当前位置:网站首页>【点云系列】 场景识别类导读
【点云系列】 场景识别类导读
2022-04-23 06:11:00 【^_^ 晅菲】
终于可以简单写一下这一块的导读了,拖了一个多周了。希望可以帮助到大家;)
1. 背景知识
点云检索(point cloud retrieval) vs 场景识别(place recognition)
点云检索,其实非常直观了,就像 图像检索一样,以图搜图,这里只不过是点云搜点云。随着数据从1D–>2D–>3D的发展,这样的检索系统自然也就需要了。

场景识别可以看做是点云检索的一个实例,或者说一个应用场景。
场景识别主要针对自动驾驶当中,可识别当前场景是否在已规划路线当中并进行判断。
2. 定义
假设数据库集合为M,点云队列为Q,我们的目标就是检索出点云队列Q当中的每个点云其在数据集合M当中结构最相似的一个。设计任务点有:
- 如何表达一副点云?
- 相似度如何衡量?
3. 传统方法
基准线三步骤:
- 特征提取
- 特征编码
- 匹配

具体参考流程:
An evaluation of feature encoding techniques for non-rigid and rigid 3D point cloud retrieval
其他相关参考文献:
- A survey of content based 3d shape retrieval methods 2004
- local descriptors: A comprehensive performance evaluation of 3d local feature descriptors(传统局部特征描述子)
- mesh retrieval:Feature encoding of spectral signatures for 3d non-rigid shape retrieval
- The bag of words approach for retrieval and categorization of 3d objects
- 3D point cloud retrieval with bidirectional feature match IEEE Access 2019 (匹配)
- 3D point cloud retrieval with bidirectional feature match (匹配)
4. 基于深度学习的方法
现有历程:
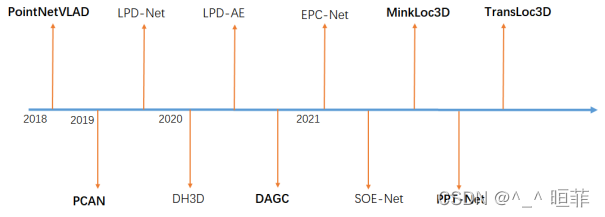
个别方法简介:
- PointNetVLAD: 先驱工作,主要结合PointNet+NetVLAD+ 四元组户函数
- PCAN:使用PointNet++分组的思想来提升特征表达;
- LPD-Net:特征使用基于学习的+手工设计的,同时使用图结构来提升效果,代价高
- DH3D:使用6自由度,更侧重于SLAM方向,所以没有具体去阅读了
- LPD-AE:是LPD-Net的后续版本,使用AE,其中Encoder用于提取特征,Decoder用于重构,同时实现了两个任务:提取的特征用来检索;重构用于复现特征到点云;
- DAGC:主要使用了DGCNN的图卷积,以及双向attention。
- EPC-Net:还未中。Efficient 3D Point Cloud Feature Learning for Large-Scale Place Recognition
- SOE-Net:用到了PointShift那篇文章的思想来有向特征。
- MinkLoc3D:用到了明科夫斯基点云卷积来简化特征表达,同时使用了Geo Mean池化方法替代NetVLAD,是当前最有效的方法
- PPT-Net:金字塔架构+图结构,效果最好
- TransLoc3D:与PPT-Net思想类似,用到了Transformer的思想,arXiv最新文章。
还未详细讲解的后续慢慢增加。
5. 其他参考:
- 相关会议: 3D oject retrieva (3DOR)
- Track:14 years of Retrieval Contest (SHREC) track
- 相关最新列表:https://github.com/kxhit/awesome-point-cloud-place-recognition
版权声明
本文为[^_^ 晅菲]所创,转载请带上原文链接,感谢
https://blog.csdn.net/weixin_43882112/article/details/121618256
边栏推荐
- MySQL notes 3_ Restraint_ Primary key constraint
- 【点云系列】Learning Representations and Generative Models for 3D pointclouds
- Summary of image classification white box anti attack technology
- 第1章 NumPy基础
- MySQL notes 1_ database
- What did you do during the internship
- Binder mechanism principle
- Reading notes - activity
- 第4章 Pytorch数据处理工具箱
- [point cloud series] a rotation invariant framework for deep point cloud analysis
猜你喜欢

【2021年新书推荐】Professional Azure SQL Managed Database Administration
PyMySQL连接数据库

Google AdMob advertising learning
微信小程序 使用wxml2canvas插件生成图片部分问题记录

【点云系列】Fully-Convolutional geometric features

Easyui combobox 判断输入项是否存在于下拉列表中

ArcGIS license server administrator cannot start the workaround
第2章 Pytorch基础1

【点云系列】Pointfilter: Point Cloud Filtering via Encoder-Decoder Modeling

Summary of image classification white box anti attack technology
随机推荐
机器学习 三: 基于逻辑回归的分类预测
[dynamic programming] different binary search trees
ProcessBuilder工具类
“Expression #1 of SELECT list is not in GROUP BY clause and contains nonaggregated
红外传感器控制开关
【2021年新书推荐】Red Hat Certified Engineer (RHCE) Study Guide
DCMTK(DCM4CHE)与DICOOGLE协同工作
【點雲系列】SG-GAN: Adversarial Self-Attention GCN for Point Cloud Topological Parts Generation
Pytorch model pruning example tutorial III. multi parameter and global pruning
第2章 Pytorch基础1
C connection of new world Internet of things cloud platform (simple understanding version)
Kotlin征途之data class [数据类]
Computer shutdown program
第8章 生成式深度学习
Chapter 1 numpy Foundation
【2021年新书推荐】Effortless App Development with Oracle Visual Builder
MySQL notes 5_ Operation data
【动态规划】不同路径2
第5 章 机器学习基础
DCMTK (dcm4che) works together with dicoogle