当前位置:网站首页>Rethinking LiDAR Object Detection in adverse weather conditions
Rethinking LiDAR Object Detection in adverse weather conditions
2022-08-11 05:23:00 【zhSunw】
Rethinking LiDAR Object Detection in adverse weather conditions
在DENSE数据集上进行了充分对比实验,通过实验结果推测出改进网络在恶劣天气条件下检测性能的决定性因素(存疑)
EXPERIMENTS
将DENSE数据集上的训练集划分出五个子集:
AW、AWs:所有天气(采样)
CW、CWs:晴朗天气(采样)
CWfs:CW训练集的30%加入雾模拟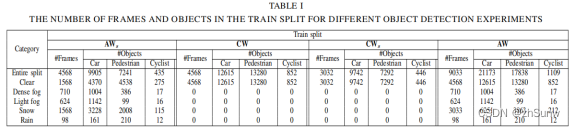
Conclusion
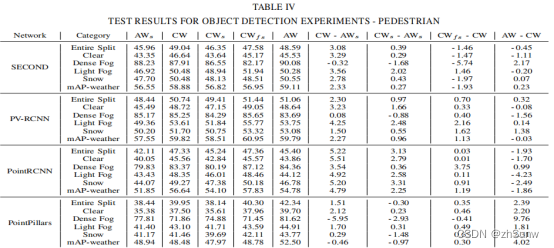
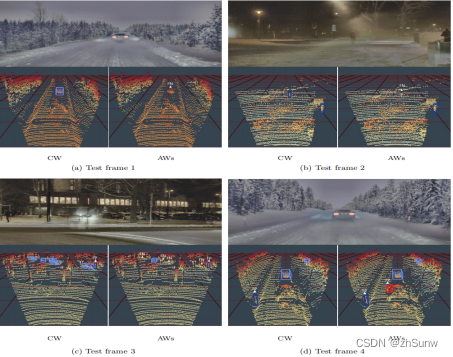
在同一测试集中的汽车和行人上不同训练集和不同模型的表现结果: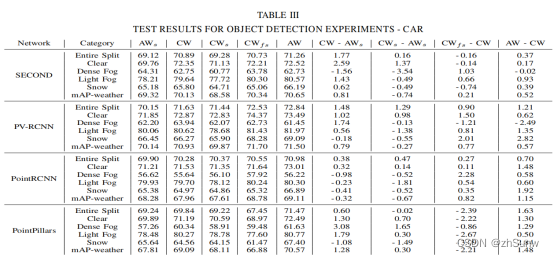
实验结果分析
- 大多数网络在CW中的mAP比AWs更高——每个类提供的训练对象更多
- 降低CW的帧数即CWs,CWs与AWs具有相近的训练对象,所有网络也有着相近的mAP
- 比较实验CW和CWfs:由于注释的边界框集保持不变,所有网络都有着几乎相似的mAP,在少数情况下,由于数据的增强,CWfs略有提高。
- 比较实验AW和CW:随着训练数据的增加,PointPillar的mAP明显提高。但对于其他网络则达到瓶颈几乎没有变化,这表明某些网络架构可能更具有标签量效率。
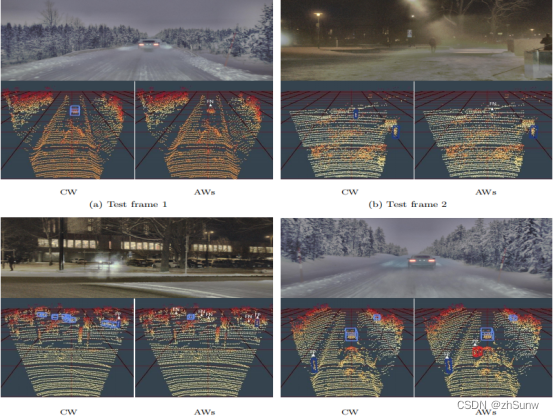
- 通过定性可视化比较,在大多数情况下,网络学会了区分真实的物体和由恶劣天气产生的噪声:
论文给出的结论
- 即使在晴天条件下进行训练,这些网络在恶劣天气下的表现也具有竞争力
- 网络通过利用更大尺寸的训练数据以端到端的方式学习和区分真实对象与天气噪声的能力表明,可能不需要附加点云去噪过滤步骤。
思考
不同网络结构导致其对恶劣天气数据的泛化适应能力不同导致表现结果不同,同等数据量下,网络难以直接学习到恶劣天气数据的特征,并且由于恶劣天气下的标签信息减少、标签信息不完整等原因可能导致网络的学习情况更差,因此恶劣天气数据的学习更加困难,需要更大的数据量,并且还需要设计对应的模块来辅助网络突破瓶颈更好地学习。
边栏推荐
猜你喜欢

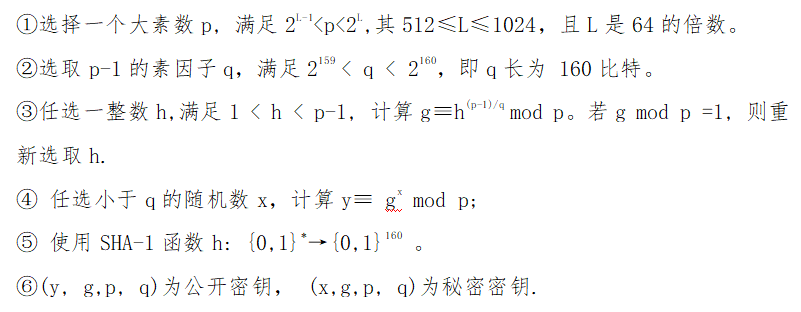
![《现代密码学》学习笔记——第三章 分组密码 [三]分组密码的运行模式](/img/31/e64d08fdc9b55596f2c38914d705e6.png)


随机推荐
php反序列化pop链
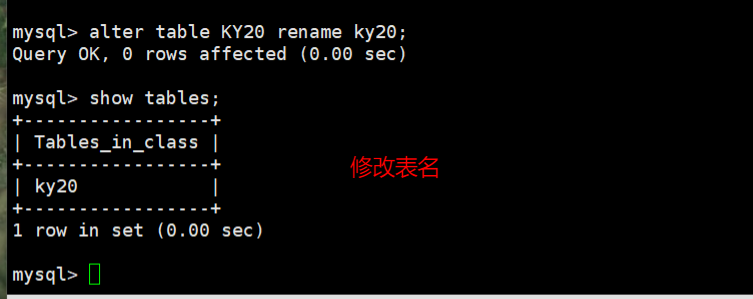
mysql基本概念之事务
Mobx--store状态管理工具
创建虚拟dom
Redis持久化方案RDB详解
OSPF综合实验
分布式日志存储架构代码实践
Redis主从复制的搭建
更新GreenDAO实体类导致的编译错误
无字母数字RCE
Redis哨兵模式
ES6新增数据类型-Symbol
LVS负载群集--DR模式
GBase 8s与Oracle存储对比
Nodered系列—写入tDengine超级表,自动创建子表
海外媒体发稿,要考虑到不同的民族文化特点
order by注入,limit注入,宽字节注入
GBase 8a MPP Cluster产品支撑的平台
GBase 8s的分片和索引
GBase 8s与Oracle锁对比