当前位置:网站首页>3、ROS工作空间的创建
3、ROS工作空间的创建
2022-08-10 03:45:00 【小果壳】
经过前面两个章节的,已经成功安装了ROS和cmake,现在就可以开发ROS工程了。
首先间述一下ROS的文件组织方式,ROS的文件存放在系统空间和工作空间两个地方。
1、系统空间就是存放ROS系统安装目录的地方,在 /opt/ros/ 目录中存放着ROS的核心程序,工具以及各种库,文件时二进制形式,用户不可修改。在进行ROS开发时,要使用系统空间的工具和程序,不许激活ros的系统空间。使用如下命令。
#将激活ROS系统空间的指令添加到~/.bashrc脚本中,(系统每次启动后都会自动运行该脚本)
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
#手动执行.bashrc脚本
source ~/.bashrc
2、工作空间是用户开发自己ROS工程的目录,或者叫文件夹。是用户自己创建的。工作空间中存放着各种用户自己开发的功能包程序,以源码的形式存在,用户可以自由修改,并且根据需要用户可以创建多个用户空间。创建用户空间的步奏如下:
#创建一个叫ROS的文件夹,用来作为用户空间
mkdir ~/ROS
#创建一个叫src的文件夹,作为源文件空间
mkdir ~/ROS/src
#进入src目录
cd ~/ROS/src
#初始化src目录
catkin_init_workspace
#对工作空间进行首次编译
cd ..
catkin_make
经过这些操作之后,在ROS下会生成 build 和 devel 两个文件夹,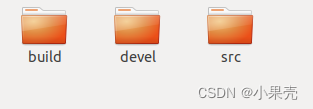
这样在ROS工作空间中就存在了三个文件夹,src文件夹放置各种功能包和配置功能包的CMake配置文件CMakeList.txt,build文件夹放置编译功能包时产生的缓存、配置、中剑文件等,devel文件夹放置编译好的可执行程序,这些可执行程序是不需要安装就可以直接运行的。一旦功能包源码编译和测试通过后,可以将这些编译好的可执行文件直接导出与其他开发人员分享。
到此ROS的工作空间创建完成。下一节开始开发功能包。
边栏推荐
猜你喜欢

随机推荐
125. 耍杂技的牛
ZZULIOJ:1029: 三角形判定
Flink Table&Sql API使用遇到的问题总结
Flutter 如何安装 pub.dev 上的 package
互联网公司高频面试题精讲:测试计划和测试方案有什么区别?
Pytorch中的torch.index_select对应MindSpore哪个方法
【网络迁移】Pytorch中的torch.is_tensor对应MindSpore哪个接口
maya图片如何导入
TCP协议之《MTU探测功能》
goland json.Marshal导致&变成\u0026
长沙:借网红的风,铺长红的路
数据库中数据的正确性和相容性是什么
ZZULIOJ:1028: I love 闰年!
874. 筛法求欧拉函数
golang中的URL 的编码和解码(转)
Difference between netstat and ss command
2022年P气瓶充装操作证考试题库及模拟考试
C语言结构体初识
C语言顺序表(源码)
ZZULIOJ:1019: 公园门票