当前位置:网站首页>PID与ADRC
PID与ADRC
2022-08-10 03:38:00 【熊孩纸的世界你不懂】
目录
一、 PID算法
1. 定义:
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很 常见的控制算法。常见的PID算法,位置式PID,增量式PID,串级PID等。
2. PID的意义:
以电机转速为例子来解释,电机随着使用时间的增加,电机的性能其实会发生变化,输出相同的PWM值,速度会和最开始测得的值是不一样的。我们有一辆小车(电机控制小车的速度),如果我改变小车的负重,根据生活中的常识,相同的输出电压下,负载越重,小车的速度越慢的。所以说仅仅输出一个PWM值,是不能精确控制电机转动的速度保持在相同的值。这个时候PID的算法就会体现出重要的作用。现在,我用一个编码器来读取电机速度(编码器可以精确读取电机的转动速度),编码器的作用就是把电机转动的速度(模拟量)转化为一个数字量,传入到我们的微处理器。我们使用PID算法本质上是为了让编码器的值(即速度)稳定在一个值。 PID调参变成了如何让编码器的值(速度)保持在一个固定值。
3. P,I,D的控制原理:
简易的PID控制,我们使用PID处理的函数,函数中包括两个参数,一个是编码器测量到当前的速度值(position),另一个就是目标速度值(target)。
3.1. P值的作用:
如果当前的速度值和目标的速度值相差很大,我们就想增大电机的PWM输出,让电机快速达到目标值,PID中的P就扮演着重要的作用,可以联想到PWM=P*(target-position),当前的速度值和目标的速度值相差越大,输出的PWM值就会越大,可以快速达到目标速度值。
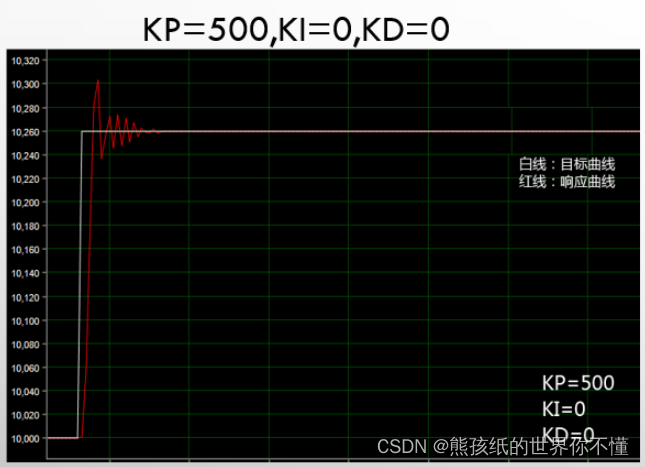
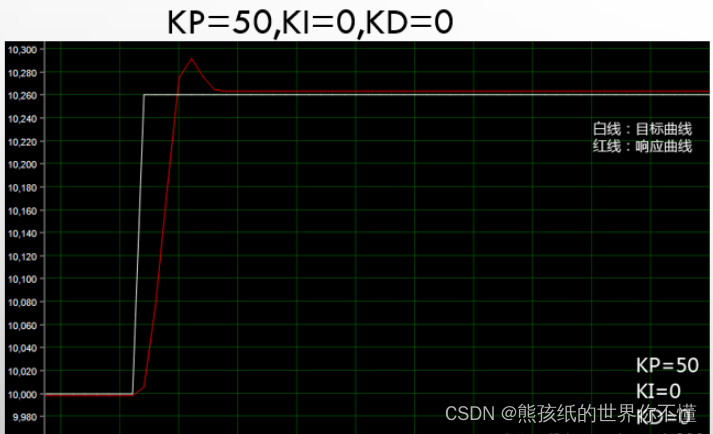
结论:没有积分控制且比例控制较弱时,会出现静差。P值较小情况下,响应速度变慢;P值较大情况下,虽然响应速度比较快,但是震荡严重。
3.2. D值的作用:
PID中的D主要作用于振荡抑制。当比较接近目标时,P的控制作用就比较小了。越接近目标,P的作用越温柔。有很多内在的或者外部的因素,使控制量发生小范围的摆动。
D的作用就是让物理量的速度趋于0,只要什么时候,这个量具有了速度,D就向相反的方向用力,尽力抑制住振荡的变化。
现在我们引入偏差值的概念,令Bia=taget-position,令上一次求得的偏差值为Last_Bia。
D项的计算公式为 D*(Bia - Last_Bia)
举例:现在让当前的速度值为90,目标值为100,Bias=10。现在是为了接近目标值,所以D项的结果是增加PWM。现在增加后的速度变成了105,Bias=-5,Last_Bias=10,Bias-Last_Bias=-15,如果增加后的速度为110,Bias=-10,Last_Bias=10,Bias-Last_Bias=-20,D项的计算结果是为了减小PWM,快速抑制住PWM的过量增加,超过目标值越多,那么抑制能力越厉害。
3.3. I值的作用:
PID中的I的作用是为了消除静差,静差就是指,稳定状态下当前值和目标值的差;
举例:
假如有个人把我们的加热装置带到了非常冷的地方,开始烧水了。需要烧到50℃。在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。这可怎么办?P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。于是,水温永远地停留在45℃,永远到不了50℃。
作为一个人,根据常识,我们知道,应该进一步增加加热的功率。可是增加多少该如何计算呢?
设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上;
这样一来,即使45℃和50℃相差不太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加。系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!
到了目标温度后,假设温度没有波动,积分值就不会再变动。这时,加热功率仍然等于散热功率。但是,温度是稳稳的50℃。
I 的值越大,积分时乘的系数就越大,积分效果越明显。
I在使用时还有个问题:需要设定积分限制,防止在刚开始加热时,就把积分量积得太大,难以控制。
3.4. 程序示例:
/**************************************************************************
函数功能:位置式PID控制器
入口参数:编码器测量位置信息,目标位置
返回 值:电机PWM
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
**************************************************************************/
int Position_PID (int position,int target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=target-position; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias); //位置式PID控制器
Last_Bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
/**************************************************************************
函数功能:增量PI控制器
入口参数:编码器测量值,目标速度
返回 值:电机PWM
根据增量式离散PID公式
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
pwm代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
**************************************************************************/
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Target-Encoder; //计算偏差
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias; //增量式PI控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
二、 ADRC算法
1.背景:
干扰,或者称扰动,是指系统外部的环境出现变化,或者系统内部特性改变,最终影响了系统的性能。例如上面提到的无人机的螺旋桨,空气阻力随转速变化,影响电机速度的稳定性,这个是外部扰动;当电机长时间运行后,温度明显上升,铜线圈的电阻值升高,原来预估的给多少V电压就得到多少A电流的关系不存在了,这是内部扰动。
来个假设吧,如果世界一切美好、没有任何内外扰动,那么对于任何系统,只要调整好一次PID参数,就可在任何情况下都达到理想效果。但事与愿违,扰动无处不在,如何实现“他强由他强,清风拂山岗;他横由他横,明月照大江”的抗扰动效果,一直是自控工程中最核心的研究工作。
2. 原理及组成:
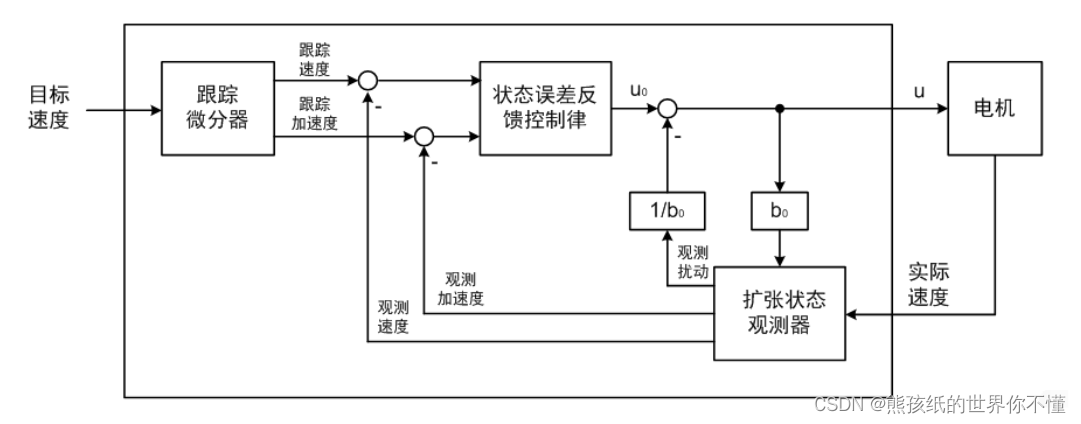
ADRC的核心有三大模块:跟踪微分器、扩张状态观测器和状态误差反馈控制律。
对于电机速度控制,跟踪微分器的输入是目标速度;输出是跟踪速度和跟踪加速度,跟踪速度等于目标速度,跟踪加速度就是目标加速度。
扩张状态观测器的输入分别是:实际速度、输出电压u和系数b0的乘积;输出分别是观测速度、观测加速度和观测扰动,其中观测速度等于实际速度,观测加速度等于实际加速度,观测扰动是系统内部和外部的总扰动,它除以b0后,减去状态误差反馈控制律输出的电压u0,即得到给电机的电压u。
状态误差反馈控制律根据速度误差(跟踪速度-观测速度)、加速度误差(跟踪加速度-观测加速度),输出电压u0,如果两个误差都为零,那么u0为零。系数b0是大致设定的参数,在这里它表示多少V电压对应多少转速RPM。ADRC不管电压和速度的真实关系,它只按自己设定的b0去控制,它认为当前电压是u,速度应该是u*b0,如果实际速度有不同,偏差都认为是扰动(观测扰动),可能是外部阻力变化引起的,也可能是电机内部参数估计不准引起的。观测扰动除以b0后,直接补偿到u输出。所以ADRC就是任性,它无需专门测量扰动,“他自狠来他自恶,我自一口真气足”。
另外,如果系统同时明确:目标速度和目标加速度,那么可以省去跟踪微分器,直接输入这两个量。
3. 算法特点:
3.1. 几乎和模型无关
ADRC适用于从对对象模型一无所知到完全掌握对象模型的任何情况,如图,大致设定电压和速度的关系b0即可。当然如果能准确捕捉到这个关系,ADRC工作强度将减轻,效果更佳。例如我们正在研究,当电机正在运行、发热严重时,电机内部的电阻、电感、反向电动势等参数都明显变化,在不注入额外测量信号下(尽量不影响电机运行),如何利用AI人工智能神经元技术,准确估算电机参数、重构电机模型b0,这样ADRC的性能将更经一步提升。
3.2. 反应敏捷
传统PID控制都要等到误差发生后,才能去补偿控制,而ADRC将观察到的扰动第一时间补偿到输出端。而且PID中的微分项D,虽然说有预测功能,但是它仅仅是将本次的误差减去上一次的误差,得到很粗劣的微分结果,而ADRC使用跟踪微分器,准确跟踪目标值的微分(图示跟踪加速度),以及用扩张状态观测器得出实际值的微分(图示观测加速度),两个相减即为准确的误差微分。
基于PID的FOC控制:

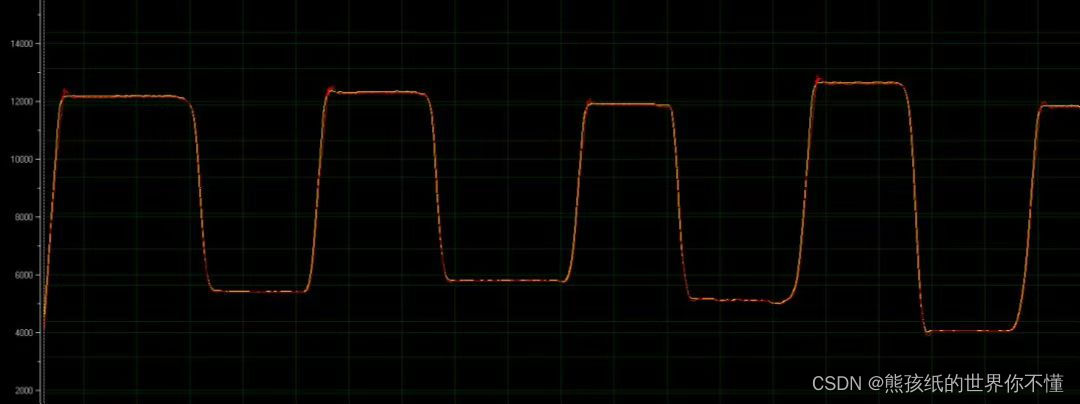
基于ADRC的FOC控制:
边栏推荐
猜你喜欢



随机推荐
goland json.Marshal导致&变成\u0026
怎么进行服务器性能监控,有什么监控工具
基于Nonebot2的qq机器人如何测试超管账号
【Verilog数字系统设计(夏雨闻)6-------模块的结构、数据类型、变量和基本运算符号2】
原型和原型链
TCP协议之《发送缓存控制tcp_notsent_lowat》
applet wxs
TCP协议之《ACK报文限速》
请教各位confluence部署连接数据库成功,但是在后面建表设置的时候报错
shell文本编辑awk
C语言原码,反码,补码与大小端
BFF避坑指南
金融口译,口译中金融高频词有哪些
@Autowired注解 --required a single bean, but 2 were found出现的原因以及解决方法
ARP Spoofing - Tutorial Details
...spread、命名空间、假报错、变化事件、async/await
Evaluation and Construction of Enterprise Network Security Capability from the Sliding Ruler Model
【mindspore产品】【8卡分布式训练】davinci_model : load task fail, return ret
小程序导航及导航传参
搭建Prometheus+Grafana框架监控Hyperledger Fabric的运行