当前位置:网站首页>UKFslam
UKFslam
2022-04-23 20:41:00 【xiaoma_bk】
UKF
UKF
- KF 系列求解:
Kalman filter需要线性模型EKF通过泰勒展开线性化- 更好的方式线性化 ->
Unscented Transform->UKF- 计算一组(所谓的)sigma 点
- 从变换和加权的 sigma 点计算高斯
Unscented Transform- 计算一系列的 Sigma 点
- 每个Sigma点有一个权重
- 通过非线性函数转换 Sigma 点
- 权重点计算高斯
Sigma and weight
Sigma 点- 选择 χ [ i ] {\chi^{[i]}} χ[i], w [ i ] {w^{[i]}} w[i] 使得:
- ∑ i w [ i ] = 1 {\sum_i w^{[i]} = 1} ∑iw[i]=1
- μ = ∑ i w [ i ] χ [ i ] { \mu = \sum_i w^{[i]}\chi^{[i]}} μ=∑iw[i]χ[i]
- ∑ = ∑ i w [ i ] ( χ [ i ] − μ ) ( χ [ i ] − μ ) T {\sum = \sum_i w^{[i]}(\chi^{[i]}-\mu)(\chi^{[i]}-\mu)^T} ∑=∑iw[i](χ[i]−μ)(χ[i]−μ)T
- 没有唯一的解决方案
- 如何选择Sigma点
- 第一个Sigma点也是均值 χ [ 0 ] = μ {\chi^[0] = \mu} χ[0]=μ
- χ [ i ] = μ + ( ( n + λ ) ∑ ) i {\chi^[i] = \mu + (\sqrt{(n+\lambda)\sum})_i} χ[i]=μ+((n+λ)∑)i for i=1,…,n
- χ [ i ] = μ − ( ( n + λ ) ∑ ) i − n {\chi^[i] = \mu - (\sqrt{(n+\lambda)\sum})_{i-n}} χ[i]=μ−((n+λ)∑)i−n for i=1+n,…,2n
- 矩阵平方根
- 定义 S S S, ∑ = S S \sum=SS ∑=SS
- 通过对角化计算:
- ∑ = V D V − 1 = ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) = V ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) V − 1 {\sum=VDV^{-1}= \begin{pmatrix} d_{11} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & d_{nn} \end{pmatrix} = V\begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} \begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} V^{-1}} ∑=VDV−1=⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞=V⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞V−1
- 因此可以定义: S = V D 1 / 2 V − 1 {S=VD^{1/2}V^{-1}} S=VD1/2V−1
Cholesky Matrix平方根法- 矩阵平方根的替代定义: L , ∑ = L L T {L, \sum=LL^T} L,∑=LLT
- L , ∑ {L,\sum} L,∑ 有相同的特征向量
- Sigma 点可以但不必位于 ∑ {\sum} ∑
- 如何设置权重
- w m [ 0 ] = λ n + λ {w_m^{[0]}=\frac{\lambda}{n+\lambda}} wm[0]=n+λλ
- w c [ 0 ] = w m [ 0 ] + ( 1 − α 2 + β ) {w_c^{[0]}=w_m^{[0]}+(1-\alpha^2+\beta)} wc[0]=wm[0]+(1−α2+β)
- w c [ i ] = w m [ i ] + 1 2 ( n + λ ) {w_c^{[i]}=w_m^{[i]}+\frac{1}{2(n+\lambda)}} wc[i]=wm[i]+2(n+λ)1 for i=1,…,2n
- 选择 χ [ i ] {\chi^{[i]}} χ[i], w [ i ] {w^{[i]}} w[i] 使得:
UKF Algorithm
-
Prediction
-
χ t − 1 = ( μ t − 1 , μ t − 1 + ( n + λ ) ∑ t − 1 , μ t − 1 − ( n + λ ) ∑ t − 1 ) {\chi_{t-1}=(\mu_{t-1},\ \ \mu_{t-1}+\sqrt{(n+\lambda)\sum_{t-1}},\ \ \mu_{t-1}-\sqrt{(n+\lambda)\sum_{t-1}})} χt−1=(μt−1, μt−1+(n+λ)∑t−1, μt−1−(n+λ)∑t−1)
-
χ ˉ t ∗ = g ( u t , χ t − 1 ) {\bar{\chi}_t^* = g(u_t,\chi_{t-1})} χˉt∗=g(ut,χt−1)
-
μ t ˉ = ∑ i = 0 2 n w m [ i ] χ ˉ t ∗ [ i ] {\bar{\mu_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{\chi}_t^{*[i]}} μtˉ=∑i=02nwm[i]χˉt∗[i]
-
Σ ˉ t = ∑ i = 0 2 n w c [ i ] ( χ ˉ t ∗ [ i ] − μ t ˉ ) ( χ ˉ t ∗ [ i ] − μ t ˉ ) T + R t {\bar{\Sigma}_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{*[i]}-\bar{\mu_t})(\bar{\chi}_t^{*[i]}-\bar{\mu_t})^T+R_t} Σˉt=∑i=02nwc[i](χˉt∗[i]−μtˉ)(χˉt∗[i]−μtˉ)T+Rt
-
-
Correction
- χ t ˉ = ( μ t ˉ , μ t ˉ + ( n + λ ) ∑ t − 1 , μ t ˉ − ( n + λ ) ∑ t − 1 ) {\bar{\chi_{t} }=(\bar{\mu_{t}},\ \ \bar{\mu_{t}}+\sqrt{(n+\lambda)\sum_{t-1}},\ \ \bar{\mu_{t}}-\sqrt{(n+\lambda)\sum_{t-1}})} χtˉ=(μtˉ, μtˉ+(n+λ)∑t−1, μtˉ−(n+λ)∑t−1)
- z t ˉ = h ( χ t ˉ ) {\bar{z_t}=h(\bar{\chi_t})} ztˉ=h(χtˉ)
- z t ^ = ∑ i = 0 2 n w m [ i ] z ˉ t [ i ] {\hat{z_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{z}_t^{[i]}} zt^=∑i=02nwm[i]zˉt[i]
- S t = ∑ i = 0 2 n w c [ i ] ( χ ˉ t [ i ] − μ ˉ t ) ( χ ˉ t [ i ] − μ ˉ t ) T {S_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{[i]}-\bar{\mu}_t)(\bar{\chi}_t^{[i]}-\bar{\mu}_t)^T} St=∑i=02nwc[i](χˉt[i]−μˉt)(χˉt[i]−μˉt)T
- K t = ∑ ˉ t x , z S t − 1 {K_t = \bar{\sum}_t^{x,z}S_t^{-1}} Kt=∑ˉtx,zSt−1
- ∑ t = ∑ ˉ t − K t S t K t T {\sum_t =\bar{\sum}_t - K_tS_tK_t^T} ∑t=∑ˉt−KtStKtT
UT/UKF/EKF Summary
-
UT/UKF
- 无迹卡尔曼作为线性化的替代方案
- UT 是比泰勒展开更好的近似值
- UT 使用 sigma 点传播
- UT中的自由参数
- UKF 在预测和校正步骤中使用 UT
-
UKF VS EKF
- 线性模型的结果与 EKF 相同
- 非线性模型比 EKF 更好的近似
- 差异通常“有点小”
- UKF 不需要雅可比行列式
- 相同的复杂度类
- 比 EKF 稍慢
- 仍然受限于高斯分布
版权声明
本文为[xiaoma_bk]所创,转载请带上原文链接,感谢
https://blog.csdn.net/xiaoma_bk/article/details/124243965
边栏推荐
- 6-5 字符串 - 2. 字符串复制(赋值) (10 分)C语言标准函数库中包括 strcpy 函数,用于字符串复制(赋值)。作为练习,我们自己编写一个功能与之相同的函数。
- Vscode download speed up
- I JS deep copy and shallow copy
- 启牛学堂有用吗,推荐的证券账户是否安全
- LeetCode 116. 填充每个节点的下一个右侧节点指针
- Unity ECS dots notes
- Unity animation creates sequence frame code and generates animationclip
- Automatically fill in body temperature and win10 task plan
- Fastdfs思维导图
- Commande dos pour la pénétration de l'Intranet
猜你喜欢

Unity Odin ProgressBar add value column

Devexpress 14.1 installation record
Actual measurement of automatic ticket grabbing script of barley network based on selenium (the first part of the new year)
"Meta function" of tidb 6.0: what is placement rules in SQL?
Plato Farm元宇宙IEO上线四大,链上交易颇高
Go zero framework database avoidance Guide
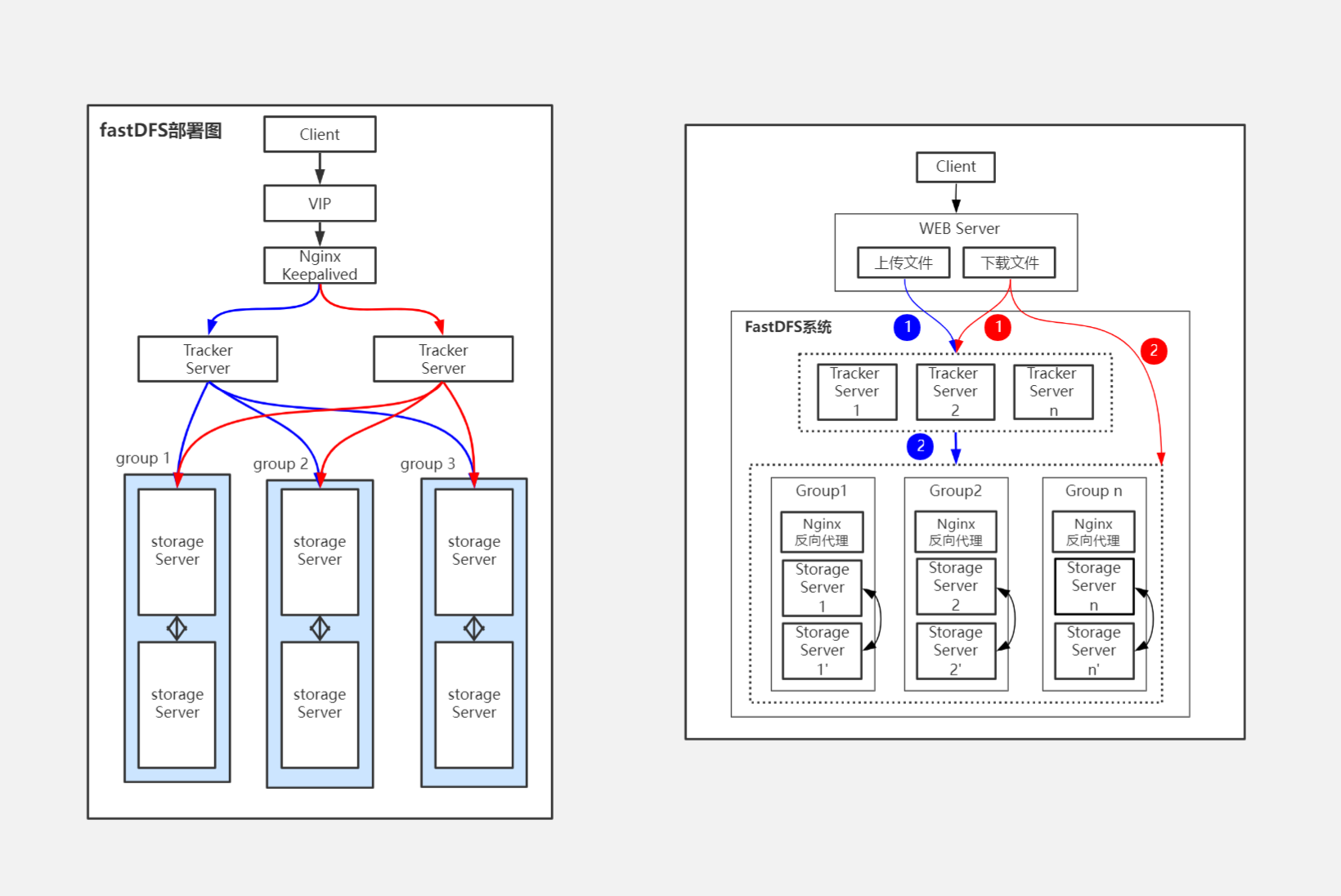
Fastdfs思维导图
Vscode download speed up

Tensorflow 2 basic operation dictionary
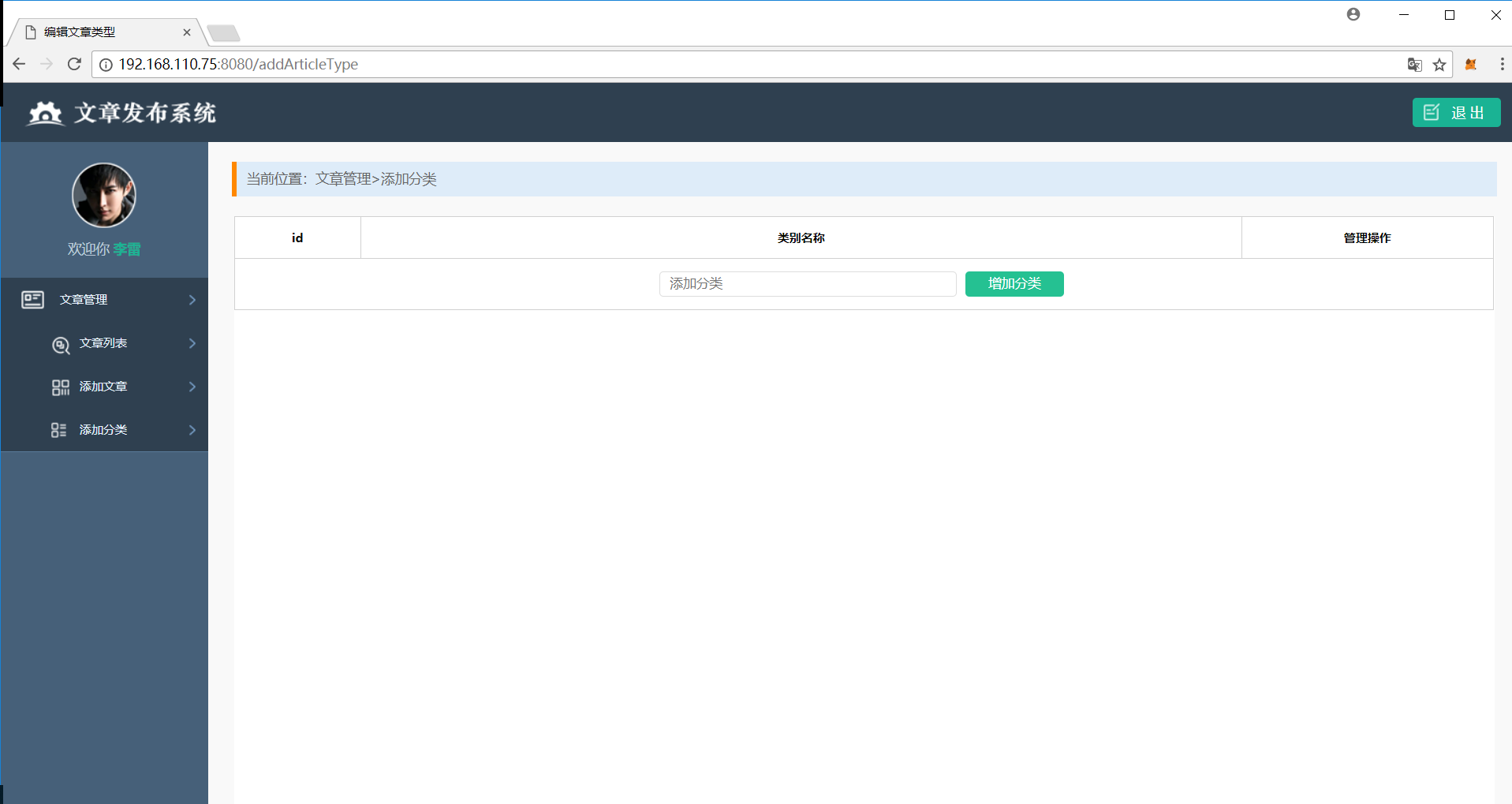
GO語言開發天天生鮮項目第三天 案例-新聞發布系統二
随机推荐
学会打字后的思考
Easy to use nprogress progress bar
深入探究ASP.NET Core读取Request.Body的正确方式
MySQL进阶之数据的增删改查(DML)
vulnhub DC:1渗透笔记
Commande dos pour la pénétration de l'Intranet
Leetcode 232, queue with stack
JSX syntax rules
Actual measurement of automatic ticket grabbing script of barley network based on selenium (the first part of the new year)
Vscode download speed up
黑客的入侵方式你知道几种?
2022DASCTF Apr X FATE 防疫挑战赛 CRYPTO easy_real
MySQL进阶之常用函数
【栈和队列专题】—— 滑动窗口
上海回應“面粉官網是非法網站”:疏於運維被“黑”,警方已立案
[PTA] l1-006 continuity factor
[matlab 2016 use mex command to find editor visual studio 2019]
Plato Farm元宇宙IEO上线四大,链上交易颇高
Latest investigation and progress of building intelligence based on sati
缓存淘汰算法初步认识(LRU和LFU)