当前位置:网站首页>[3D shape reconstruction series] implicit functions in feature space for 3D shape reconstruction and completion
[3D shape reconstruction series] implicit functions in feature space for 3D shape reconstruction and completion
2022-04-23 07:20:00 【^_^ Min Fei】
List of articles
Inventory clearing series , It's been a long time .
1. Summary
subject :Implicit Functions in Feature Space for 3D Shape Reconstruction and Completion,CVPR 2020
The paper :https://virtualhumans.mpi-inf.mpg.de/papers/chibane20ifnet/chibane20ifnet.pdf
Code :https://virtualhumans.mpiinf.mpg.de/ifnets/.
2. motivation
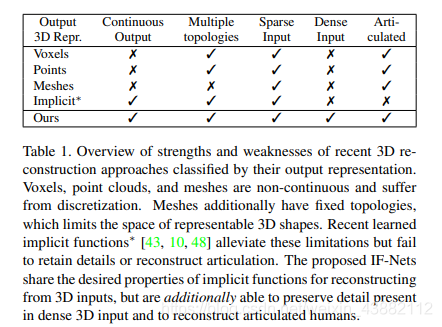
The existing reconstruction of rigid objects is limited by two points :
- Cannot represent complex objects , For example, reconstruction often loses arms or legs ;
- They cannot retain the details presented in the input data .
Reasons for possible limitations :
- Online learning in xyz Too strong a priori in coordinates destroys the inflexibility of clarity ;
- The shape coding vector lacks three bit coding , This makes the code look more like a classification of shape prototypes , Instead of continuous regression . therefore , The current method is limited by the above 2 spot ;
This work is based on the above considerations , Propose hidden feature network , stay 5 Three dimensions have been improved .
The desired effect :
3 Algorithm
In essence, it is decode The design of the , because encoder Is the basic feature extraction part ; and decoder In fact, whether the prediction point is inside or outside the object , Then the boundary between the two is the object surface we need . Finally, it is necessary to reproduce the continuous surface through other algorithms . Because the discrete value of the output :0 or 1.
3.1 background : Implicit surface learning
Definition occupancy The formula . Use invisible expression z z z Encoding 3D shape . Then the continuous shape expression can be obtained by learning neural function :

Surface pass [0,1] Set whether it belongs to the inside or outside of the object . In this case, the surface is the edge of decision-making . Continuous representation can be unrestricted by pixels .
Later, you can build mesh in marching cubes Algorithm to express object constraints , But there are two limitations :
- Unable to express complex objects , for example Jointed figures, etc .
- Failed to keep the details of the input data .
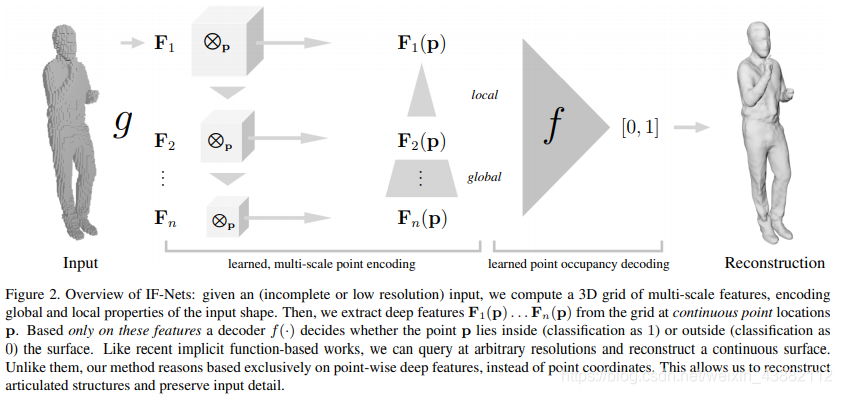
3.2 Invisible feature network
Shape coding g g g: Used 3D Convolution , Multiscale depth feature grid F F F, as follows :

In fact, the most important thing is to use occupancy Achieve multi-resolution output , In the process of knowledge, multi-scale is used to ensure the retention of details .
Shape decoding f f f:
It is different from the direct point cloud coordinates p \mathbf{p} p To classify , By learning the coordinates of our features F 1 ( p ) , . . . , F n ( p ) \mathbf{F}_1(\mathbf{p}),..., \mathbf{F}_n(\mathbf{p}) F1(p),...,Fn(p). Because the feature grid is discrete , Therefore, cubic linear interpolation is used to obtain continuous 3D spot . This is to encode a point and its field points in the front small receptive field area , Cartesian coordinates are expressed as follows :

among d d d Is the point from the center . e i e_i ei For the first time i i i A Cartesian unit vector .
Input the encoder result to the decoder f f f, Include a full connection layer to predict points p \mathbf{p} p Is it outside the surface or inside , It is shown in the following formula :

So with the most basic implicit expression , The formula (1) contrast , The features here include local and global features , Not just coordinate information . Due to such a multi-scale coding mode , Details can also be well preserved .
In short, extracting feature level is omnipotent : Multi scale to consider the overall situation + Local correlation information .
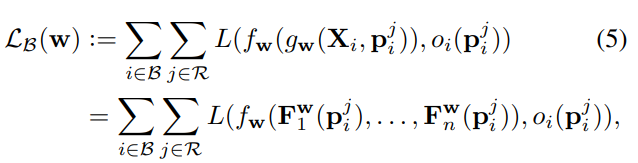
3.3 model training
Use To minimize the mini-batch To determine the loss of : In essence, it is predicted that this point is 0 still 1, And then GT Of o i ( ) o_i() oi() comparison .
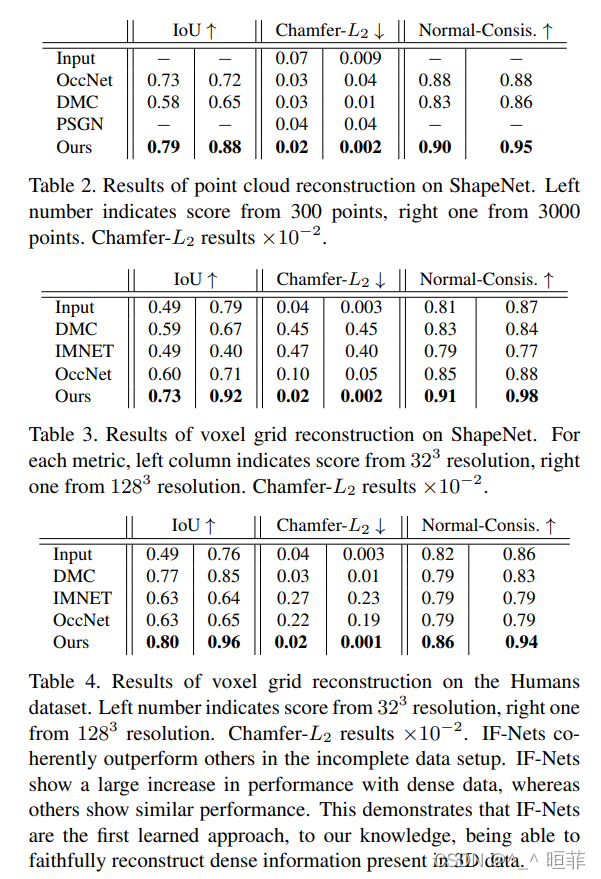
4. experimental result
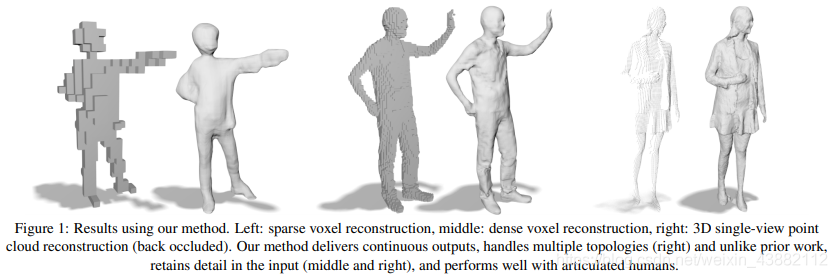
Visualization : There will be a smoother surface , Then include some details
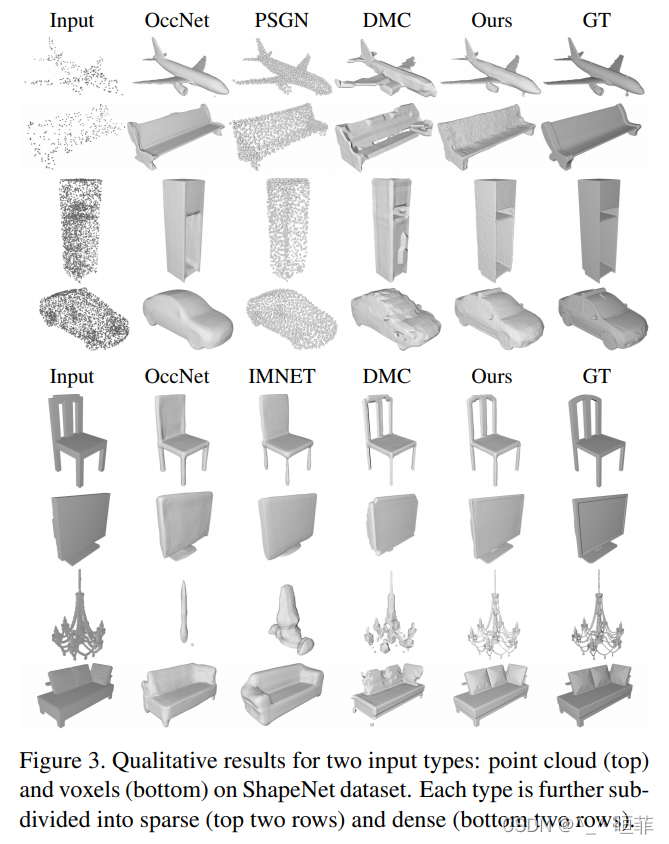
completion :
Apply to voxels :

5. Conclusion and thinking
Nature is , Turn the learning of points into Classify problems to operate , Predict where is inside the surface , Where is the outer surface , use 0,1 To label . Well, in fact, these points are discrete , Therefore, post-processing is needed to realize curved surface .
Point based : Just give each point a prediction ;
Voxel based : Use marching cubes Algorithm implementation ;
版权声明
本文为[^_^ Min Fei]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230611136314.html
边栏推荐
- Three methods to realize the rotation of ImageView with its own center as the origin
- Machine learning III: classification prediction based on logistic regression
- The Cora dataset was trained and tested using the official torch GCN
- C# EF mysql更新datetime字段报错Modifying a column with the ‘Identity‘ pattern is not supported
- Computer shutdown program
- Android exposed components - ignored component security
- [2021 book recommendation] Red Hat Certified Engineer (RHCE) Study Guide
- PyTorch最佳实践和代码编写风格指南
- [多屏互动] 实现双多屏异显二:startActivity方式
- PyTorch中的一些常见数据类型转换方法,与list和np.ndarray的转换方法
猜你喜欢

【2021年新书推荐】Enterprise Application Development with C# 9 and .NET 5

【2021年新书推荐】Red Hat Certified Engineer (RHCE) Study Guide

【2021年新书推荐】Professional Azure SQL Managed Database Administration

【点云系列】SG-GAN: Adversarial Self-Attention GCN for Point Cloud Topological Parts Generation
【2021年新书推荐】Red Hat RHCSA 8 Cert Guide: EX200

Ffmpeg common commands

Summary of image classification white box anti attack technology
[2021 book recommendation] Red Hat Certified Engineer (RHCE) Study Guide

红外传感器控制开关

【2021年新书推荐】Artificial Intelligence for IoT Cookbook
随机推荐
5种方法获取Torch网络模型参数量计算量等信息
[2021 book recommendation] practical node red programming
素数求解的n种境界
PyTorch 模型剪枝实例教程三、多参数与全局剪枝
Handler进阶之sendMessage原理探索
Itop4412 HDMI display (4.4.4_r1)
BottomSheetDialogFragment + ViewPager+Fragment+RecyclerView 滑动问题
Pytorch trains the basic process of a network in five steps
最简单完整的libwebsockets的例子
Recyclerview batch update view: notifyitemrangeinserted, notifyitemrangeremoved, notifyitemrangechanged
Miscellaneous learning
Android room database quick start
What did you do during the internship
[dynamic programming] Yang Hui triangle
【 planification dynamique】 différentes voies 2
MySQL5. 7 insert Chinese data and report an error: ` incorrect string value: '\ xb8 \ XDF \ AE \ xf9 \ X80 at row 1`
DCMTK (dcm4che) works together with dicoogle
【2021年新书推荐】Learn WinUI 3.0
BottomSheetDialogFragment 与 ListView RecyclerView ScrollView 滑动冲突问题
第1章 NumPy基础