当前位置:网站首页>LENS CRA和SENSOR CRA匹配问题解析
LENS CRA和SENSOR CRA匹配问题解析
2022-08-10 23:41:00 【悟空胆好小】
01 镜头CRA的基本概念
主光线角的英文全称是Chief Ray Angle,缩略词为CRA,其中镜头CRA的定义就是主光线(过入瞳中心的光线)通过光学系统到达像面后,与像面交点位置处的法线之间的夹角,图1从上到下展示了ZEMAX镜头库Double Gauss 28 Degree Field光学系统在14°、10°以及0°视场对应的主光线角。
图片
图1 Double Gauss 28 Degree Field
02 Sensor CRA分析
在胶片Sensor时代,由于胶片上的卤化银颗粒对各个角度的光线具有各向同性的响应,镜头的CRA不会对最终的成像质量产生太大影响,仅仅关乎着胶片表面上的照度。然而,随着工艺的提升,到CCD/CMOS Sensor时代,镜头CRA对最终的成像质量却有非常明显的影响,这是因为CCD/CMOS Sensor的基本组成元件Pixel没有各向同性的响应。说到这大家可能有点迷,其实我也有点迷,下面我们看一下Sensor上Pixcel的作用原理。
对于Sensor上的每一个Pixcel,里面都有一个微透镜,如图2所示,微透镜的主要功能就是将来自不同角度的光线进行聚焦,随着像素远离sensor中心位置,一些光线将不会聚焦于像素上,这就导致了边缘的像素接收的光照强度不断减少以及像素的光吸收区域的敏感度降低,从而导致sensor成像质量变差。
图片
图2 CMOS图像传感器微阵列透镜简化图
在图2中,像素上的微透镜并未发生平移,实际Sensor上的微透镜会发生些许平移,使得原来边缘像素收集不到的部分入射光线此时可以得到一定程度收集,原理如图3所示。当然,此举增加了中心到边缘像素收集光线的能力,但是也会遇到微透镜未平移前一样的情况,一些来自于更大角度的光线,像素存在部分或者全部收集不到的情况。
图片
图3 像素微透镜平移原理示意图
那么Sensor CRA的怎么定义呢?确切的定义我没搜索到,但是此处大概有两种说法仅供参考,一种说法是:以某一主光线角度聚焦到像素上,此时的像素响应度是以光线垂直像素(角度为0)时对应的像素响应度的80%,那么该角度就是sensor的CRA。另外一种说法是:像素可以收集10度以内的所有光线,但是到14度时,只能收集部分光线,那么可以认为Sensor CRA为10度。其实无论哪一种说法,距离Sensor中心径向不同位置处像素的CRA不一样,也就是说Sensor的CRA与其像素的位置有关。
因此,为了保证整个相机系统的成像质量,这就涉及到了镜头CRA和Sensor CRA的匹配问题。如果镜头的CRA不匹配Sensor厂商提供的CRA参考值,那么就会如开篇所言,将会对Sensor的最终成像质量产生严重的影响,
03 镜头CRA和Sensor CRA匹配测试
如果镜头的CRA与sensor的CRA不匹配,会对成像有怎样的影响呢?
(1)镜头CRA过小于Sensor的CRA时,会出现暗角,Sensor边缘受光不足,也就是镜头的阴影Lens Shading;
(2)镜头CRA过大于Sensor的CRA时,光线会折射到周边的图元pixel上,导致图元间出现干扰,即色彩阴影Color shading,特别是在图像四周更为显著。
图片
测试案例
已知HIMAX Sensor的CRA大约是24.79°,待测镜头1的焦距2.81mm,CRA约31°,匹配后成像效果如下:
图片
图片
待测镜头2的焦距3.3mm,CRA约为24.6°,同样与HIMAX Sensor匹配,成像效果如下:
图片
对比两组镜头,镜头2的CRA与HIMAX Sensor的CRA匹配度最高,成像效果也大大减少了阴影和粉红辉光的现象。
04 CRA的获取
到此。关于镜头CRA和Sensor CRA匹配的重要性不言而喻,那么关于二者的CRA该如何获取呢?针对镜头CRA的获取,在ZEMAX默认评价函数中采用RAID操作数,即可获取各个视场的CRA确切数值,然后进行数据的采集。但是如果需要进行大量数据采集的话,多行RAID就显得有点繁琐,此时可以编写ZPL宏程序,可以快速获取镜头的CRA以及相应绘图。下图是通过ZPL宏对Double Gauss 28 Degree Field光学系统的CRA数值获取以及绘图。(相应的ZPL宏可联系笔者免费获取,下一节笔者也会讲述该宏程序的构建思路)
图片
图片
关于Sensor的CRA如何获取呢?一般来说,在Sensor数据表上会富有全视场角的CRA参考值,但是有的Sensor厂家不会在公开的数据表上显示出来,那么此时该怎么办呢?直接联系你Sensor厂商获取。
05 镜头CRA和Sensor CRA匹配误差讨论
关于镜头CRA和Sensor CRA匹配,很少存在丝毫不差的匹配,那么二者之间的差异性到底多大是极限呢?一般来说,镜头的CRA值应小于Sensor 的CRA值,否则将导致成像照度或偏色问题。二者的偏差一般在±2-3度以内,要求高的在2度以内。
在Sensor CRA的曲线中,纵轴表示主光线角度,单位是度;横轴表示视场,其有两种表示方式,一种是以百分比表示,Sensor最大有效成像高度为100%,以10%依次区分;一种是从Sensor中心到最大成像高度位置,直接以mm为单位,Sensor的最大有效成像高度为Sensor有效成像面(对角线)的一半。
镜头和Sensor的CRA配合是非常重要的,但目前流传的说法也有一些错误的理论。现在重新说明:
1)Sensor存在一个CRA值,也就是Sensor的微透镜与光电二极管的位置存在一个水平误差,并不在一条直线上,如下图所示。做成这样是有一定的目的,因为Sensor 的微透镜与光电二极管之间存在一定的距离,可以更好地搭配镜头。图片
2)镜头也存在一个CRA值,这是在镜头设计的时候就要考虑的内容。根据Sensor的CRA 值进行设计,偏差在2度以内为佳,太大了,容易造成受光不足和偏色。
3)镜头CRA 并不是越小越好,有人认为0度是最佳的,这种说法也是不对的,只能说与Senso的CRA 越接近越好。
图片
图片
06 参考文献
(1)
http://kb.colorspace.com.cn/kb/2020/04/08/pink-glow-caused-by-difference-between-lens-cra-and-sensor-cra/
(2)
http://www.optzmx.com/thread-13809-1-1.html
(3)
高春. CMOS图像传感器微透镜平移算法研究[D].长春理工大学,2018.
(4)
http://www.elecfans.com/d/1262451.html
(5)
https://zhuanlan.zhihu.com/p/37331624
07 后记
关于镜头的CRA以及Sensor的CRA匹配问题简单来说就是越接近越好,设计镜头前就应该考虑到Sensor的一些参数,比如它的像素数、像素大小、CRA曲线、画幅大小以及对不同波长的敏感度曲线。这些都关系到后续整体系统的成像质量。
关于这一部分讲述,笔者学识有限,在撰写过程中可能存在不妥之处,仅供大家参考,切莫奉为圭臬!也欢迎大家指正。
参考:https://mp.weixin.qq.com/s/I14qjs2_2vN5cse5DRPyBA
边栏推荐
猜你喜欢
App regression testing, what are the efficient testing methods?
IEEE的论文哪里可以下载?
![[C language] First understanding of pointers](/img/f2/3e28381212beabae85b832526808d2.png)
[C language] First understanding of pointers
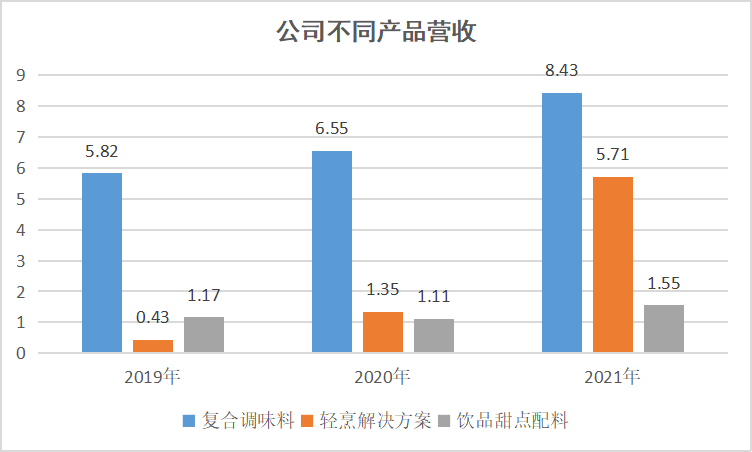
给肯德基打工的调料商,年赚两亿
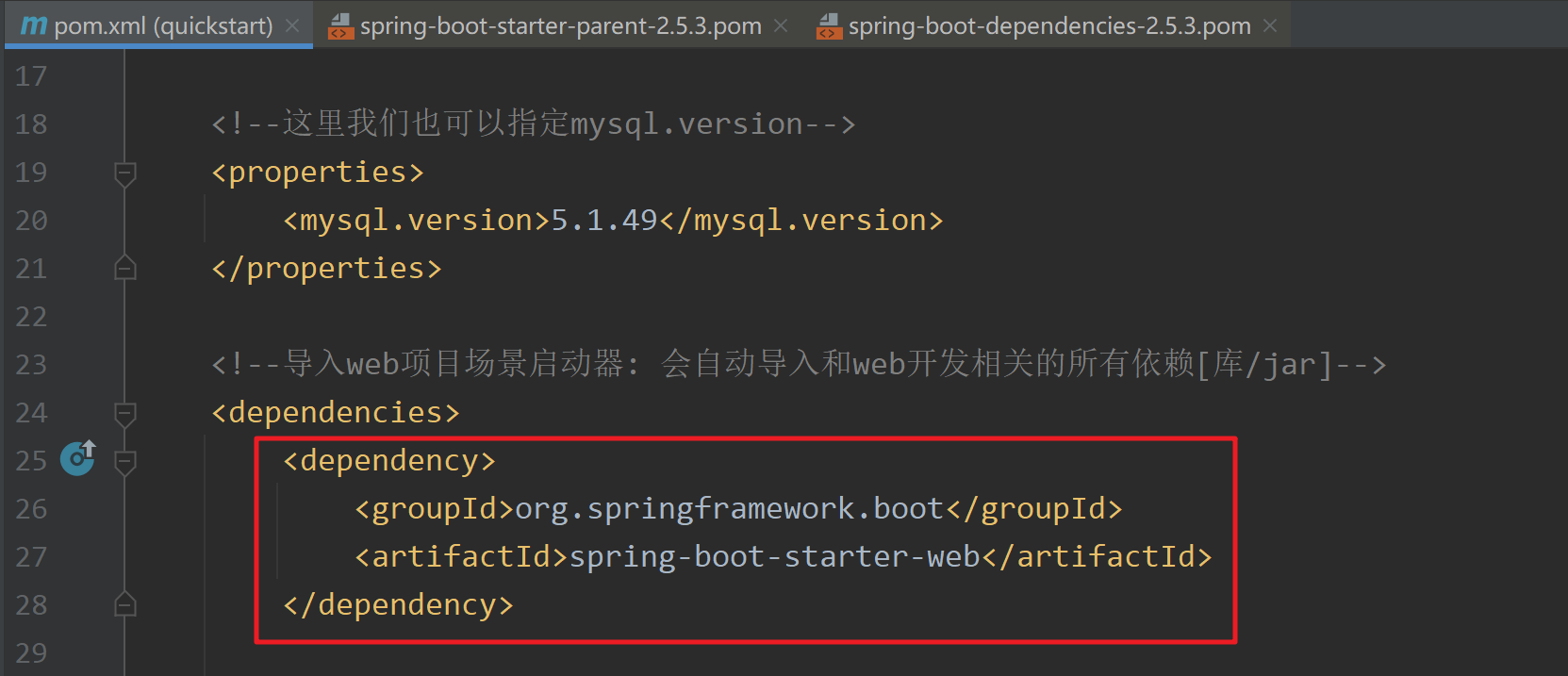
2. 依赖管理和自动配置

iNFTnews | In the Web3 era, users will have data autonomy
C3604环保黄铜带
2. Dependency management and automatic configuration
![[Excel知识技能] 将“假“日期转为“真“日期格式](/img/96/ece9c3885fd4abe4bf4d211813b9c4.png)
[Excel知识技能] 将“假“日期转为“真“日期格式

15. 拦截器-HandlerInterceptor
随机推荐
7. yaml
花环灯问题
SQL injection base - order by injection, limit, wide byte
【C语言】C语言程序设计:动态通讯录(顺序表实现)
Deep Learning Transformer Architecture Analysis
HGAME 2022 Final writeup
Design and Realization of Employment Management System in Colleges and Universities
高性能MySQL核心整理强势来袭
如何快速把握行业机会,更高效地推陈出新,是一个重要的命题
2. Dependency management and automatic configuration
How to recover deleted files from the recycle bin, two methods of recovering files from the recycle bin
Doris建表注意事项,实时数仓的同学记得收藏
给肯德基打工的调料商,年赚两亿
ROS实验笔记之——UZH-FPV数据集的验证
CDN原理与应用简要介绍
有哪些可以投稿软件工程/系统软件/程序设计语言类外文期刊、会议?
CF1286E-Fedya the Potter Strikes Back【KMP,RMQ】
Mathematical modeling preparation knowledge
VR全景+安全科普教育,让学生们提高安全意识
oai 采样频率计算