当前位置:网站首页>IPC:Interrupts and Signals
IPC:Interrupts and Signals
2022-08-10 15:04:00 【51CTO】
In this section will look at ways in which two processes can communicate. When a process terminates abnormally it usually tries to send a signal indicating what went wrong. C programs (and UNIX) can trap these for diagnostics. Also user specified communication can take place in this way.
Signals are software generated interrupts that are sent to a process when a event happens. Signals can be synchronously generated by an error in an application, such as SIGFPE and SIGSEGV, but most signals are asynchronous. Signals can be posted to a process when the system detects a software event, such as a user entering an interrupt or stop or a kill request from another process. Signals can also be come directly from the OS kernel when a hardware event such as a bus error or an illegal instruction is encountered. The system defines a set of signals that can be posted to a process. Signal delivery is analogous to hardware interrupts in that a signal can be blocked from being delivered in the future. Most signals cause termination of the receiving process if no action is taken by the process in response to the signal. Some signals stop the receiving process and other signals can be ignored. Each signal has a default action which is one of the following:
- The signal is discarded after being received
- The process is terminated after the signal is received
- A core file is written, then the process is terminated
- Stop the process after the signal is received
Each signal defined by the system falls into one of five classes:
- Hardware conditions
- Software conditions
- Input/output notification
- Process control
- Resource control
Macros are defined in <signal.h>
These include:
SIGHUP 1 /* hangup */ | SIGINT 2 /* interrupt */ |
SIGQUIT 3 /* quit */ | SIGILL 4 /* illegal instruction */ |
SIGABRT 6 /* used by abort */ | SIGKILL 9 /* hard kill */ |
SIGALRM 14 /* alarm clock */ | |
SIGCONT 19 /* continue a stopped process */ | |
SIGCHLD 20 /* to parent on child stop or exit */ | |
Signals can be numbered from 0 to 31.
Sending Signals -- kill(), raise()
There are two common functions used to send signals
int kill(int pid, int signal) - a system call that send a signal to a process, pid. If pid is greater than zero, the signal is sent to the process whose process ID is equal to pid. If pid is 0, the signal is sent to all processes, except system processes.
kill() returns 0 for a successful call, -1 otherwise and sets errno
int raise(int sig) sends the signal sig to the executing program. raise() actually uses kill()
kill(getpid(), sig);
There is also a UNIX command called kill that can be used to send signals from the command line - see man
NOTE: that unless caught or ignored, the kill
Only processes with certain access privileges can be killed off.
Basic rule: only processes that have the same user can send/receive messages.
The SIGKILL
For examplekill(getpid(),SIGINT);
This would have a similar effect to exit() command. Also ctrl-c typed from the command sends a SIGINT
unsigned int alarm(unsigned int seconds) -- sends the signal SIGALRM
Signal Handling -- signal()
An application program can specify a function called a signal handler to be invoked when a specific signal is received. When a signal handler is invoked on receipt of a signal, it is said to catch the signal. A process can deal with a signal in one of the following ways:
- The process can let the default action happen
- The process can block the signal (some signals cannot be ignored)
- the process can catch the signal with a handler.
Signal handlers usually execute on the current stack of the process. This lets the signal handler return to the point that execution was interrupted in the process. This can be changed on a per-signal basis so that a signal handler executes on a special stack. If a process must resume in a different context than the interrupted one, it must restore the previous context itself
Receiving signals is straighforward with the function:
int (*signal(int sig, void (*func)()))() -- that is to say the function signal() will call the func functions if the process receives a signal sig. Signal returns a pointer to function func if successful or it returns an error to errno
func()
SIG_DFL
SID_DFL(), which will terminate the process upon receipt of sig. SIG_IGN
SIG_IGN() which will disregard the sig action ( UNLESS it is SIGKILL). A function address
-- a user specified function.
SIG_DFL and SIG_IGN are defined in signal.h
Thus to ignore a ctrl-c
signal(SIGINT, SIG_IGN);
TO reset system so that SIGINT
signal(SIGINT, SIG_DFL);
So lets write a program to trap a ctrl-c but not quit on this signal. We have a function sigproc() that is executed when we trap a ctrl-c. We will also set another function to quit the program if it traps the SIGQUIT
#include <stdio.h> void sigproc(void); void quitproc(void); main() { signal(SIGINT, sigproc); signal(SIGQUIT, quitproc); printf(``ctrl-c disabled use ctrl-
to quit
n'');
for(;;); /* infinite loop */} void sigproc() { signal(SIGINT, sigproc); /* */ /* NOTE some versions of UNIX will reset signal to default after each call. So for portability reset signal each time */ printf(``you have pressed ctrl-c
n'');
} void quitproc() { printf(``ctrl-
pressed to quit
n'');
exit(0); /* normal exit status */ }
sig_talk.c
Let us now write a program that communicates between child and parent processes using kill() and signal().
fork() creates the child process from the parent. The pid
The parent can then send messages to child using the pid and kill().
The child picks up these signals with signal()
An example of communicating process using signals is sig_talk.c:
/* sig_talk.c --- Example of how 2 processes can talk *//* to each other using kill() and signal() */ /* We will fork() 2 process and let the parent send a few */ /* signals to it`s child */ /* cc sig_talk.c -o sig_talk */ #include <stdio.h> #include <signal.h> void sighup(); /* routines child will call upon sigtrap */ void sigint(); void sigquit(); main() { int pid; /* get child process */ if ((pid = fork()) < 0) { perror("fork"); exit(1); } if (pid == 0) { /* child */ signal(SIGHUP,sighup); /* set function calls */ signal(SIGINT,sigint); signal(SIGQUIT, sigquit); for(;;); /* loop for ever */ } else /* parent */ { /* pid hold id of child */ printf("/nPARENT: sending SIGHUP/n/n"); kill(pid,SIGHUP); sleep(3); /* pause for 3 secs */ printf("/nPARENT: sending SIGINT/n/n"); kill(pid,SIGINT); sleep(3); /* pause for 3 secs */ printf("/nPARENT: sending SIGQUIT/n/n"); kill(pid,SIGQUIT); sleep(3); } } void sighup() { signal(SIGHUP,sighup); /* reset signal */ printf("CHILD: I have received a SIGHUP/n"); } void sigint() { signal(SIGINT,sigint); /* reset signal */ printf("CHILD: I have received a SIGINT/n"); } void sigquit() { printf("My DADDY has Killed me!!!/n"); exit(0); }
Other signal functions
There are a few other functions defined in signal.h:
int sighold(int sig) -- adds sig
int sigrelse(int sig) -- removes sig
int sigignore(int sig) -- sets the disposition of sig to SIG_IGN
int sigpause(int sig) -- removes sig
边栏推荐
猜你喜欢
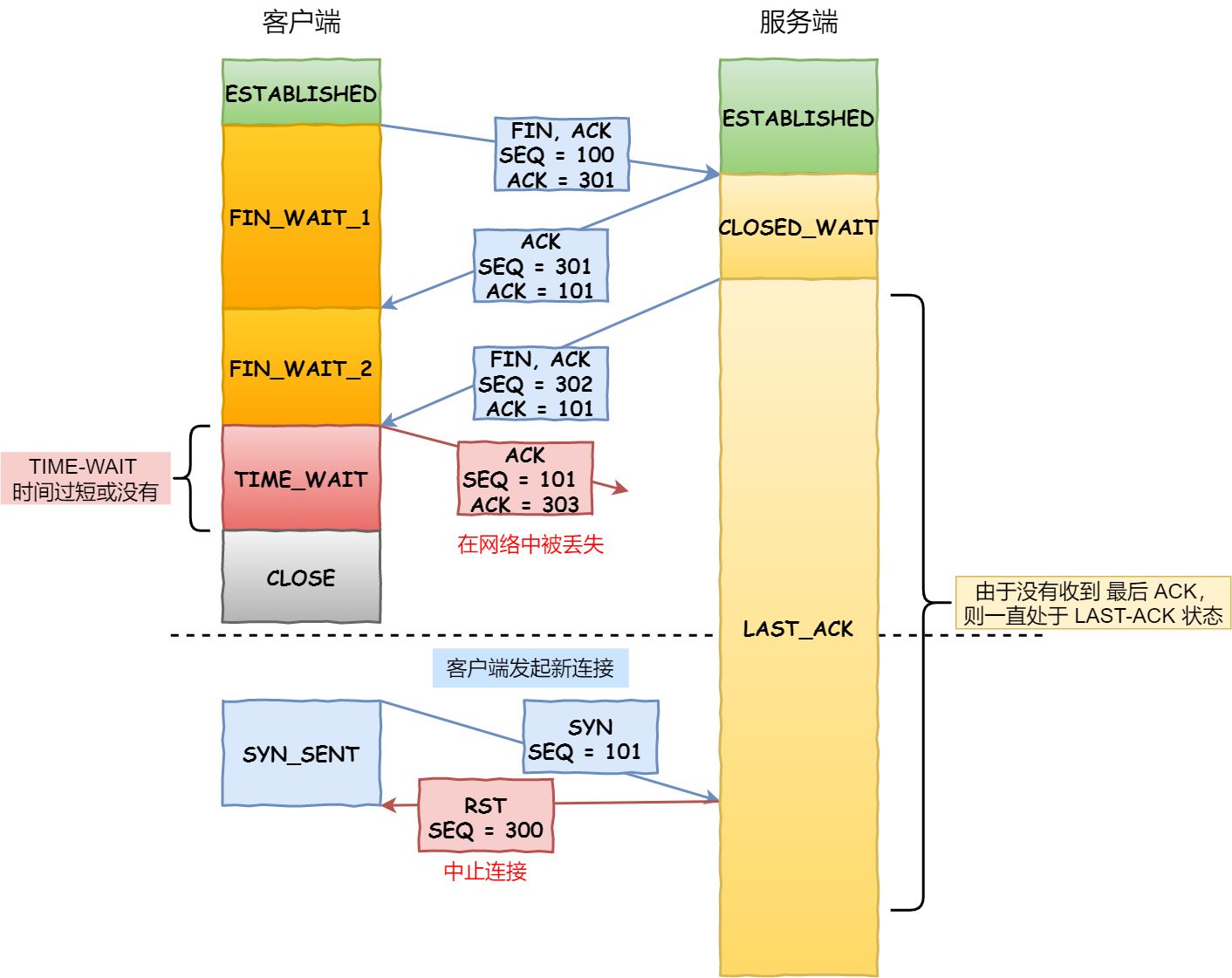
TCP为什么是三次握手和四次挥手?
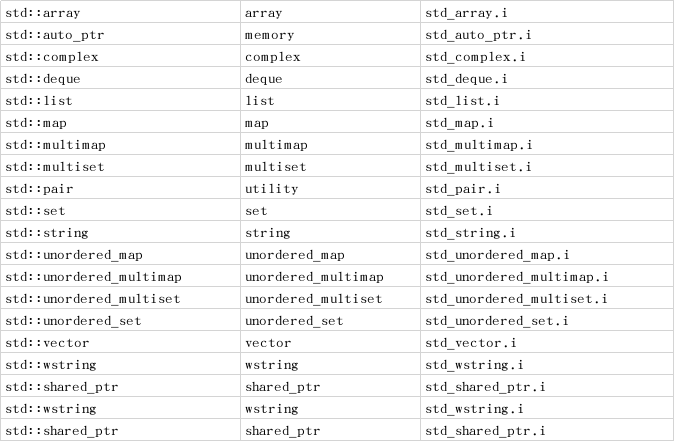
SWIG教程《一》
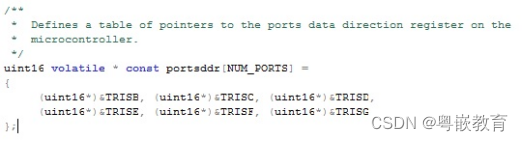
嵌入式开发:嵌入式基础——使用指针数组映射外设
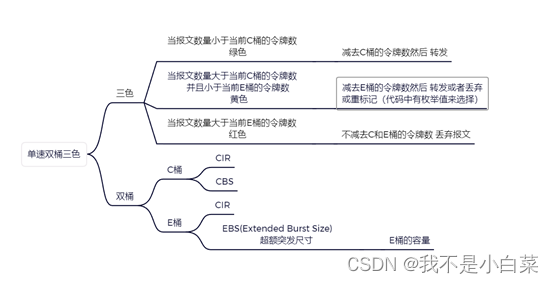
QOS function introduction
fastposter v2.9.1 程序员必备海报生成器
Parse the value of uuid using ABAP regular expressions
【语义分割】DeepLab系列
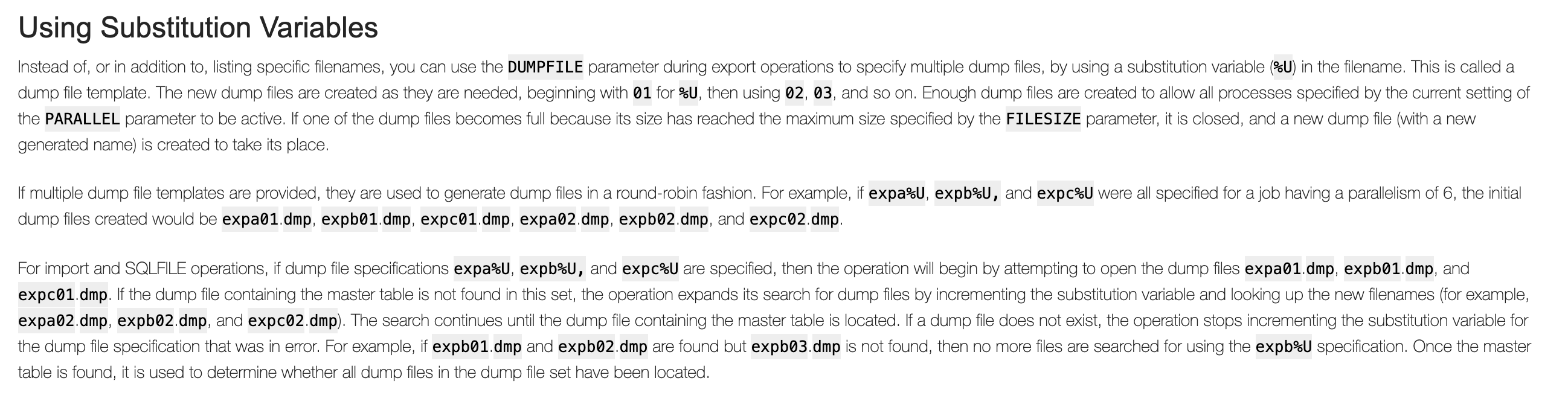
Oracle database backup DMP file is too big, what method can be split into multiple DMP when backup?
A Sina Weibo semantic sentiment analysis tool developed by ABAP
Allwinner V853 development board transplants LVGL-based 2048 games
随机推荐
异地多活方法论
NFT digital collection development issue - digital collection platform
Mini Program-Voice broadcast function
Pagoda panel open Redis to specify the network machine
电商秒杀项目收获(二)
Redis -- Nosql
数字藏品平台系统开发实战
Network engineer's backpack (EDC summary recommendation)
持续集成实战 —— Jenkins自动化测试环境搭建
photoshop入门教程
Programmer = overtime??- Master the time to master the life
格式化输出当前时间
TestLink Export Use Case Transformation Tool
产品说明丨如何使用MobPush快速创建应用
$'\r': command not found
HUAWEI CLOUD DevCloud received the highest-level certification of the first batch of cloud-native technology architecture maturity assessments by the China Academy of Information and Communications Te
How to code like a pro in 2022 and avoid If-Else
scala集合
Based on Azuki Series: NFT Valuation Analysis Framework "DRIC"
E. Cross Swapping(并查集变形/好题)