当前位置:网站首页>Analysis of fixed point PID code of FOC motor Library
Analysis of fixed point PID code of FOC motor Library
2022-04-23 06:47:00 【tilblackout】
Code from STM32 FOC Motor Library in pid_regulator.c.
PID Structure
typedef struct PID_Handle
{
int16_t hDefKpGain; /**< Default @f$K_{pg}@f$ gain */
int16_t hDefKiGain; /**< Default @f$K_{ig}@f$ gain */
int16_t hKpGain; /**< @f$K_{pg}@f$ gain used by PID component */
int16_t hKiGain; /**< @f$K_{ig}@f$ gain used by PID component */
int32_t wIntegralTerm; /**< integral term */
int32_t wUpperIntegralLimit; /**< Upper limit used to saturate the integral
term given by @f$\frac{K_{ig}}{K_{id}} @f$ * integral of
process variable error */
int32_t wLowerIntegralLimit; /**< Lower limit used to saturate the integral
term given by Ki / Ki divisor * integral of
process variable error */
int16_t hUpperOutputLimit; /**< Upper limit used to saturate the PI output */
int16_t hLowerOutputLimit; /**< Lower limit used to saturate the PI output */
uint16_t hKpDivisor; /**< Kp gain divisor, used in conjuction with
Kp gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKiDivisor; /**< Ki gain divisor, used in conjuction with
Ki gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKpDivisorPOW2; /**< Kp gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
uint16_t hKiDivisorPOW2; /**< Ki gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
int16_t hDefKdGain; /**< Default Kd gain */
int16_t hKdGain; /**< Kd gain used by PID component */
uint16_t hKdDivisor; /**< Kd gain divisor, used in conjuction with
Kd gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKdDivisorPOW2; /*!< Kd gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
int32_t wPrevProcessVarError; /*!< previous process variable used by the
derivative part of the PID component */
} PID_Handle_t;- The beginning of variable naming :h Express half word,w Express word.
(1)hKpGain、hKiGain、hKdGain
- Code used in PID Gain parameters
(2)hDefKpGain、hDefKiGain、hDefKdGain
- Default PID Gain settings , Set to... During motor initialization hKpGain、hKiGain、hKdGain. I don't think it's necessary to use these three variables , The old version of ST The motor library does not have these parameters .
(3)wIntegralTerm
- Integral term
(4)wPrevProcessVarError
- The error of each time the differential term needs to be recorded
(5)wUpperIntegralLimit、wLowerIntegralLimit
- The maximum limit of the integral term 、 The minimum value of the integral term is limited
(6)hUpperOutputLimit、hLowerOutputLimit
- PID Maximum output limit 、PID Output minimum limit
(7)hKpDivisor、hKiDivisor、hKdDivisor
- PID The gain parameter of should be decimal , And fixed point PID The gain of is an integer , You need to divide by a ratio
(8)hKpDivisorPOW2、hKiDivisorPOW2、hKdDivisorPOW2
- CPU The efficiency of division is not very high , So the top PID The divisor of the gain is generally set to
 , Corresponding
, Corresponding  , This shifts arithmetic right in the code , This greatly improves the operation speed .
, This shifts arithmetic right in the code , This greatly improves the operation speed .
 , Corresponding
, Corresponding  , This shifts arithmetic right in the code , This greatly improves the operation speed .
, This shifts arithmetic right in the code , This greatly improves the operation speed .PID Function implementation
Some controls do not require differential terms , therefore ST take PID Functions are divided into PI Control functions and PID Control function . The code is simple , Please refer to the notes for details .
PI Control function
__weak int16_t PI_Controller( PID_Handle_t * pHandle, int32_t wProcessVarError )
{
int32_t wProportional_Term, wIntegral_Term, wOutput_32, wIntegral_sum_temp;
int32_t wDischarge = 0;
int16_t hUpperOutputLimit = pHandle->hUpperOutputLimit;
int16_t hLowerOutputLimit = pHandle->hLowerOutputLimit;
/* Calculate the proportional term */
wProportional_Term = pHandle->hKpGain * wProcessVarError;
/* Calculate the integral term */
if ( pHandle->hKiGain == 0 )
{
/* The integral gain is 0, Clear the previous integral term */
pHandle->wIntegralTerm = 0;
}
else
{
/* Integral gain is not 0, Calculate the integral of this error */
wIntegral_Term = pHandle->hKiGain * wProcessVarError;
/* Add the points accumulated before */
wIntegral_sum_temp = pHandle->wIntegralTerm + wIntegral_Term;
/* Judgment overflows */
if ( wIntegral_sum_temp < 0 )
{
if ( pHandle->wIntegralTerm > 0 )
{
if ( wIntegral_Term > 0 )
{
/* If this integral and the previous integral are positive , Its sum is less than 0, It means more than INT32_MAX */
wIntegral_sum_temp = INT32_MAX;
}
}
}
else
{
if ( pHandle->wIntegralTerm < 0 )
{
if ( wIntegral_Term < 0 )
{
/* If this integral and the previous integral are negative , Its sum is greater than 0, It means more than -INT32_MAX */
wIntegral_sum_temp = -INT32_MAX;
}
}
}
/* Judge whether the user-defined integral limit is exceeded */
if ( wIntegral_sum_temp > pHandle->wUpperIntegralLimit )
{
pHandle->wIntegralTerm = pHandle->wUpperIntegralLimit;
}
else if ( wIntegral_sum_temp < pHandle->wLowerIntegralLimit )
{
pHandle->wIntegralTerm = pHandle->wLowerIntegralLimit;
}
else
{
pHandle->wIntegralTerm = wIntegral_sum_temp;
}
}
/* Fixed point PID, You need to divide by a ratio */
#ifdef FULL_MISRA_C_COMPLIANCY
wOutput_32 = ( wProportional_Term / ( int32_t )pHandle->hKpDivisor ) + ( pHandle->wIntegralTerm /
( int32_t )pHandle->hKiDivisor );
#else
/* You need to ensure that the compiler processes this line of code by arithmetic shift right , Not logical shift right */
wOutput_32 = ( wProportional_Term >> pHandle->hKpDivisorPOW2 ) + ( pHandle->wIntegralTerm >> pHandle->hKiDivisorPOW2 );
#endif
/* Judge PID Whether the output result exceeds the user-defined range */
if ( wOutput_32 > hUpperOutputLimit )
{
/* Exceeds the user-defined maximum range , Assign the value exceeded this time to wDischarge */
wDischarge = hUpperOutputLimit - wOutput_32;
wOutput_32 = hUpperOutputLimit;
}
else if ( wOutput_32 < hLowerOutputLimit )
{
/* Exceeds the user-defined minimum range , Assign the value exceeded this time to wDischarge */
wDischarge = hLowerOutputLimit - wOutput_32;
wOutput_32 = hLowerOutputLimit;
}
else { /* Nothing to do here */ }
/* take wDischarge Assign to the integral term , For the next calculation */
pHandle->wIntegralTerm += wDischarge;
return ( ( int16_t )( wOutput_32 ) );
}PID Control function
__weak int16_t PID_Controller( PID_Handle_t * pHandle, int32_t wProcessVarError )
{
int32_t wDifferential_Term;
int32_t wDeltaError;
int32_t wTemp_output;
if ( pHandle->hKdGain != 0 ) /* derivative terms not used */
{
/* The integral term calculates the difference between this error and the last error */
wDeltaError = wProcessVarError - pHandle->wPrevProcessVarError;
/* Calculate the differential term */
wDifferential_Term = pHandle->hKdGain * wDeltaError;
#ifdef FULL_MISRA_C_COMPLIANCY
wDifferential_Term /= ( int32_t )pHandle->hKdDivisor;
#else
/* WARNING: the below instruction is not MISRA compliant, user should verify
that Cortex-M3 assembly instruction ASR (arithmetic shift right)
is used by the compiler to perform the shifts (instead of LSR
logical shift right)*/
/* Fixed point PID, You need to divide by a ratio */
wDifferential_Term >>= pHandle->hKdDivisorPOW2;
#endif
/* Record the differential term of this time */
pHandle->wPrevProcessVarError = wProcessVarError;
/* Calculate the proportional term and integral term , Plus the differential term as the output */
wTemp_output = PI_Controller( pHandle, wProcessVarError ) + wDifferential_Term;
/* User defined scope limits */
if ( wTemp_output > pHandle->hUpperOutputLimit )
{
wTemp_output = pHandle->hUpperOutputLimit;
}
else if ( wTemp_output < pHandle->hLowerOutputLimit )
{
wTemp_output = pHandle->hLowerOutputLimit;
}
else
{}
}
else
{
/* The differential gain is 0, Only the proportional and integral terms are calculated */
wTemp_output = PI_Controller( pHandle, wProcessVarError );
}
return ( ( int16_t ) wTemp_output );
}Parameter adjustment
You should adjust the inner ring first and then the outer ring . Here's a fixed point PID Actually, it should be adjusted first hKxDivisorPOW2 Size , If you don't adjust the division term well, adjust PID The gain of , How to adjust the parameters? Finally PID The output overflows .
版权声明
本文为[tilblackout]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230549282784.html
边栏推荐
- Vs can be compiled, but there will be a red underline to indicate the problem of undefined identifiers
- 卷积神经网络实现CIFAR100数据集分类
- 查漏补缺(四)
- [stepping on the pit] MELD in win11 wsl2 cannot be used normally. Problem repair
- Shell脚本 &&和||的使用
- ROS包nmea_navsat_driver读取GPS、北斗定位信息笔记
- Collection of practical tips for C language (continuously updated)
- VHDL finite state machine (FSM) code example
- HDU-Tunnel Warfare
- JS中 t, _ => 的解析
猜你喜欢
![[UDS unified diagnosis service] IV. typical diagnosis service (1) - diagnosis and communication management function unit](/img/4f/7ca6505b545fb825b0dba36f474da7.png)
[UDS unified diagnosis service] IV. typical diagnosis service (1) - diagnosis and communication management function unit

CUDA project encountered a series of compilation problems after changing the environment (computer)

QT icon application
锚点定位——如何设置锚点居页面顶部距离,锚点定位并距离顶部一定偏移
VHDL-任意分频器(50%占空比)
js获取链接?后边的参数名称或者值,根据url ?后的参数做判断
![微信小程序之点击取消,返回上页,修改上页的参数值,let pages=getCurrentPages() let prevPage=pages[pages.length - 2] // 上一页的数据](/img/ed/4d61ce34f830209f5adbddf9165676.png)
微信小程序之点击取消,返回上页,修改上页的参数值,let pages=getCurrentPages() let prevPage=pages[pages.length - 2] // 上一页的数据
Qt 添加QSerialPort类 实现串口操作
![C [document operation] PDF files and pictures are converted to each other](/img/6b/0742aa3eb45fbca091d6d20bc55326.png)
C [document operation] PDF files and pictures are converted to each other
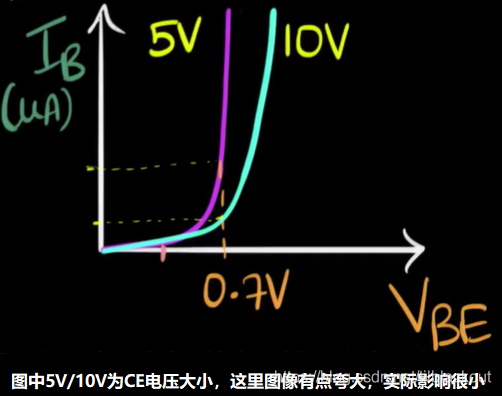
三极管原理及特性分析

随机推荐
MOS tube characteristics and conduction process
Generate shortcut
FOC single resistance sampling position loop control servo motor
VHDL 有限状态机(FSM) 代码示例
el-form表单多重循环校验
Declared as a global variable
Qt 添加QSerialPort类 实现串口操作
约瑟夫序列 线段树 O(nlogn)
Shell脚本的通配符和特殊符号
C language code specification
查漏补缺(八)
Node数据流
[UDS unified diagnostic service] IV. typical diagnostic service (2) - data transmission function unit
Quaternion multiplication
基于TensorFlow的线性回归实例
SSH 公钥 私钥的理解
js获取链接?后边的参数名称或者值,根据url ?后的参数做判断
Detailed explanation and application of PN junction and diode principle
监听除某元素之外点击事件
HDU-Memory Control