SC_Depth_pl:
This is a pytorch lightning implementation of SC-Depth (V1, V2) for self-supervised learning of monocular depth from video.
In the V1 (IJCV 2021 & NeurIPS 2019), we propose (i) geometry consistency loss for scale-consistent depth prediction over video and (ii) self-discovered mask for detecting and removing dynamic regions during training towards higher accuracy. We also validate the predicted depth in the Visual SLAM scenario.
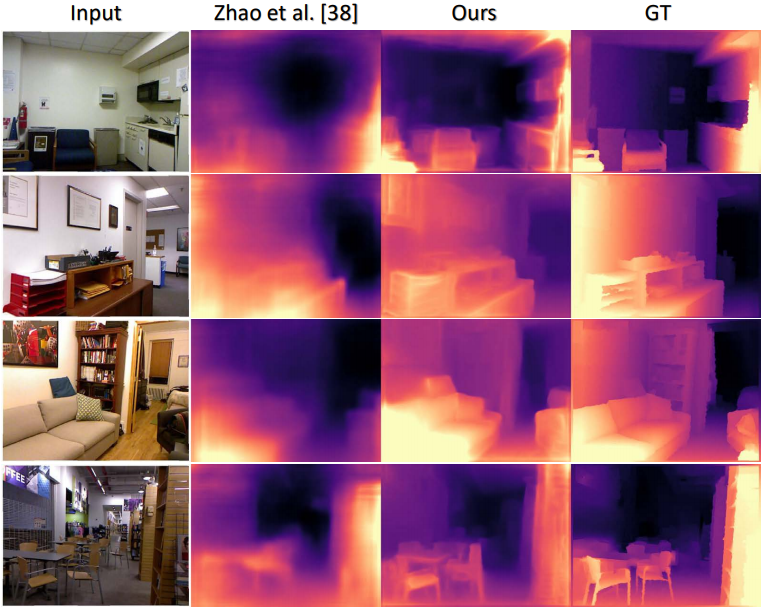
In the V2 (TPMAI 2022), we propose auto-recitify network (ARN) to remove relative image rotation in hand-held camera captured videos, e.g., some indoor datasets. We show that the proposed ARN, which is self-supervised trained in an end-to-end fashion, greatly eases the training and significantly boosts the performance.
Install
conda create -n sc_depth_env python=3.6
conda activate sc_depth_env
conda install pytorch==1.6.0 torchvision==0.7.0 cudatoolkit=10.2 -c pytorch
pip install -r requirements.txt
Dataset
We preprocess all existing video datasets to the following general video format for training and testing:
Dataset
-Training
--Scene0000
---*.jpg (list of images)
---cam.txt (3x3 intrinsic)
---depth (a folder containing gt depths, optional for validation)
--Scene0001
...
train.txt (containing training scene names)
val.txt (containing validation scene names)
-Testing
--color (containg testing images)
--depth (containg ground truth depths)
You can convert it by yourself (on your own video data) or download our pre-processed standard datasets:
Training
We provide "scripts/run_train.sh", which shows how to train on kitti and nyu.
Testing
We provide "scripts/run_test.sh", which shows how test on kitti and nyu.
Inference
We provide "scripts/run_inference.sh", which shows how to save depths (.npy) and visualization results (.jpg).
Pretrained models
We provide pretrained models on kitti and nyu datasets. You need to uncompress it and put it into "ckpt" folder. If you run the "scripts/run_test.sh" with the pretrained model (fix the path before running), you should get the following results:
| Models | Abs Rel | Sq Rel | Log10 | RMSE | RMSE(log) | Acc.1 | Acc.2 | Acc.3 |
|---|---|---|---|---|---|---|---|---|
| resnet18 | 0.119 | 0.878 | 0.053 | 4.987 | 0.196 | 0.859 | 0.956 | 0.981 |
| Models | Abs Rel | Sq Rel | Log10 | RMSE | RMSE(log) | Acc.1 | Acc.2 | Acc.3 |
|---|---|---|---|---|---|---|---|---|
| resnet18 | 0.142 | 0.112 | 0.061 | 0.554 | 0.186 | 0.808 | 0.951 | 0.987 |
References
SC-DepthV1:
Unsupervised Scale-consistent Depth Learning from Video (IJCV 2021)
Jia-Wang Bian, Huangying Zhan, Naiyan Wang, Zhichao Li, Le Zhang, Chunhua Shen, Ming-Ming Cheng, Ian Reid [paper]
@article{bian2021ijcv,
title={Unsupervised Scale-consistent Depth Learning from Video},
author={Bian, Jia-Wang and Zhan, Huangying and Wang, Naiyan and Li, Zhichao and Zhang, Le and Shen, Chunhua and Cheng, Ming-Ming and Reid, Ian},
journal= {International Journal of Computer Vision (IJCV)},
year={2021}
}
which is an extension of previous conference version: Unsupervised Scale-consistent Depth and Ego-motion Learning from Monocular Video (NeurIPS 2019)
Jia-Wang Bian, Zhichao Li, Naiyan Wang, Huangying Zhan, Chunhua Shen, Ming-Ming Cheng, Ian Reid [paper]
@inproceedings{bian2019neurips,
title={Unsupervised Scale-consistent Depth and Ego-motion Learning from Monocular Video},
author={Bian, Jiawang and Li, Zhichao and Wang, Naiyan and Zhan, Huangying and Shen, Chunhua and Cheng, Ming-Ming and Reid, Ian},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
year={2019}
}
SC-DepthV2:
Auto-Rectify Network for Unsupervised Indoor Depth Estimation (TPAMI 2022)
Jia-Wang Bian, Huangying Zhan, Naiyan Wang, Tat-Jun Chin, Chunhua Shen, Ian Reid [paper]
@article{bian2021tpami,
title={Auto-Rectify Network for Unsupervised Indoor Depth Estimation},
author={Bian, Jia-Wang and Zhan, Huangying and Wang, Naiyan and Chin, Tat-Jin and Shen, Chunhua and Reid, Ian},
journal= {IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)},
year={2021}
}

 502 Jan 08, 2023
502 Jan 08, 2023
 1 Mar 07, 2022
1 Mar 07, 2022
 30 Dec 14, 2022
30 Dec 14, 2022
 1 Jan 04, 2022
1 Jan 04, 2022
 205 Jan 02, 2023
205 Jan 02, 2023
 34 Jan 04, 2023
34 Jan 04, 2023
 159 Dec 28, 2022
159 Dec 28, 2022
 35 Dec 28, 2022
35 Dec 28, 2022
 203 Jun 19, 2022
203 Jun 19, 2022
 397 Dec 30, 2022
397 Dec 30, 2022
 69 Dec 27, 2022
69 Dec 27, 2022
 4.5k Jan 07, 2023
4.5k Jan 07, 2023
 160 Sep 20, 2022
160 Sep 20, 2022
 44 Dec 06, 2022
44 Dec 06, 2022
 8 Nov 14, 2022
8 Nov 14, 2022
 12 Dec 02, 2022
12 Dec 02, 2022
 1 Dec 17, 2021
1 Dec 17, 2021
 0 Feb 22, 2022
0 Feb 22, 2022
 2 Aug 02, 2022
2 Aug 02, 2022
 24 Dec 28, 2022
24 Dec 28, 2022