当前位置:网站首页>舵机内部结及工作原理浅析[通俗易懂]
舵机内部结及工作原理浅析[通俗易懂]
2022-08-10 13:44:00 【全栈程序员站长】
大家好,又见面了,我是你们的朋友全栈君。
一、舵机实物图
就像上面这张照片,相信大家都不会陌生,我们常见到的舵机就是这个模样,一般是塑料外壳,当然很少见的也有金属外壳的舵机,因为涉及到控制信号,所以一般有三条引出线。
像上图所示的样子,舵机有一个三线的接口。黑色线(或棕色线)是接地线,红线接+5V电压,黄线(或是白色或橙色)接控制信号端。(而步进电机一般会有4~6根不等的引出线)
二、舵机的内部结构
各种品牌型号舵机的样子,长的几乎都是差不多的,一般情况下,舵机的输出轴都是偏向一边的,这是由于内部齿轮组的安装方式的原因,如果拆开舵机,我们就会发现更多真相。我们可以很明显的看出,舵机和步进电机的动力是有着很大区别的,舵机的驱动力来自——直流电机,通过变速齿轮的传动和变速,将动力传输到输出轴,同时,舵机内部都设有角度传感器和控制电路板,用来参与舵机的转动角度的控制和信号的反馈检测工作。
如果还不够直观的话,我们再来看一张舵机实物的拆解图,你就不用再拆了,因为拆了也是一样的内部构造。
三、舵机的闭环检测机制
关于舵机的精准位置控制,存在以下如下图的闭环控制机制。即:位置检测器(角度传感器)是它的输入传感器,舵机转动的位置变化,位置检测器的电阻值就会跟着变化。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。从而实现了舵机的精确转动的控制。
四、舵机的工作原理
舵机的工作原理可以通过下面这张简单的流程图说明,结合上面所说的闭环检测机制内容,相信你很轻松的就可以了解舵机的工作流程和工作原理了。
说到舵机的控制信号,一般是脉宽调制(PWM)信号,如下图,直观反映了PWM信号和舵机转动角度的关系,你也可以简单的理解为,通过给舵机通电的时间控制,结合角度传感器的反馈信号检测和控制,实现了舵机的精确角度控制。
舵机的控制信号周期为20MS的脉宽调制信号(PWM),其中脉宽从0.5ms-2.5ms,相应的舵盘位置从0-180度,呈线型变化。也就是说,给舵机提供一定的脉宽,他的输出轴就会保持一定的对应角度,无论外接转矩怎么改变,知道给他提供另外一个脉冲信号,他才会改变输出角度到新的对应的位置上。
舵机内部有一个基准电路,产生周期为20MS,宽度为1.5MS的脉冲信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
舵机是一种位置伺服驱动器,转动范围不能超过180度,适用于那些需要不断变化并可以保持的驱动器中,比喻说机器人的关节、飞机的多面等。
注意:舵机的运动范围是180度,我曾经参加了一个教育机器人的比赛,其实就是一个小车加上几个传感器,当时用的PARALLAX的电机,以为PARALLX是舵机,我很疑惑,今天在书上看到舵机的旋转范围是180,180度的话,小车不是只能走半圈?所以之前用的PARALLAX是改造过的伪舵机。
五、180度电机与360度电机
360度舵机与一般舵机的区别是:给一般舵机一个PWM信号,舵机会转到一个特定角度,而给360度舵机一个PWM信号,舵机会以一个特定的速度转动,类似与电机。但与电机不同的是,360舵机是闭环控制,速度控制稳定。
PWM信号与360舵机转速的关系:
0.5ms—————-正向最大转速;
1.5ms—————-速度为0;
2.5ms—————-反向最大转速;
拿到那种360度旋转电机的时候,首先就是调零,接VCC、GND,然后用波形发生器产生一个周期20MS、高电平1.5MS的波形去调零。(经验之谈,不知道对不对)
以上说的不一定都对,各位看官不吝赐教!
发布者:全栈程序员栈长,转载请注明出处:https://javaforall.cn/130034.html原文链接:https://javaforall.cn
边栏推荐
- PHP judges whether the file has content, and if there is no content, copy another file to write
- ICML 2022 | 基于随机注意力机制的可解释可泛化图学习
- A can make large data clustering method of 2000 times faster, don't poke
- Pointer (preliminary solution of C language)
- Cloud Migration Practice of Redis
- The recursive recursive Fighting_ silver study ah but level 4
- 2022年中国软饮料市场洞察
- 第三方软件测评有什么作用?权威软件检测机构推荐
- 用低代码驱动IT现代化
- 【POI 2008, BLO】割点
猜你喜欢
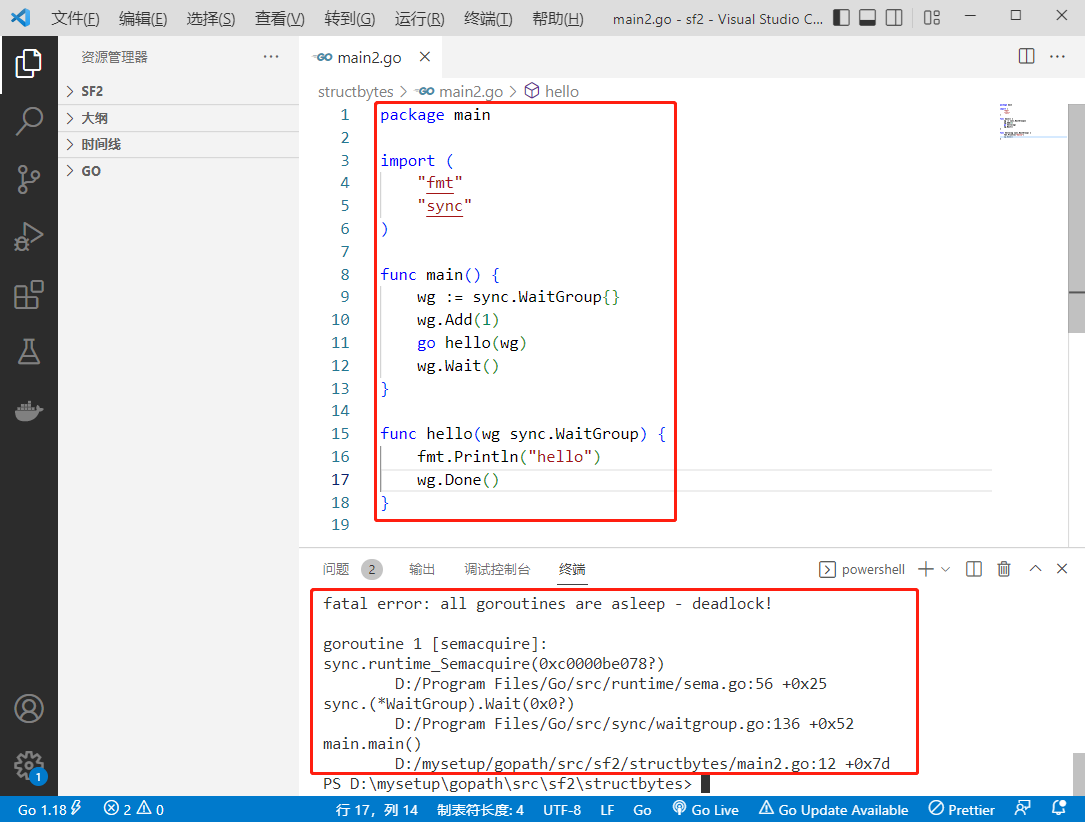
2022-08-09:以下go语言代码输出什么?A:否,会 panic;B:是,能正确运行;C:不清楚,看投票结果。 package main import ( “fmt“ “syn

【Gazebo入门教程】第三讲 SDF文件的静/动态编程建模

第三方软件测评有什么作用?权威软件检测机构推荐

AWS 安全基础知识
Basic knowledge of switches

Efficient and Robust 2D-to-BEV Representation Learning via Geometry-guided Kernel Transformer Paper Notes
Existing in the rain of PFAS chemical poses a threat to the safety of drinking water
Using data intelligence, Amazon cloud technology helps companies build endogenous brand growth
日志@Slf4j介绍使用及配置等级
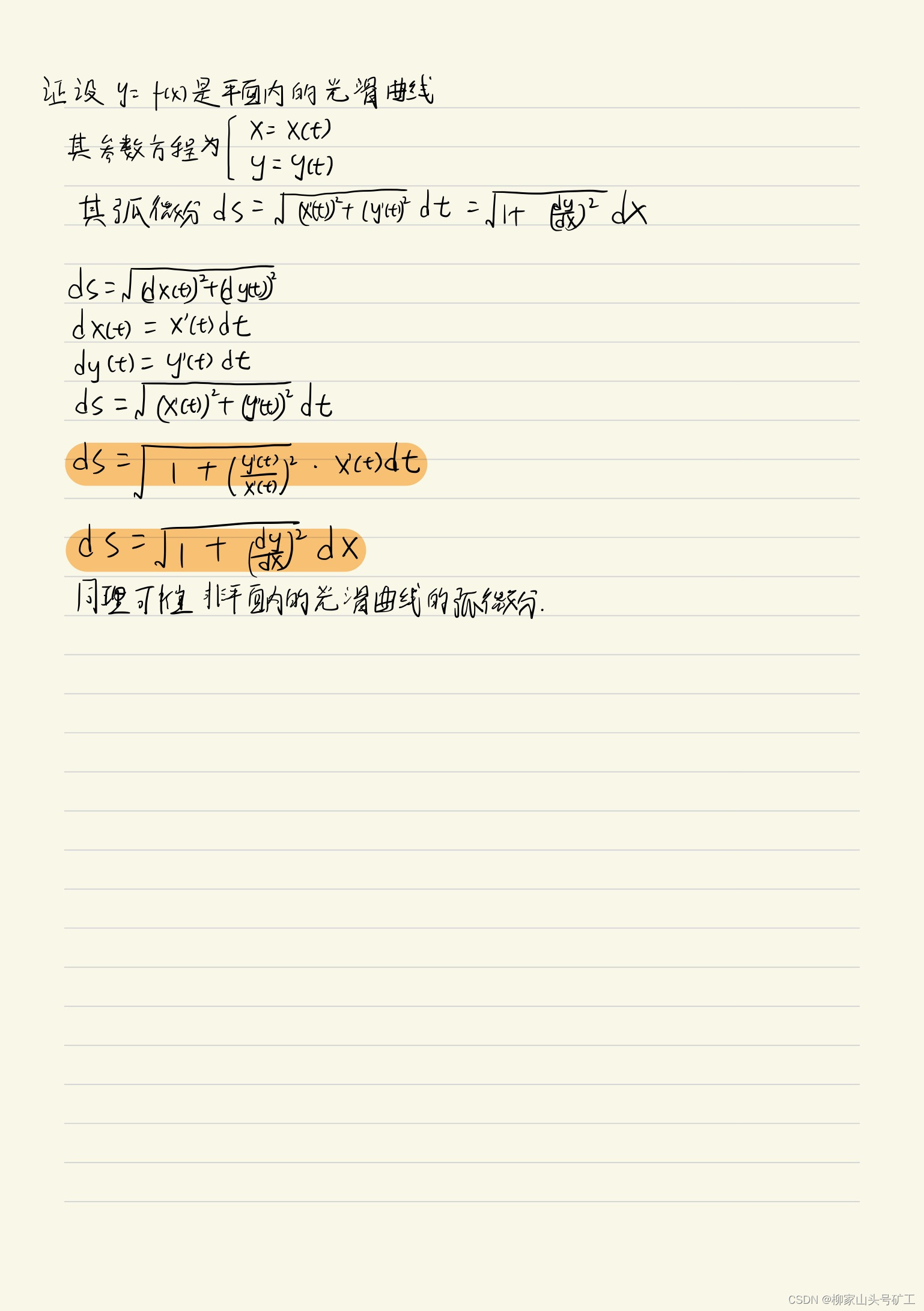
高数_证明_弧微分公式
随机推荐
Error: Rule can only have one resource source (provided resource and test + include + exclude)
需要被记录的OpenStack相关的命令_自己用
d为何用模板参数
Fragment-hide and show
C# 当前上下文中不存在InitializeComponent()
重要通知 | “移动云杯”算力网络应用创新大赛初赛延期!!
Send a post request at the front desk can't get the data
I would like to ask the big guys, how to solve this error when cdc oracle initializes a 3 million table task running
CodeForces - 811A
Import other custom namespaces in C#
Data product manager thing 2
CodeForces-834C
tampercfg内核模块导致机器频繁crash
Cloud Migration Practice of Redis
2012年下半年 系统架构设计师 下午试卷 II
ABAP 里文件操作涉及到中文字符集的问题和解决方案试读版
Calculate the number of combinations recursively
雨水中存在的PFAS化学物质对饮用水安全构成了威胁
Makefile missing separator. Stop.怎么解决「建议收藏」
laravel 抛错给钉钉