当前位置:网站首页>Ptorch classical convolutional neural network lenet
Ptorch classical convolutional neural network lenet
2022-04-23 14:00:00 【Wow, Kaka, negative is positive】
Pytorch Classical convolutional neural network LeNet
0. Introduction to the environment
Environment use Kaggle Built for free in Notebook
The tutorial uses Mr. Li Mu's Hands-on deep learning Website and Video Explanation
Tips : When you don't understand the function, you can press Shift+Tab View function details .
1. LeNet
1.0 brief introduction
LeNet It is one of the earliest convolutional neural networks , Because of its efficient performance in computer vision tasks, it has attracted extensive attention . This model is made up of AT&T Researchers at Bell Labs Yann LeCun stay 1989 Put forward in ( And named after it ), The purpose is to recognize the image [LeCun et al., 1998] Handwritten digits in . at that time ,Yann LeCun Published the first research on successfully training convolutional neural networks through back propagation , This work represents the achievements of neural network research and development in the past ten years .
at that time ,LeNet Achieved with support vector machine (support vector machines) Performance comparable results , Become the mainstream method of supervised learning . LeNet It is widely used in automatic teller machines (ATM) In flight , Help identify numbers that process checks . today , Some ATMs are still running Yann LeCun And his colleagues Leon Bottou In the last century 90 Code written in the era .
Address of thesis :https://axon.cs.byu.edu/~martinez/classes/678/Papers/Convolution_nets.pdf
The handwritten digits MNIST Data sets :
- 50 , 000 50,000 50,000 Training data
- 10 , 000 10,000 10,000 Test data
- Image size 28 × 28 28 \times 28 28×28
- 10 10 10 class ( 0 → 9 ) (0 \to 9) (0→9)
1.2 LeNet structure
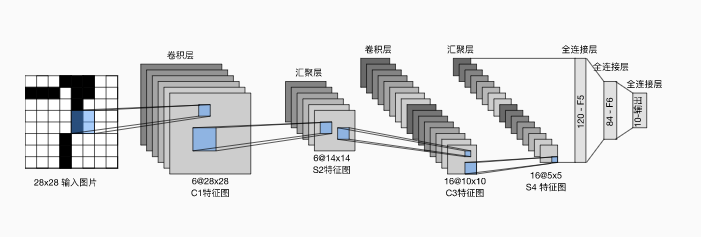
The basic unit in each convolution block is a convolution layer 、 One sigmoid Activation function and average pooling layer .
notes : although ReLU Activating functions and maximizing pooling layers are more effective , But they are 20 century 90 The age has not yet appeared .
Each convolution layer uses 5 × 5 5\times 5 5×5 Convolution kernel and a sigmoid Activation function . These layers map input to multiple 2D feature outputs , Usually increase the number of channels at the same time . The first convolution has 6 6 6 Output channels , The second accretion layer has 16 16 16 Output channels . Use 2 × 2 2\times 2 2×2 The average pooling window reduces the dimension by spatial down sampling 4 times .
First use convolution layer to learn image spatial information , Then use the full connection layer to convert to category space .
2. Code implementation
2.1 Network structure
A small change has been made to the original model , Remove the Gaussian activation of the last layer . besides , This network is different from the original LeNet-5 Agreement .

!pip install -U d2l
import torch
from torch import nn
from d2l import torch as d2l
net = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)

In the whole convolution block , Compared with the previous layer , The height and width of each layer feature are reduced . The first convolution layer uses 2 2 2 Pixel fill , To compensate for the feature reduction caused by convolution kernel . The second accretion layer is not filled , Therefore, the height and width are reduced 4 4 4 Pixel . As the stack rises , The number of channels varies from... At the time of input 1 1 1 individual , Added after the first convolution layer 6 6 6 individual , After the second accretion layer 16 16 16 individual . meanwhile , The height and width of each average pool layer are halved . Last , Each fully connected layer reduces the dimension , Finally, an output whose dimension matches the number of result classifications is output .
2.2 load Fashion-MNIST Data sets
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size)
2.3 Evaluation function
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
""" Use GPU Calculate the accuracy of the model on the dataset """
if isinstance(net, nn.Module):
net.eval() # Set to evaluation mode
if not device:
device = next(iter(net.parameters())).device
# The number of correct predictions , Total forecast quantity
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
# BERT Fine tuning required ( Then we will introduce )
X = [x.to(device) for x in X]
else:
X = X.to(device)
y = y.to(device)
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
2.4 Training functions
#@save
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
""" use GPU Training models ( Define in Chapter 6 )"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
# Use xavier Weight initialization
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# The sum of training losses , The sum of training accuracy , Sample size
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {
train_l:.3f}, train acc {
train_acc:.3f}, '
f'test acc {
test_acc:.3f}')
print(f'{
metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {
str(device)}')
2.5 use CPU Training
stay kaggle in Accelerator Set to None.
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())

Traversal per second 5612.2 5612.2 5612.2 Samples .
2.6 use GPU Training
stay kaggle Use in GPU:


Traversal per second 33873.6 33873.6 33873.6 Samples , It can be found that CPU Training is much faster .
Training set accuracy 0.820 0.820 0.820, Test set accuracy 0.801 0.801 0.801.
2.7 Try to change the activation function to ReLU And changing the pool layer to the maximum pool , Adjust the learning rate
net2 = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.ReLU(),
nn.Linear(120, 84), nn.ReLU(),
nn.Linear(84, 10))
# Learning rate 0.9 Will not converge when , So adjust it to 0.1
lr, num_epochs = 0.1, 10
train_ch6(net2, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
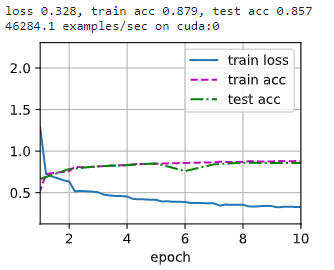
Training set accuracy 0.879 0.879 0.879, Test set accuracy 0.857 0.857 0.857, Compared with the previous model, it is indeed improved .
版权声明
本文为[Wow, Kaka, negative is positive]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231357499134.html
边栏推荐
- Taobao released the baby prompt "your consumer protection deposit is insufficient, and the expiration protection has been started"
- leetcode--380.O(1) 时间插入、删除和获取随机元素
- Tensorflow Download
- groutine
- Express ② (routage)
- STM32 learning record 0007 - new project (based on register version)
- JS force deduction brush question 102 Sequence traversal of binary tree
- Go语言 RPC通讯
- Detailed explanation of redis (Basic + data type + transaction + persistence + publish and subscribe + master-slave replication + sentinel + cache penetration, breakdown and avalanche)
- Basic knowledge learning record
猜你喜欢
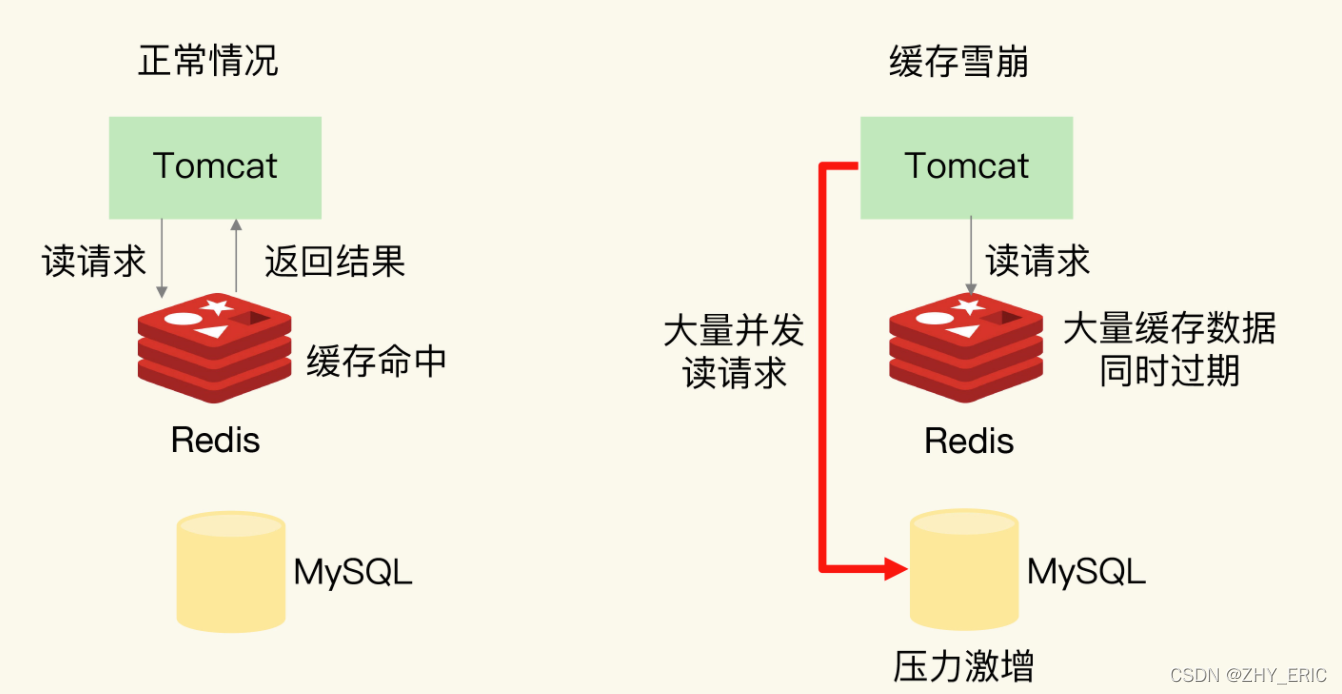
How does redis solve the problems of cache avalanche, cache breakdown and cache penetration

Modify the Jupiter notebook style
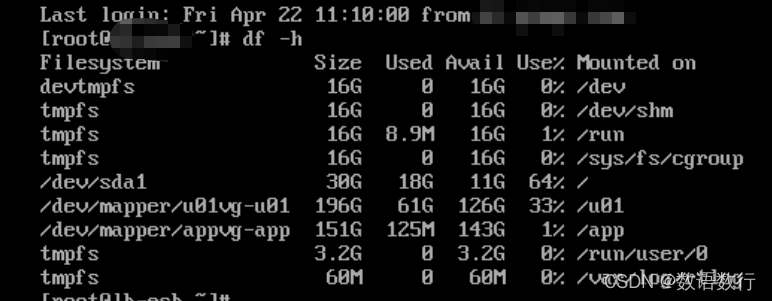
Crontab timing task output generates a large number of mail and runs out of file system inode problem processing
Quartus Prime硬件实验开发(DE2-115板)实验二功能可调综合计时器设计
Program compilation and debugging learning record

Express ② (routing)
![MySQL [acid + isolation level + redo log + undo log]](/img/52/7e04aeeb881c8c000cc9de82032e97.png)
MySQL [acid + isolation level + redo log + undo log]

freeCodeCamp----time_ Calculator exercise
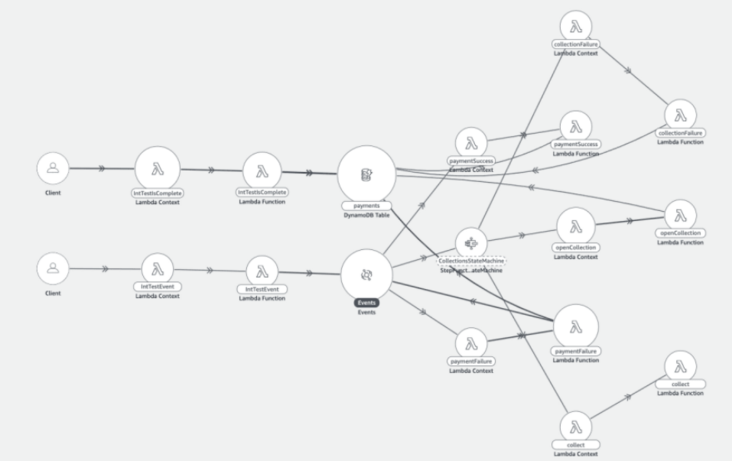
初探 Lambda Powertools TypeScript
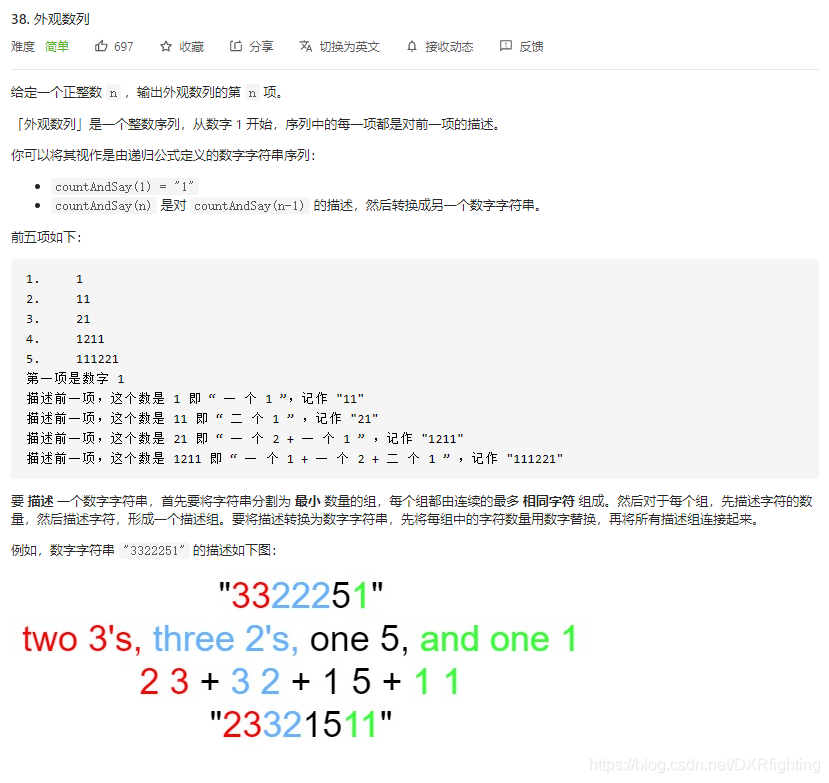
Leetcode | 38 appearance array
随机推荐
Program compilation and debugging learning record
JS force deduction brush question 103 Zigzag sequence traversal of binary tree
Building MySQL environment under Ubuntu & getting to know SQL
2021年秋招,薪资排行NO
Redis docker 安装
容差分析相关的计算公式
Small case of web login (including verification code login)
金蝶云星空API调用实践
[code analysis (3)] communication efficient learning of deep networks from decentralized data
STM32 learning record 0007 - new project (based on register version)
Technologie zéro copie
Modify the Jupiter notebook style
Jenkins construction and use
What is the difference between blue-green publishing, rolling publishing and gray publishing?
Postman reference summary
趣谈网络协议
Pytorch 经典卷积神经网络 LeNet
Express ② (routing)
Force deduction brush question 101 Symmetric binary tree
Reading notes: meta matrix factorization for federated rating predictions