当前位置:网站首页>毫米波雷达基础概念学习
毫米波雷达基础概念学习
2022-08-10 05:30:00 【ensdio】
有一说一,我第一次接触到毫米波雷达时候也是很头疼,但是一段时间后,感觉慢慢理解了。
我看的学习视频是
毫米波雷达培训基础教程
下面是我的学习总结:
文中用到的图都来自于TI公司的“毫米波基础知识”PDF.
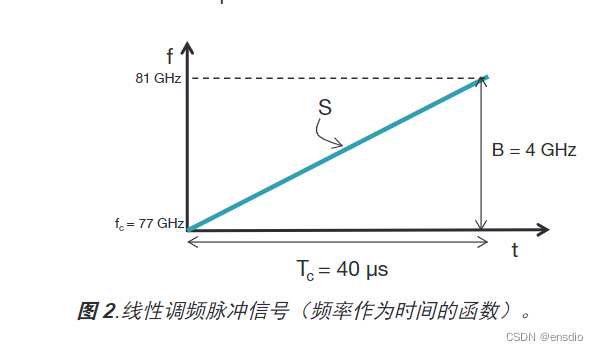
FMCW的介绍
FMCW(调频连续波)是一种特殊的毫米波技术,它的核心是一种称为线性调频连续脉冲的信号。FMCW雷达连续发射调频信号,以测量距离以及角度和速度。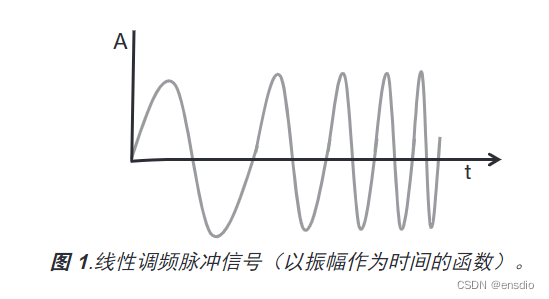
混频
接收信号和发射信号进行混频,𝑥out = sin((𝜔1 - 𝜔2) 𝑡 + (𝛷1 - 𝛷2))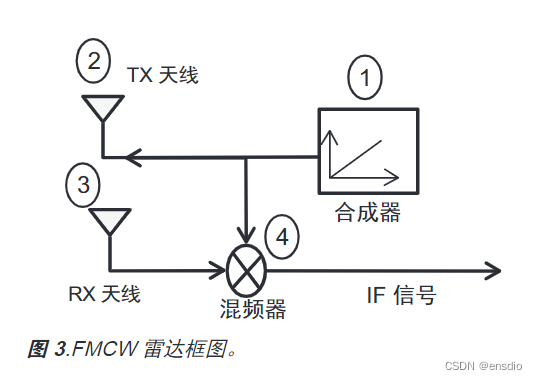
距离的测量
𝜏 = 2𝑑/𝑐
d为距离,𝜏为时延,c为光速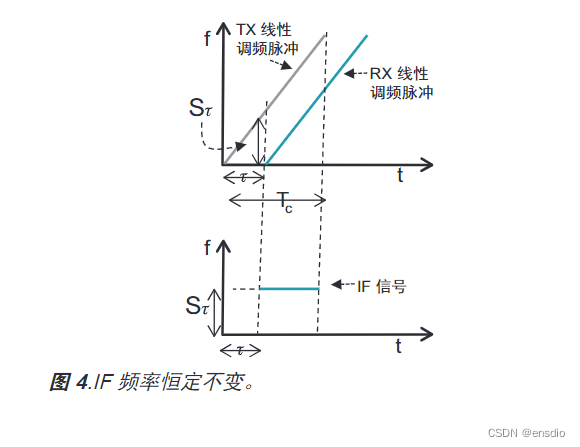
傅里叶变换
分离不同的单音,傅里叶变换处理将会产生一个具有不同的分离峰值的频谱,每个峰值表示在特定距离处存在物体。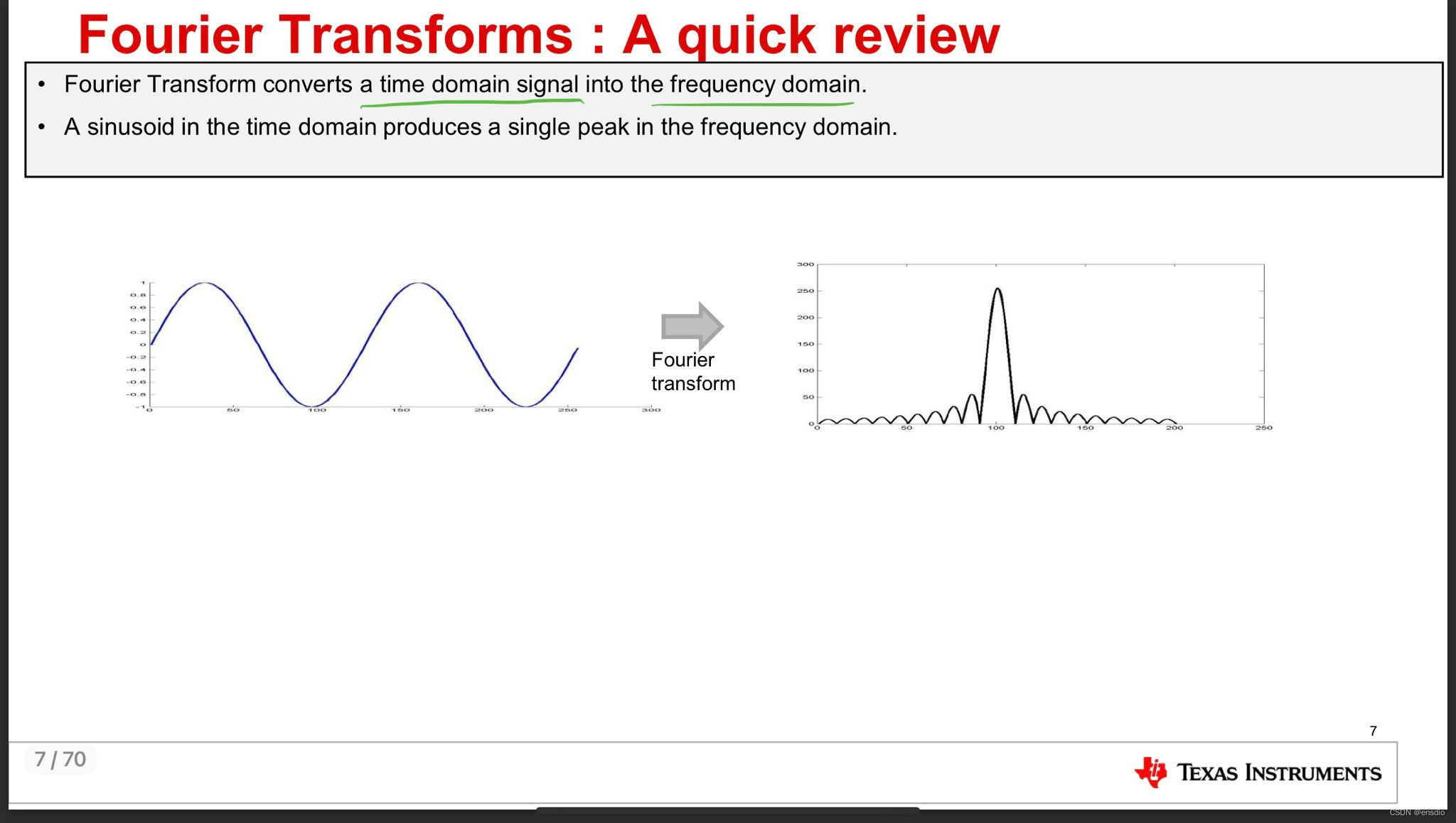
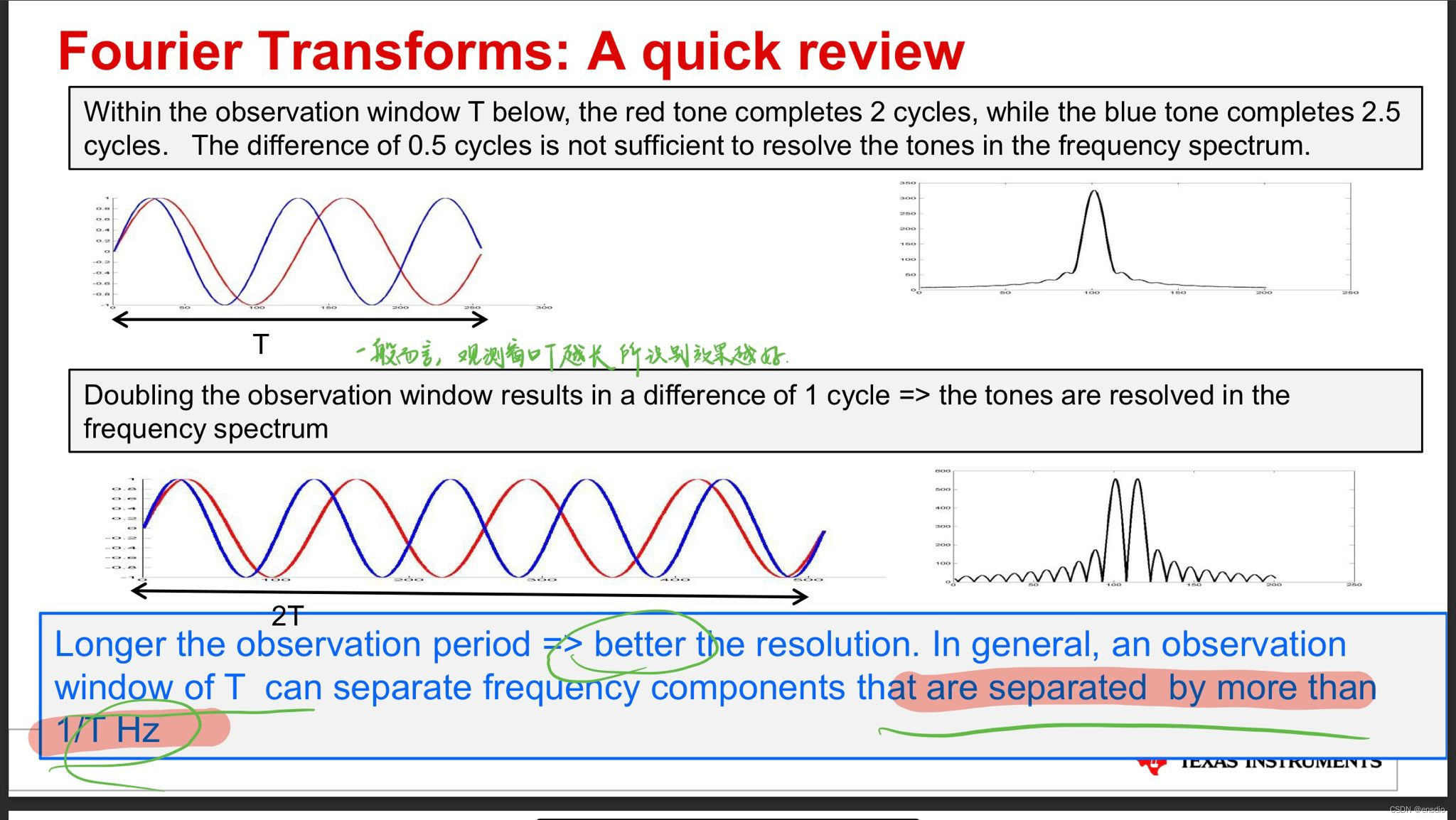
距离分辨率
这是分辨两个及以上物体的能力。距离分辨率是辨别两个或更多物体的能力。当两个物体靠近到某个位置时,雷达系统将不再能够将二者区分开物体。傅里叶变换理论指出,通过延长IF信号,可以提高分辨率。
不同距离下的物体的速度测量
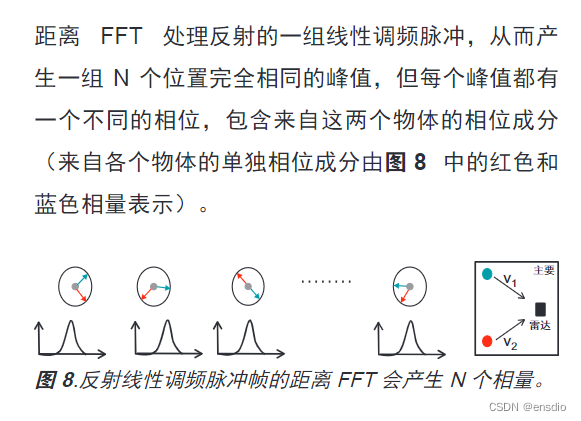
为了测量速度,FMCW雷达会发射两个间隔Tc的线性调频脉冲。每个反射的线性调频脉冲通过FFT加以处理,以便检测物体的距离(距离FFT)。对应于每个线性调频脉冲的距离FFT将在同一位置出现峰值,但相位不同。该测得的相位差对应于速度为vTc的物体的移动。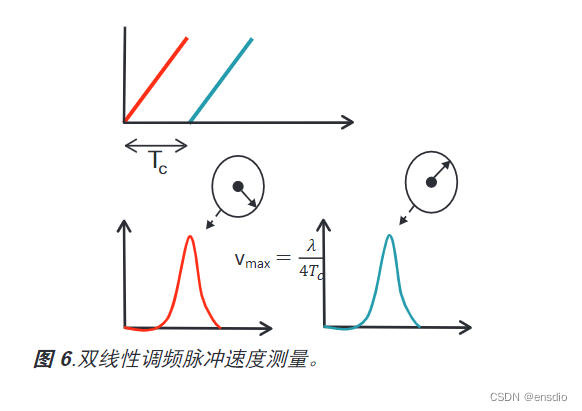
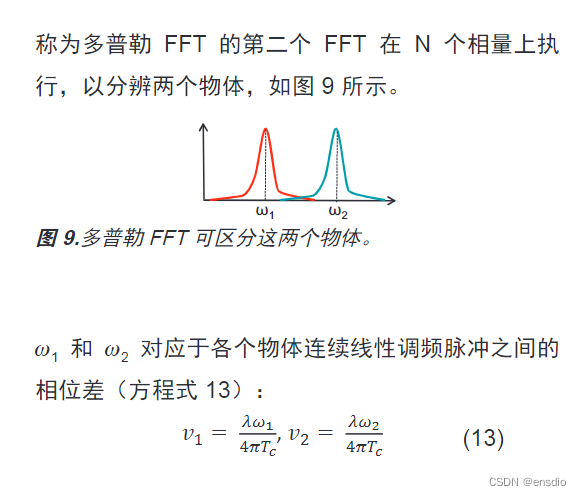
使用位于同一距离处的多个物体进行的速度测量
速度分辨率

角度估计
又称到达角估计,一些基础算法有MUSIC算法和ESPRIT算法。
边栏推荐
- Introduction to curl command
- Concurrency tool class - introduction and use of CountDownLatch, CyclicBarrier, Semaphore, Exchanger
- pytest测试框架
- 深度学习模型训练前的必做工作:总览模型信息
- How does Jenkins play with interface automation testing?
- 树莓派入门(3)树莓派GPIO学习
- Talk about API Management - Open Source Edition to SaaS Edition
- pytorch框架学习(3)torch.nn.functional模块和nn.Module模块
- pytorch框架学习(4)torchvision模块&训练一个简单的自己的CNN (一)
- 接口文档进化图鉴,有些古早接口文档工具,你可能都没用过
猜你喜欢









随机推荐
OSPF实验
SQLSERVER 2008 parses data in Json format
strongest brain (1)
来亲自手搭一个ResNet18网络
速刷正则表达式一周目(上)
第五次实验
论文精度 —— 2016 CVPR 《Context Encoders: Feature Learning by Inpainting》
在yolov5的网络结构中添加注意力机制模块
Module build failed TypeError this.getOptions is not a function报错解决方案
虚拟土地价格暴跌85% 房地产泡沫破裂?依托炒作的暴富游戏需谨慎参与
应用在智能触摸遥控器中的触摸芯片
如何用Apifox 的智能Mock功能?
R中设置图形参数--函数par()详解
kaggle小白必看:小白常见的2个错误解决方案
How does Jenkins play with interface automation testing?
基于Qiskit——《量子计算编程实战》读书笔记(六)
OpenGauss source code, is it maintained with VSCode in the window system?
大咖说·对话生态|当Confluent遇见云:实时流动的数据更有价值
Transforming into a product, is it reliable to take the NPDP test?
接口文档进化图鉴,有些古早接口文档工具,你可能都没用过