当前位置:网站首页>STM32上μC/Shell移植与应用
STM32上μC/Shell移植与应用
2022-04-23 03:56:00 【Chenxr32】
本着“停课不停学”的原则,在家也不能闲着,最近在进一步探索μC/OS时发现了μC/Shell,果断决定尝试一下。
Micrium的产品开源了,GitHub上可以下载代码。https://github.com/weston-embedded
下面先介绍μC/Shell的文件结构,再介绍移植方法和实际应用。
μC/Shell文件结构
\Cfg\Template\shell_cfg.h
μC/Shell的配置文件,设置指令表大小、指令参数格式、最大指令长度等参数。
\Cmd\General\sh_shell.c, sh_shell.h
我没看明白这两个文件是干什么的,移植时也没用上。
\Source\shell.c
μC/Shell的所有函数接口都在这个文件里,包括Shell初始化、添加指令、删除指令、执行指令等函数接口。
\Source\shell.h
μC/Shell的头文件,包括一些函数、函数指针、结构体、变量的声明和宏定义。
\Terminal\ 终端文件夹,提供的接口方便单片机与PC终端交互。
\Terminal\Cfg\Template\terminal_cfg.h
终端的配置文件。
\Terminal\Mode\VT100\terminal_mode.c
包括读写终端指令的函数。
\Terminal\OS\uCOS-III\terminal_os.c
配合uCOS-III使用的文件,创建终端任务。还有一个可以用于uCOS-II的文件。
\Terminal\Serial\Template\terminal_serial.c
输入输出接口文件,移植时需要修改文件里的函数以配合单片机硬件接口。
\Terminal\Source\terminal.c, terminal.h
包括终端初始化、终端任务函数等。
μC/Shell移植
集成开发环境:keil5。单片机:STM32F405,事先已移植好μC/OS-III操作系统。
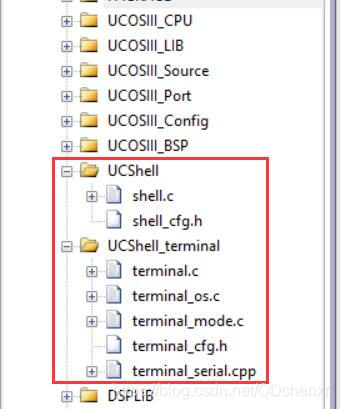
1、在工程目录下创建UCShell文件夹,将μC/Shell的文件复制到UCShell文件夹内,文件结构可以自己调整一下。


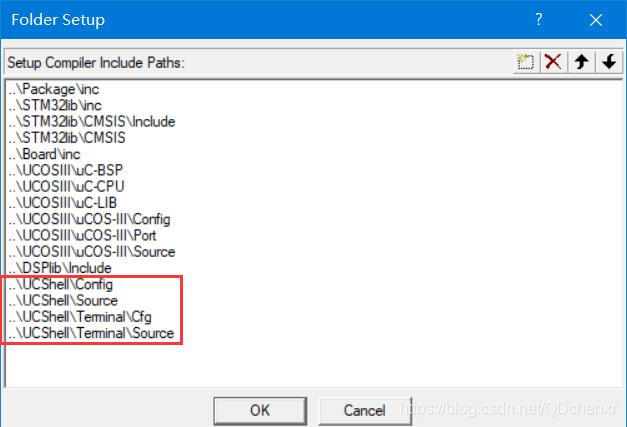
2、在Keil中建立UCShell和UCShell_terminal分组,将相应文件添加入工程,我用的uCOS-III的terminal_os.c文件,没有添加\Cmd\General\下的文件。配置头文件路径。
3、修改terminal_serial.c文件。因为我自己写的外设配置文件是用C++写的,为了方便调用C++函数接口,我将terminal_serial.c改为了terminal_serial.cpp,在terminal.h文件里加extern "C"。
/*
TerminalSerial_Init 函数用于配置单片机串口,我在其他文件里配置了串口。
*/
CPU_BOOLEAN TerminalSerial_Init (void)
{
return (DEF_OK);//原版文件里是DEF_FAIL,一定要改成DEF_OK。
}/*
TerminalSerial_Exit 关闭串口函数,没必要改。
*/
void TerminalSerial_Exit (void)
{
}/*
TerminalSerial_Wr 串口发送字符串,添加串口发送函数。
*/
CPU_INT16S TerminalSerial_Wr (void *pbuf,
CPU_SIZE_T buf_len)
{
board.USART6Send((unsigned char*)pbuf,buf_len);//USART6发送字符串。
return (-1);
}/*
TerminalSerial_RdByte 从串口读取一字节。
我是从缓冲队列中取字节,缓冲队列中的字节是在串口中断时送入。
当缓冲队列空时,返回值一要是0x00。
*/
CPU_INT08U TerminalSerial_RdByte (void)
{
unsigned char byte = 0x00;
if(!shell_rx_queue.EmptyCheck())
{
byte = shell_rx_queue.GetData();
}
return byte;
}/*
TerminalSerial_WrByte 串口发送一字节,添加串口发送函数。
*/
void TerminalSerial_WrByte (CPU_INT08U c)
{
board.USART6Send((unsigned char*)&c,1);
}至此,μC/Shell移植完成,接下来需要用实践检验移植是否成功。
μC/Shell应用
新建myshell.cpp和myshell.h文件,写一个命令行控制LED亮灭的代码验证移植是否成功。
//myshell.c
#include "myshell.h"
#include "shell.h"
#include "terminal.h"
#include "stm32f4xx.h"
//函数原型,函数的参数必须是这种形式,否则不能正常使用。
CPU_INT16S LedCmd(CPU_INT16U argc,
CPU_CHAR *argv[],
SHELL_OUT_FNCT out_fnct,
SHELL_CMD_PARAM *pcmd_param);
//指令表,"LED"是指令,LedCmd是指令回调函数。
static SHELL_CMD ShellCmdTbl[] =
{
{"LED", LedCmd},
{0, 0}
};
//Shell初始化,在μC/OS系统启动任务中调用。
void ShellInit(void)
{
SHELL_ERR err;
Shell_Init(); //初始化Shell
Terminal_Init(); //初始化终端
Shell_CmdTblAdd((CPU_CHAR*)"LED",ShellCmdTbl,&err);//添加一项指令
}
/****************************************************
//LED指令回调函数,参数必须是这种形式。
//argc 记录参数个数,只有指令没有参数时为1;
//argv 字符串指针数组,记录指令及参数,argv[0]是指令LED,argv[1]是参数ON或OFF,如果参数更多,参数会存在argv[2]...
//out_fnct 函数指针,函数响应时指向terminal.c中的Terminal_OutFnct函数;
//pcmd_param 目前还不知道这个参数干什么用的。
*****************************************************/
CPU_INT16S LedCmd(CPU_INT16U argc,
CPU_CHAR *argv[],
SHELL_OUT_FNCT out_fnct,
SHELL_CMD_PARAM *pcmd_param)
{
CPU_INT16S output;
CPU_INT16S ret_val;
if(argc == 2)
{
if(!Str_Cmp(argv[1],"ON"))
{
GPIOB->BSRRL = GPIO_Pin_15;//亮灯
}
else if(!Str_Cmp(argv[1],"OFF"))
{
GPIOB->BSRRH = GPIO_Pin_15;//关灯
}
output = out_fnct((CPU_CHAR*)"OK",(CPU_INT16U)Str_Len("OK"),pcmd_param->pout_opt);
}
else if(argc > 2)
{
output = out_fnct((CPU_CHAR*)"error: too many arguments",(CPU_INT16U)Str_Len("error: too many arguments"),pcmd_param->pout_opt);
}
else
{
output = out_fnct((CPU_CHAR*)"error: missing argument",(CPU_INT16U)Str_Len("error: missing argument"),pcmd_param->pout_opt);
}
ret_val = output;
return ret_val;
}
代码写好后可以试一下,在SecureCRT上输入几条指令看一下现象。(LED亮灭我就不拍照了)

实践证明,移植成功,μC/Shell可以正常使用。
μC/Shell的详细说明请看μC/Shell官方文档 。
μC/Shell模板下载:https://download.csdn.net/download/QDchenxr/12262695
版权声明
本文为[Chenxr32]所创,转载请带上原文链接,感谢
https://blog.csdn.net/QDchenxr/article/details/105025236
边栏推荐
- 【BIM入门实战】Revit建筑墙体:构造、包络、叠层图文详解
- matlab讀取多張fig圖然後合並為一張圖(子圖的形式)
- SQL learning record
- Shopping mall for transportation tools based on PHP
- [AI vision · quick review of robot papers today, issue 30] Thu, 14 APR 2022
- Use the thread factory to set the thread name in the thread pool
- 变量、常量、运算符
- 单极性非归零NRZ码、双极性非归零NRZ码、2ASK、2FSK、2PSK、2DPSK及MATLAB仿真
- Second kill all interval related problems
- MATLAB lit plusieurs diagrammes fig et les combine en un seul diagramme (sous forme de sous - Diagramme)
猜你喜欢

网络原理 | TCP/IP中的连接管理机制 重要协议与核心机制

ROS series (4): ROS communication mechanism series (4): topic communication practice

Detailed explanation on the use of annotation tool via (VGg image annotator) in mask RCNN

What if you encounter symbols you don't know in mathematical formulas

matlab讀取多張fig圖然後合並為一張圖(子圖的形式)

Let matlab2018b support the mex configuration of vs2019

中国移动日赚2.85亿很高?其实是5G难带来更多利润,那么钱去哪里了?

ROS series (IV): ROS communication mechanism series (3): parameter server
Express中间件②(中间件的分类)

Hard core chip removal
随机推荐
標識符、關鍵字、數據類型
Express middleware ② (classification of Middleware)
How to introduce opencv into cmake project
Xiaohongshu was exposed to layoffs of 20% as a whole, and the internal volume among large factories was also very serious
TreeSet课后练习
【NeurIPS 2019】Self-Supervised Deep Learning on Point Clouds by Reconstructing Space
What if you encounter symbols you don't know in mathematical formulas
The difference between lists, tuples, dictionaries and collections
AI CC 2019 installation tutorial under win10 (super detailed - small white version)
Qt程序集成EasyPlayer-RTSP流媒体播放器出现画面闪烁是什么原因?
As a code farmer, what kind of experience is it that a girlfriend can code better than herself?
Shopping mall for transportation tools based on PHP
STM32 advanced timer com event
mui. Plusready does not take effect
[AI vision · quick review of robot papers today, issue 28] wed, 1 Dec 2021
Nel ASA:挪威Herøya设施正式启用
MATLAB lit plusieurs diagrammes fig et les combine en un seul diagramme (sous forme de sous - Diagramme)
ROS series (IV): ROS communication mechanism series (5): Service Communication Practice
Machine translation baseline
[mathematical modeling] my mathematical memory