当前位置:网站首页>PID整定方法
PID整定方法
2022-08-10 03:38:00 【熊孩纸的世界你不懂】
现在一般采用的是临界比例法。利用该方法进行 PID控制器参数的整定步骤如下:
(1)首先预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;
(3)在一定的控制速度下通过公式计算得到PID控制器的参数。
PID调试一般原则:
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分间常数I。
c.在输出不振荡时,增大微分时间常数D。
PID调试一般步骤:
1. 确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令I=0、D=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
2. 确定积分间常数 I
比例增益P确定后,设定一个较大的积分时间常数 I 的初值,然后逐渐减小 I ,直至系统出现振荡,之后在反过来,逐渐加大 I ,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数 I 为当前值的150%~180%。积分时间常数 I 调试完成。
3. 确定微分时间常数D
微分时间常数D一般不用设定,为0即可。若要设定,与确定 P和 I 的方法相同,取不振荡时的30%。
4. 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
边栏推荐
猜你喜欢
动态网页开发基础
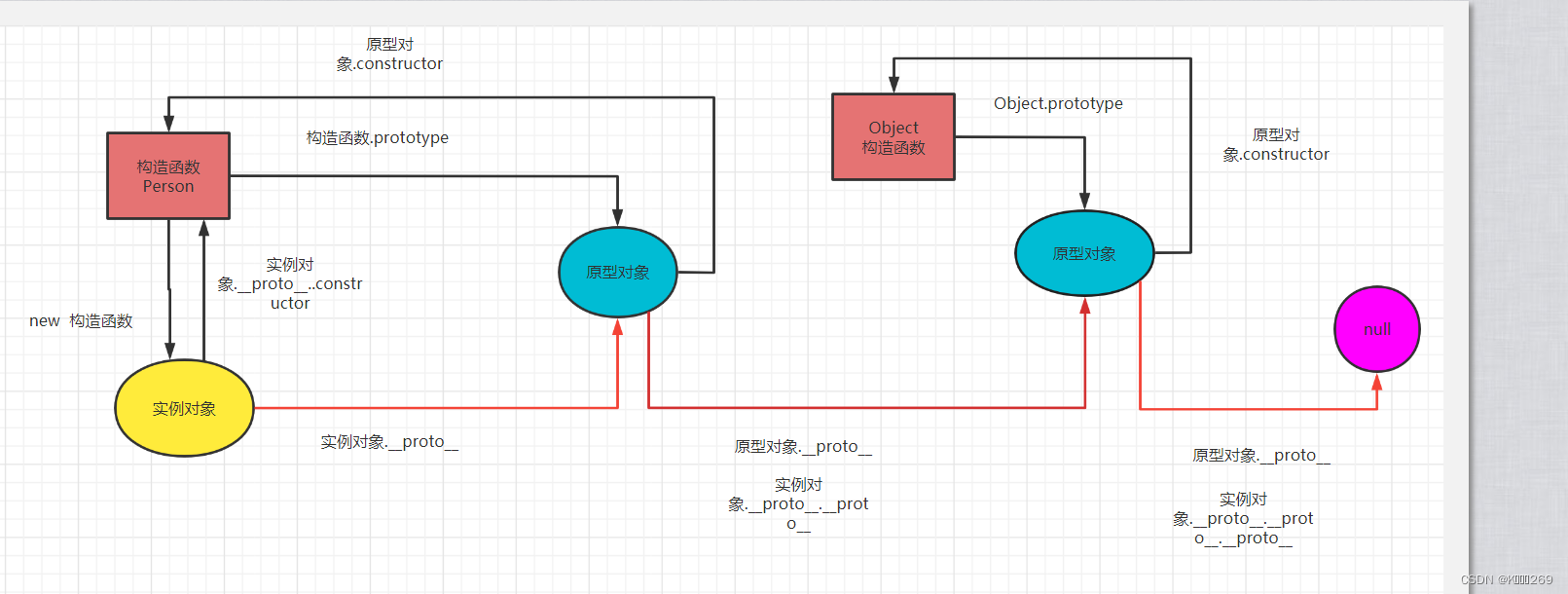
原型和原型链
The so-called software testing ability is actually these 5 points
【MindSpore】在训练过程中的step代表什么?
![[STL]map与set](/img/4a/29ecb90ce7c10adb25fd05b92a5900.png)
[STL]map与set

How to quickly become a software test engineer?What skills do testers need for a monthly salary of 15k?
It's almost 35, still "did a little"?What happened to the test workers who had been in the industry for a few years?

shell文本编辑awk
Did not detect default resource location for test class xxxx
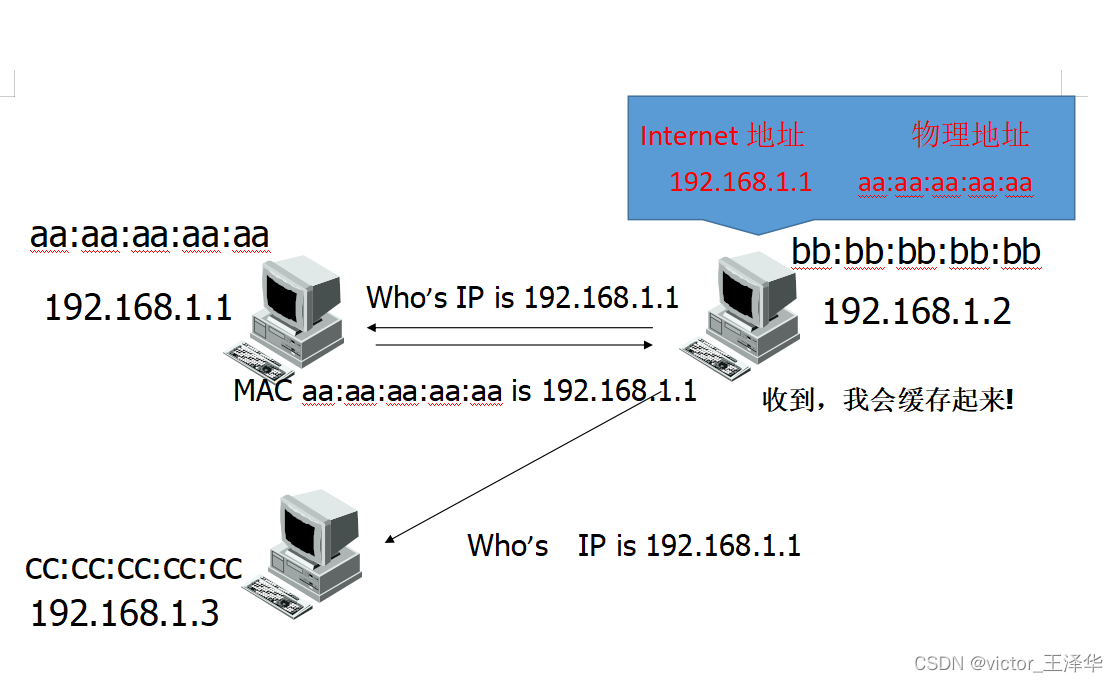
ARP Spoofing - Tutorial Details
随机推荐
Spark面试问题总结
从零开始配置 vim(10)——快捷键配置
c语言:通讯录(动态版本)
Evaluation and Construction of Enterprise Network Security Capability from the Sliding Ruler Model
The so-called software testing ability is actually these 5 points
如何快速成为一名软件测试工程师?测试员月薪15k需要什么技术?
【MindSpore功能】运行SSD-MobileNetV1 FPN样例报错
Embedded Sharing Collection 32
软件的生命周期(软件工程各阶段的工作)
【网络迁移】Pytorch中的F.interpolate对应MindSpore哪个方法
超全面的Android面试题汇总
[STL]map与set
【2022河南萌新联赛第(五)场:信息工程大学】【部分思路题解+代码解析】
进入Mysql数据库操作
day17正则表达式作业
程序国际化
TCP协议之《TSQ限值tcp_limit_output_bytes》
golang go get 时提示 no Go files in xxx
TCP协议之《延迟ACK策略》
同样是初级测试,凭什么他比我薪资高 5000 块?