当前位置:网站首页>姿态解算-陀螺仪+欧拉法
姿态解算-陀螺仪+欧拉法
2022-08-11 05:35:00 【KPer_Yang】
目录
参考博士论文《多旋翼无人机的姿态与导航信息融合算法研究》 张欣
1、基本原理
姿态解算指的是求出导航坐标系(一般选择地理坐标系,用n表示)和载体坐标系(用b表示)在三个轴旋转的角度:俯仰角、横滚角和航向角。分别使用 表示 。姿态解算是欧拉角法和四元数在导航中的应用,而欧拉角法和四元数法可以运用在表示任意坐标系之间的旋转关系,并且四元数法还有其他更广泛的应用。一般使用陀螺仪和加速度计+磁力计两种组合,再使用卡尔曼滤波(或者卡尔曼滤波的改进算法,例如扩展卡尔曼滤波、无迹卡尔曼滤波算法)进行传感器融合得到更高的精度。陀螺仪具有短时精度高的特点。但是受到载体震动、温漂的影响较大,所以长时间会有较大的累积误差。
表示 。姿态解算是欧拉角法和四元数在导航中的应用,而欧拉角法和四元数法可以运用在表示任意坐标系之间的旋转关系,并且四元数法还有其他更广泛的应用。一般使用陀螺仪和加速度计+磁力计两种组合,再使用卡尔曼滤波(或者卡尔曼滤波的改进算法,例如扩展卡尔曼滤波、无迹卡尔曼滤波算法)进行传感器融合得到更高的精度。陀螺仪具有短时精度高的特点。但是受到载体震动、温漂的影响较大,所以长时间会有较大的累积误差。
2、捷联矩阵
捷联矩阵指的是载体坐标系->地理坐标系转换的关系矩阵:旋转轴按照不同顺序进行转动得到不同的捷联矩阵,假设地理坐标系->载体坐标系的顺序按照 的顺序,则得到如下的捷联矩阵。 根据传感器输出和捷联矩阵可以反求姿态角。
的顺序,则得到如下的捷联矩阵。 根据传感器输出和捷联矩阵可以反求姿态角。

3、陀螺仪+欧拉角法姿态解算
假设地理坐标系->载体坐标系的顺序按照 的顺序,则载体坐标系相对于地理坐标系的角速率向量:
的顺序,则载体坐标系相对于地理坐标系的角速率向量:

从而得到微分方程:

使用一阶差分方法进行离散化,解得姿态角。但是当 ,分母=0,这就是欧拉角的奇异点,不能进行全姿态的测量。
,分母=0,这就是欧拉角的奇异点,不能进行全姿态的测量。
边栏推荐
猜你喜欢

随机推荐
window7开启远程桌面功能
arcgis填坑_2
Sturges规则
CLUSTER DAY03( Ceph概述 、 部署Ceph集群 、 Ceph块存储)
WiFi Deauth 攻击演示分析 // mdk4 // aireplay-ng// Kali // wireshark //
照片的35x45,300dpi怎么弄
Map Reduce
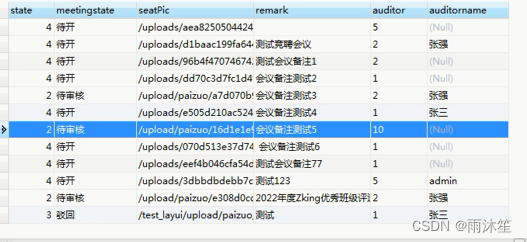
OA项目之我的会议(会议排座&送审)
MoreFileRename批量文件改名工具
HCIP OSPF/MGRE综合实验
ETCD Single-Node Fault Emergency Recovery
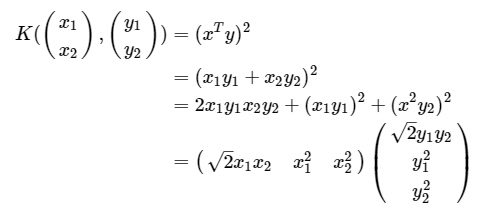
核方法 Kernel method
Numpy_备注
SECURITY DAY04( Prometheus服务器 、 Prometheus被监控端 、 Grafana 、 监控数据库)
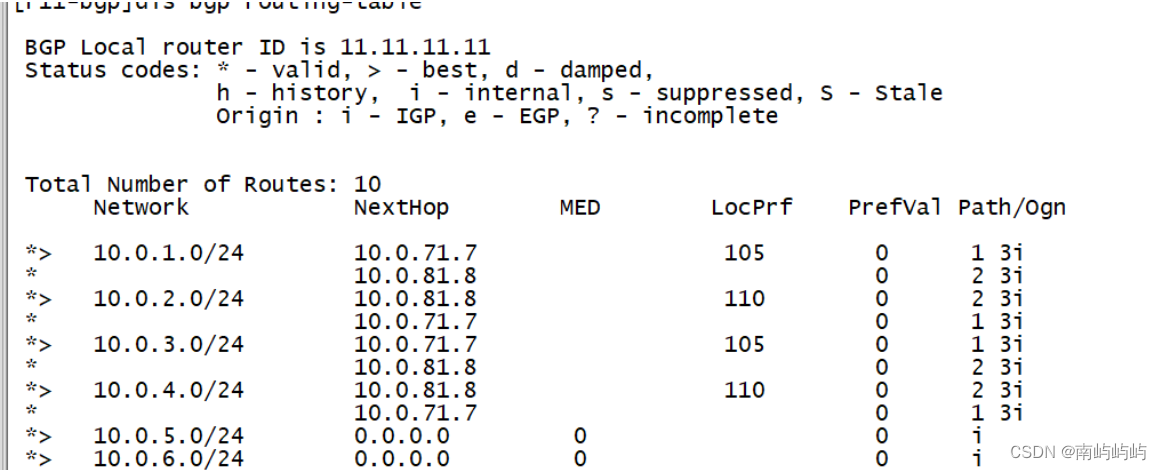
HCIP BGP建邻实验
buildroot setup dhcp
HCIP experiments (pap, chap, HDLC, MGRE, RIP)
SECURITY DAY01(监控概述 、 Zabbix基础 、 Zabbix监控服 )
Top20 bracket matching
阿里巴巴规范之POJO类中布尔类型的变量都不要加is前缀详解