当前位置:网站首页>FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning
FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning
2022-04-23 07:54:00 【Apple Laboratory of Central South University】
author : 19 the lz
The paper :《FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning》
problem :
(a) The existing independent exploration methods lack effective global coverage 、 Conservative exercise plan and low decision-making frequency .
(b) Many existing autonomous exploration methods explore motion in a greedy way , For example, maximize instant messaging gain , Or navigate to the nearest unknown area . Greedy strategy ignores the global optimality , This leads to overall inefficiency .
Besides , Most methods produce fairly conservative movements , To ensure both information gain and security in previously unknown environments . Low exploration speed .
(d) Last but not least , Many methods are computationally expensive , And can't respond to environmental changes quickly and frequently . However , In order to achieve faster exploration , As long as new environmental information is available , A new campaign needs to be planned immediately .
contribution :
- Incrementally updated FIS(frontier information structure), It captures the basic information of the whole exploration space and promotes high-frequency exploration programs .
- A stratification Planning method , It can generate efficient global coverage path , And safe and agile local maneuvers for high-speed exploration .
Research process and results :
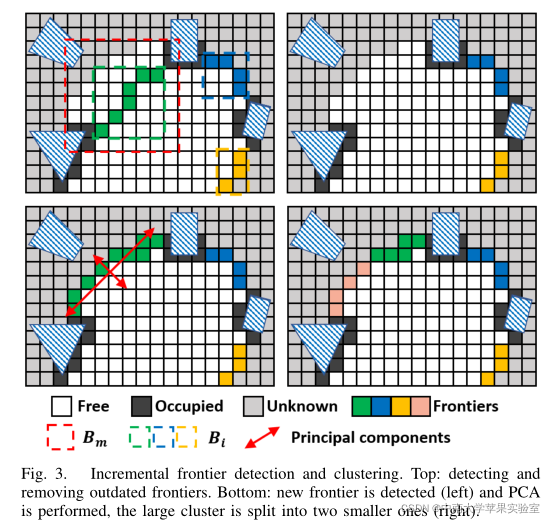
Top : Detect and remove obsolete boundaries .
Bottom : New boundary detected ( Left ) And implement PCA, The large cluster is divided into two smaller clusters ( Right ).

Red Bm Is the of the updated boundary area AABB box (axis-aligned bounding box/ Axis alignment bounding box ).
Every time the map is updated by sensor measurement , Update area Bm Of AABB(axis-aligned bounding box/ Axis alignment bounding box ) It will be recorded , Delete outdated boundary clusters and search for new boundary clusters .
Specific process :
1. Traverse all boundary clusters , return Bi And Bm The point of intersection .
2. Perform an accurate check on the returned cluster , Clusters that contain elements that no longer belong to boundary units will be deleted

After removing , New boundaries are searched by region growth algorithm and clustered into groups .
In these groups , The noise generated by sensor observation is usually ignored (cell Less ).
However , The remaining groups may contain large clusters , It is not conducive to distinguish unique unknown areas and make detailed decisions . therefore , We perform principal component analysis for each cluster (PCA), If the maximum eigenvalue exceeds the threshold , Then it is divided into two unified clusters along the first axis . Splitting is done recursively , In order to divide all large clusters into small clusters .

Generate candidate viewpoints for frontier clusters . In the cylindrical coordinate system centered on the average position of the cluster , Points are evenly sampled . For each sampling point located in free space p, Determine the angle to maximize sensor coverage to the cluster .
tlb(xk1,j1, xk2,j2) Expressed in two viewpoints xk1,j1 and xk2,j2 The lower bound of time when moving between
vmax and ˙ξmax Is the limit of yaw speed and angular rate

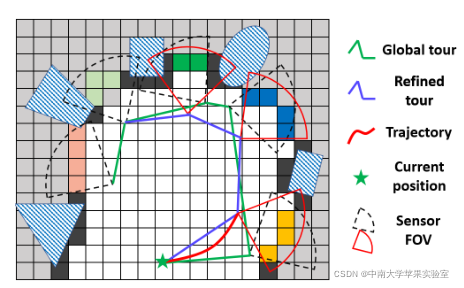
Step generate exploration motion :
(1) Overall planning : Find the shortest path covering the leading-edge cluster in the whole environment ( Travel agent problem ).
( Asymmetric TSP: The optimal open-loop loop loop is obtained by finding the optimal closed-loop loop loop and retrieving its equivalent open-loop loop loop )
(2) Local improvement : Refine the global segment .

The global tourism plan has found a promising sequence of visits to all clusters . For all that , It only involves a single viewpoint of each cluster , This is not necessarily the best combination of all viewpoints .
So the local provides more viewpoints to consider
utilize Dijkstra Algorithms to minimize costs
(3) Minimum time B Spline trajectory : Generate a safe shortest time trajectory to the first viewpoint of the refinement tour .

Further optimization B All parameters of the spline , This minimizes the total trajectory time
Balance smoothness and overall time , And ensure safety and movement
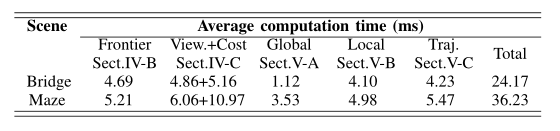
experimental result


The average time of each part of the algorithm
Comparison of different algorithm paths

conclusion
The hierarchical planner plans the exploration movement in three consecutive steps , Find a valid global path , Select a set of local optimal viewpoints , And generate the shortest time local trajectory .
Running results

版权声明
本文为[Apple Laboratory of Central South University]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230626397730.html
边栏推荐
- Plane definition - plane equation
- H5 local storage data sessionstorage, localstorage
- NodeJS(四) 字符读取
- 根据某一指定的表名、列名及列值来向前或向后N条查相关列值的SQL自定义标量值函数
- 将指定路径下的所有SVG文件导出成PNG等格式的图片(缩略图或原图大小)
- 【NLP笔记】CRF原理初探
- Xamarin版的C# SVG路径解析器
- Nodejs (II) read files synchronously and asynchronously
- Unity C# 单例模式 学习复习笔记
- Houdini fluid > > particle fluid export to unity note
猜你喜欢

SAP STO With Billing流程与配置

Houdini>刚体, 刚体破碎RBD

MySQL in window10 version does not work after setting remote access permission

Rethink | open the girl heart mode of station B and explore the design and implementation of APP skin changing mechanism

Custom time format (yyyy-mm-dd HH: mm: SS week x)
Houdini > rigid body, rigid body breaking RBD

SVG中Path Data数据简化及文件夹所有文件批量导出为图片

三分钟教你用Houdini流体>>解算粒子流体水滴

Towords Open World Object Detection

Page dynamic display time (upgraded version)
随机推荐
SQL sorts string numbers
Apache Hudi 如何加速传统的批处理模式?
Custom time format (yyyy-mm-dd HH: mm: SS week x)
Quick sort
Enterprise wechat login free jump self built application
三分钟教你用Houdini流体>>解算粒子流体水滴
Encapsulate the debug function of unity
【NLP笔记】CRF原理初探
Scrapy modifies the time in the statistics at the end of the crawler as the current system time
Solve the problem of deploying mysql8 in docker with correct password but unable to log in to MySQL
Nodejs (VI) sub process operation
Understanding the Role of Individual Units in a Deep Neural Networks(了解各个卷积核在神经网络中的作用)
SAP Query增强开发介绍
解决在docker中部署mysql8, 密码正确但无法登陆MySQL问题
给定区段范围内字符串自生成代码
利用Lambda表达式解决c#文件名排序问题(是100大还是11大的问题)
企业微信免登录跳转自建应用
Houdini>建筑道路可变,学习过程笔记
Houdini > fluid, rigid body export, learning process notes
03Scanner类的使用(控制台输入)