当前位置:网站首页>PIXHAWK飞控使用RTK
PIXHAWK飞控使用RTK
2022-08-11 05:36:00 【Mbot】
前言
固件:PX4
RTK:北力 GRTK
飞控:PIXHAWK4
本文使用的北力RTK是国产板卡,因此需要修改一下GPS驱动才能使用,如果使用的是标准的GPS板卡(如ublox的F9P),可以直接使用即可。
北力 GRTK使用手册
https://wiki.blicube.com/grtk/GRTK%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C/
一、接线
RTK通过串口与飞控通信,可以随便找一个板载的串口都可以,我这里使用的是TELEM2口。将飞控的TX接RTK的RX2,飞控的RX接RTK的TX2,然后共地即可,如下图。
RTK直接用锂电池供电即可,如下图。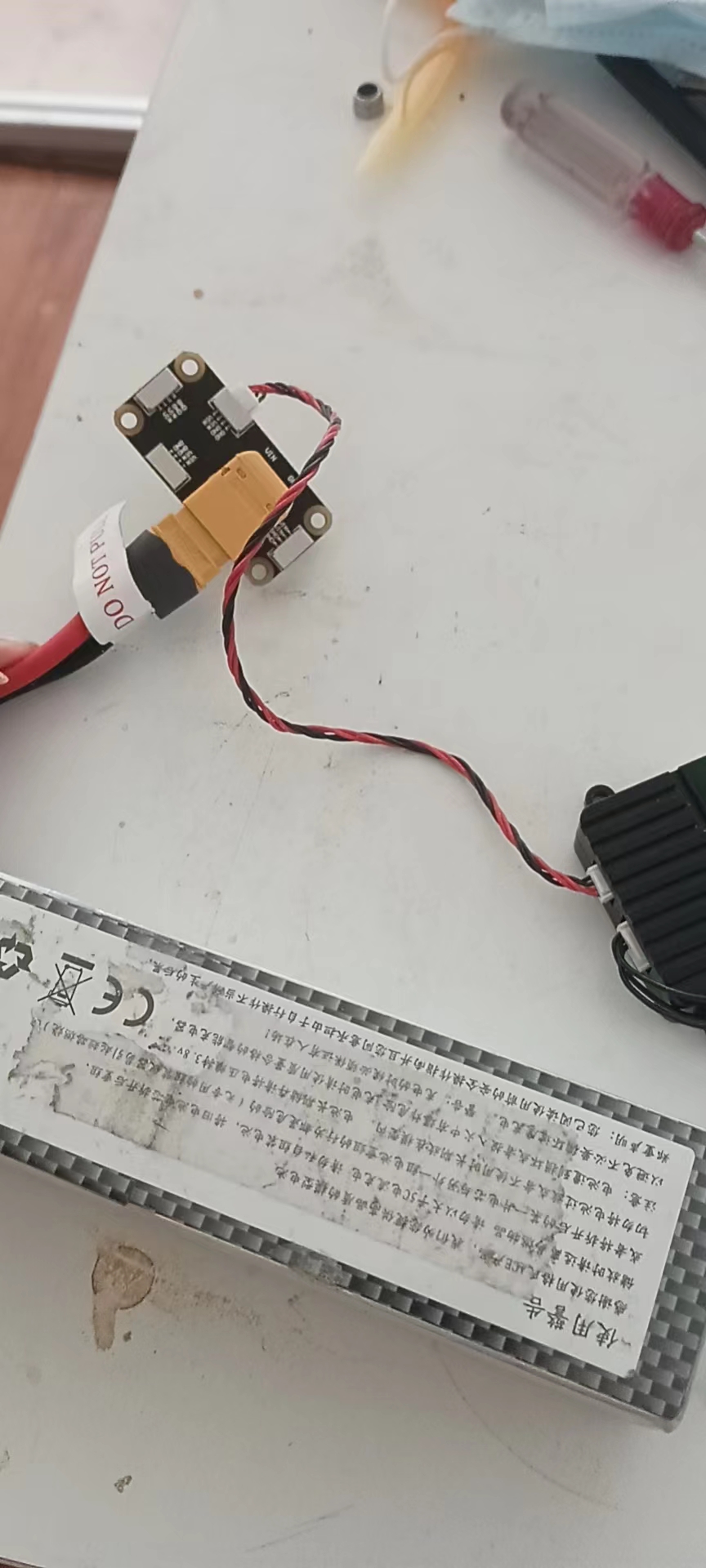
二、飞控设置
我这里设置的是TELEM2
将GPS_1_CONFIG设置为TELEM2,将GPS_1_PROTOCOL设置为Ashtech/Trimble
将SER_TEL2_BAUD设置为RTK的波特率设置(RTK默认是115200)
双天线RTK航向精度较高,可以启动GPS航向,修改EKF2_AID_MASK如下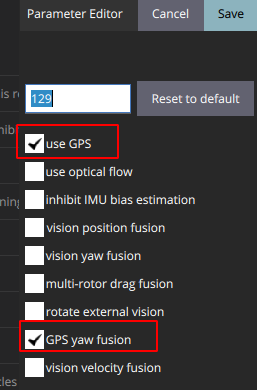
可以采用GPS高度,修改EKF2_HGT_MODE为GPS,如下
RTK的精度较高,将GPS位置和速度的观测噪声改小,使得融合时更依赖RTK,修改EKF2_GPS_P_NOISE和EKF2_GPS_V_NOISE如下:
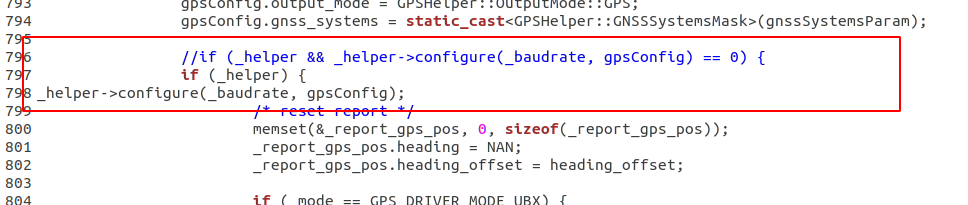
修改下图文件

修改如下
将
if (_helper && _helper->configure(_baudrate, gpsConfig) == 0) {
改成
if (_helper) {
_helper->configure(_baudrate, gpsConfig);
飞控里面的卫星数是从gsv语句中获取的,如果RTK没有输出GSV语句,也可以从GGA语句中获取,在下图位置添加如下:
_gps_position->satellites_used=num_of_sv
v
边栏推荐
- EasyPlayer针对H.265视频不自动播放设置下,loading状态无法消失的解决办法
- 每日sql-求2016年成功的投资总和
- 核方法 Kernel method
- 淘宝API常用接口与获取方式
- 阿里巴巴规范之POJO类中布尔类型的变量都不要加is前缀详解
- Daily sql-employee bonus filtering and answer rate ranking first
- 已解决EROR 1064 (42000): You have an error in. your SOL syntax. check the manual that corresponds to yo
- TOP2两数相加
- 详解BLEU的原理和计算
- iptables 流量统计
猜你喜欢

Attitude solution - gyroscope + Euler method
亚马逊API接口大全
每日sql-员工奖金过滤和回答率排序第一
Daily sql-seek the sum of successful investments in 2016
获取拼多多商品信息操作详情

The ramdisk practice 1: the root file system integrated into the kernel

每日sql -查询至少有5名下属的经理和选举
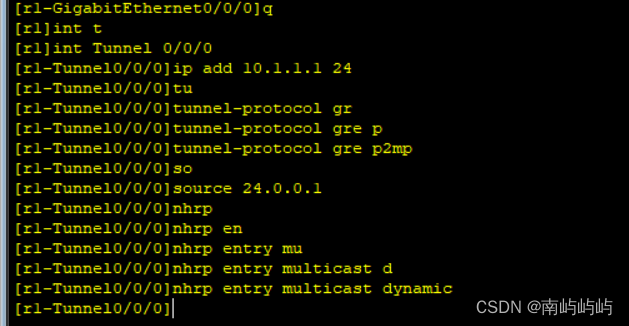
HCIP MGRE\OSPF综合实验

空间金字塔池化 -Spatial Pyramid Pooling(含源码)
HCIP WPN实验
随机推荐
抖音API接口
sql--Users who have purchased more than 3 times (inclusive) within 7 days (including the current day), and the purchase amount in the past 7 days exceeds 1,000
Taobao sku API interface (PHP example)
WiFi Deauth 攻击演示分析 // mdk4 // aireplay-ng// Kali // wireshark //
HCIP实验(pap、chap、HDLC、MGRE、RIP)
拼多多API接口(附上我的可用API)
实现通用的、高性能排序和快排优化
每日sql-员工奖金过滤和回答率排序第一
京东商品详情API调用实例讲解
Coordinate system in navigation and positioning
八股文之redis
Do not add the is prefix to the variables of the boolean type in the POJO class of the Alibaba specification
防火墙-0-管理地址
bash的命令退出状态码
已解决EROR 1064 (42000): You have an error in. your SOL syntax. check the manual that corresponds to yo
HCIP WPN实验
【预约观看】Ambire 智能钱包 AMA 活动第四期即将举行
Daily sql--statistics the total salary of employees in the past three months (excluding the latest month)
kill 命令
sql--7天内(含当天)购买次数超过3次(含),且近7天的购买金额超过1000的用户