当前位置:网站首页>Sharpness difference (SD) calculation method of image reconstruction and generation domain index
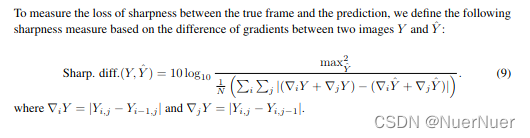
Sharpness difference (SD) calculation method of image reconstruction and generation domain index
2022-04-23 20:48:00 【NuerNuer】
The index is 2016 Year of leCun There is a detailed explanation in an article ,https://arxiv.org/abs/1511.05440
More indicators :https://blog.csdn.net/hacker_long/article/details/104509523
Specific implementation mode :
import numpy as np
import os
import cv2
import tensorflow as tf
from tensorflow.keras import layers
import tensorflow.compat.v1 as tf1
tf1.disable_v2_behavior()
def log10(t):
"""
Calculates the base-10 log of each element in t.
@param t: The tensor from which to calculate the base-10 log.
@return: A tensor with the base-10 log of each element in t.
"""
numerator = tf1.log(t)
denominator = tf1.log(tf.constant(10, dtype=numerator.dtype))
return numerator / denominator
def sharp_diff_error(gen_frames, gt_frames):
"""
Computes the Sharpness Difference error between the generated images and the ground truth
images.
@param gen_frames: A tensor of shape [batch_size, height, width, 3]. The frames generated by the
generator model.
@param gt_frames: A tensor of shape [batch_size, height, width, 3]. The ground-truth frames for
each frame in gen_frames.
@return: A scalar tensor. The Sharpness Difference error over each frame in the batch.
"""
gen_frames = tf1.to_float(gen_frames) / 255
gt_frames = tf1.to_float(gt_frames) / 255
shape = tf.shape(gen_frames)
num_pixels = tf1.to_float(shape[1] * shape[2] * shape[3])
# gradient difference
# create filters [-1, 1] and [[1],[-1]] for diffing to the left and down respectively.
# TODO: Could this be simplified with one filter [[-1, 2], [0, -1]]?
pos = tf.constant(np.identity(3), dtype=tf.float32)
neg = -1 * pos
filter_x = tf.expand_dims(tf.stack([neg, pos]), 0) # #[1, 2, 3, 3]
filter_y = tf.stack([tf.expand_dims(pos, 0), tf.expand_dims(neg, 0)]) # #[2,1,3,3]
strides = [1, 1, 1, 1] # stride of (1, 1)
padding = 'SAME'
gen_dx = tf.abs(tf.nn.conv2d(gen_frames, filter_x, strides, padding=padding))
gen_dy = tf.abs(tf.nn.conv2d(gen_frames, filter_y, strides, padding=padding))
gt_dx = tf.abs(tf.nn.conv2d(gt_frames, filter_x, strides, padding=padding))
gt_dy = tf.abs(tf.nn.conv2d(gt_frames, filter_y, strides, padding=padding))
gen_grad_sum = gen_dx + gen_dy
gt_grad_sum = gt_dx + gt_dy
grad_diff = tf.abs(gt_grad_sum - gen_grad_sum)
batch_errors = 10 * log10(1 / ((1 / num_pixels) * tf.reduce_sum(grad_diff, [1, 2, 3])))
return tf.reduce_mean(batch_errors)
if __name__ == "__main__":
ori_path = 'xxx.jpg'
recon_path = 'xxx.png'
batch_ori_img = []
batch_recon_img = []
ori_img = cv2.resize(cv2.imread(ori_path), (616, 112))
recon_img = cv2.resize(cv2.imread(recon_path), (616, 112))
print(ori_img.shape)
batch_ori_img.append(ori_img)
batch_recon_img.append(recon_img)
batch_ori_img_n = np.array(batch_ori_img)
batch_recon_img_n = np.array(batch_recon_img)
print(batch_recon_img_n.shape)
sd = sharp_diff_error(batch_recon_img_n, batch_ori_img_n)
sess = tf1.Session()
sd_ = sess.run(sd)
print(sd_)
It is worth noting that : Here, we skillfully design the parameters of convolution kernel , The image is listed between columns by using convolution , Difference between lines , among filter_x The size is [1,2,3,3], filter_y The size is [2,1,3,3], They correspond to each other filter Of height,width, in_channel and out_channel. Detailed principle, you can refer to tf.nn.conv2d Usage of .
PS:PSNR and SSIM The calculation of pandas Both provide mature methods that can be called directly
版权声明
本文为[NuerNuer]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204210545522493.html
边栏推荐
- Summary and effect analysis of methods for calculating binocular parallax
- Awk print special characters
- MySQL进阶之数据的增删改查(DML)
- CONDA environment management command
- Syntaxerror: unexpected token r in JSON at position 0
- 危机即机遇,远程办公效率为何会提升?
- Deep analysis of C language pointer (Part I)
- Introduction to intrusion detection data set
- Reentrant function
- 小米手机全球已舍弃“MI”品牌,全面改用“xiaomi”全称品牌
猜你喜欢
3-5 obtaining cookies through XSS and the use of XSS background management system

Commande dos pour la pénétration de l'Intranet
Leetcode 74. Search two-dimensional matrix

Deno 1.13.2 发布
100天拿下11K,转岗测试的超全学习指南
Another data analysis artifact: Polaris is really powerful
41. The first missing positive number

LeetCode 116. Populate the next right node pointer for each node

CUDA, NVIDIA driver, cudnn download address and version correspondence
vulnhub DC:1渗透笔记
随机推荐
The problem of 1 pixel border on the mobile terminal
Learn to C language fourth day
Rust更适合经验较少的程序员?
Zhongchuang storage | how to choose a useful distributed storage cloud disk
Leetcode 542, 01 matrix
LeetCode-279-完全平方数
Introduction to intrusion detection data set
bounding box iou
How many hacking methods do you know?
亚马逊和Epic将入驻,微软应用商城向第三方开放
go array
Explore ASP Net core read request The correct way of body
Realrange, reduce, repeat and einops in einops package layers. Rearrange and reduce in torch. Processing methods of high-dimensional data
软件测试要怎么学?自学还是培训看完这篇文章你就懂了
Chrome 94 引入具有争议的 Idle Detection API,苹果和Mozilla反对
Go limit depth traversal of files in directory
100天拿下11K,转岗测试的超全学习指南
Preliminary understanding of cache elimination algorithm (LRU and LFU)
2021-09-02 unity project uses rider to build hot change project failure record of ilruntime
An error occurs when the addressable assets system project is packaged. Runtimedata is null