当前位置:网站首页>UKFslam
UKFslam
2022-04-23 20:44:00 【xiaoma_ bk】
List of articles
UKF
UKF
- KF Series solution :
Kalman filterNeed a linear modelEKFLinearization by Taylor expansion- A better way to linearize ->
Unscented Transform->UKF- Calculate a set of ( So-called )sigma spot
- From transformation and weighted sigma Point calculation Gauss
Unscented Transform- Calculate a series of Sigma spot
- Every Sigma The point has a weight
- Through nonlinear function transformation Sigma spot
- Weight focus calculation Gauss
Sigma and weight
Sigma spot- choice χ [ i ] {\chi^{[i]}} χ[i], w [ i ] {w^{[i]}} w[i] bring :
- ∑ i w [ i ] = 1 {\sum_i w^{[i]} = 1} ∑iw[i]=1
- μ = ∑ i w [ i ] χ [ i ] { \mu = \sum_i w^{[i]}\chi^{[i]}} μ=∑iw[i]χ[i]
- ∑ = ∑ i w [ i ] ( χ [ i ] − μ ) ( χ [ i ] − μ ) T {\sum = \sum_i w^{[i]}(\chi^{[i]}-\mu)(\chi^{[i]}-\mu)^T} ∑=∑iw[i](χ[i]−μ)(χ[i]−μ)T
- There is no single solution
- How to choose Sigma spot
- first Sigma The point is also the mean χ [ 0 ] = μ {\chi^[0] = \mu} χ[0]=μ
- χ [ i ] = μ + ( ( n + λ ) ∑ ) i {\chi^[i] = \mu + (\sqrt{(n+\lambda)\sum})_i} χ[i]=μ+((n+λ)∑)i for i=1,…,n
- χ [ i ] = μ − ( ( n + λ ) ∑ ) i − n {\chi^[i] = \mu - (\sqrt{(n+\lambda)\sum})_{i-n}} χ[i]=μ−((n+λ)∑)i−n for i=1+n,…,2n
- Square root of matrix
- Definition S S S, ∑ = S S \sum=SS ∑=SS
- By diagonalization :
- ∑ = V D V − 1 = ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) = V ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) ( d 11 ⋯ 0 ⋮ ⋱ ⋮ 0 ⋯ d n n ) V − 1 {\sum=VDV^{-1}= \begin{pmatrix} d_{11} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & d_{nn} \end{pmatrix} = V\begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} \begin{pmatrix} \sqrt{d_{11}} & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & \sqrt{d_{nn}} \end{pmatrix} V^{-1}} ∑=VDV−1=⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞=V⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞⎝⎜⎛d11⋮0⋯⋱⋯0⋮dnn⎠⎟⎞V−1
- Therefore, we can define : S = V D 1 / 2 V − 1 {S=VD^{1/2}V^{-1}} S=VD1/2V−1
Cholesky MatrixSquare root method- Alternative definition of square root of matrix : L , ∑ = L L T {L, \sum=LL^T} L,∑=LLT
- L , ∑ {L,\sum} L,∑ Have the same eigenvector
- Sigma The point can, but does not have to be located in ∑ {\sum} ∑
- How to set the weight
- w m [ 0 ] = λ n + λ {w_m^{[0]}=\frac{\lambda}{n+\lambda}} wm[0]=n+λλ
- w c [ 0 ] = w m [ 0 ] + ( 1 − α 2 + β ) {w_c^{[0]}=w_m^{[0]}+(1-\alpha^2+\beta)} wc[0]=wm[0]+(1−α2+β)
- w c [ i ] = w m [ i ] + 1 2 ( n + λ ) {w_c^{[i]}=w_m^{[i]}+\frac{1}{2(n+\lambda)}} wc[i]=wm[i]+2(n+λ)1 for i=1,…,2n
- choice χ [ i ] {\chi^{[i]}} χ[i], w [ i ] {w^{[i]}} w[i] bring :
UKF Algorithm
-
Prediction
-
χ t − 1 = ( μ t − 1 , μ t − 1 + ( n + λ ) ∑ t − 1 , μ t − 1 − ( n + λ ) ∑ t − 1 ) {\chi_{t-1}=(\mu_{t-1},\ \ \mu_{t-1}+\sqrt{(n+\lambda)\sum_{t-1}},\ \ \mu_{t-1}-\sqrt{(n+\lambda)\sum_{t-1}})} χt−1=(μt−1, μt−1+(n+λ)∑t−1, μt−1−(n+λ)∑t−1)
-
χ ˉ t ∗ = g ( u t , χ t − 1 ) {\bar{\chi}_t^* = g(u_t,\chi_{t-1})} χˉt∗=g(ut,χt−1)
-
μ t ˉ = ∑ i = 0 2 n w m [ i ] χ ˉ t ∗ [ i ] {\bar{\mu_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{\chi}_t^{*[i]}} μtˉ=∑i=02nwm[i]χˉt∗[i]
-
Σ ˉ t = ∑ i = 0 2 n w c [ i ] ( χ ˉ t ∗ [ i ] − μ t ˉ ) ( χ ˉ t ∗ [ i ] − μ t ˉ ) T + R t {\bar{\Sigma}_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{*[i]}-\bar{\mu_t})(\bar{\chi}_t^{*[i]}-\bar{\mu_t})^T+R_t} Σˉt=∑i=02nwc[i](χˉt∗[i]−μtˉ)(χˉt∗[i]−μtˉ)T+Rt
-
-
Correction
- χ t ˉ = ( μ t ˉ , μ t ˉ + ( n + λ ) ∑ t − 1 , μ t ˉ − ( n + λ ) ∑ t − 1 ) {\bar{\chi_{t} }=(\bar{\mu_{t}},\ \ \bar{\mu_{t}}+\sqrt{(n+\lambda)\sum_{t-1}},\ \ \bar{\mu_{t}}-\sqrt{(n+\lambda)\sum_{t-1}})} χtˉ=(μtˉ, μtˉ+(n+λ)∑t−1, μtˉ−(n+λ)∑t−1)
- z t ˉ = h ( χ t ˉ ) {\bar{z_t}=h(\bar{\chi_t})} ztˉ=h(χtˉ)
- z t ^ = ∑ i = 0 2 n w m [ i ] z ˉ t [ i ] {\hat{z_t}=\sum_{i=0}^{2n}w_m^{[i]}\bar{z}_t^{[i]}} zt^=∑i=02nwm[i]zˉt[i]
- S t = ∑ i = 0 2 n w c [ i ] ( χ ˉ t [ i ] − μ ˉ t ) ( χ ˉ t [ i ] − μ ˉ t ) T {S_t=\sum_{i=0}^{2n}w_c^{[i]}(\bar{\chi}_t^{[i]}-\bar{\mu}_t)(\bar{\chi}_t^{[i]}-\bar{\mu}_t)^T} St=∑i=02nwc[i](χˉt[i]−μˉt)(χˉt[i]−μˉt)T
- K t = ∑ ˉ t x , z S t − 1 {K_t = \bar{\sum}_t^{x,z}S_t^{-1}} Kt=∑ˉtx,zSt−1
- ∑ t = ∑ ˉ t − K t S t K t T {\sum_t =\bar{\sum}_t - K_tS_tK_t^T} ∑t=∑ˉt−KtStKtT
UT/UKF/EKF Summary
-
UT/UKF
- Unscented Kalman as an alternative to linearization
- UT Is a better approximation than Taylor's expansion
- UT Use sigma Point propagation
- UT Free parameters in
- UKF Use... In the prediction and correction steps UT
-
UKF VS EKF
- The results of the linear model are consistent with EKF identical
- Nonlinear model ratio EKF A better approximation
- The difference is usually “ It's a little small ”
- UKF You don't need a Jacobian determinant
- The same complexity class
- Than EKF Slightly slower
- Still limited by Gaussian distribution
版权声明
本文为[xiaoma_ bk]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204232041178047.html
边栏推荐
- Parsing methods of JSON data in C - jar and jobobject: error reading jar from jsonreader Current JsonReader item
- 打新债中签以后怎么办,网上开户安全吗
- Install MySQL 5.0 under Linux 64bit 6 - the root password cannot be modified
- Syntaxerror: unexpected token r in JSON at position 0
- Recognition of high-speed road signs by Matlab using alexnet
- The construction and use of Fortress machine and springboard machine jumpserver are detailed in pictures and texts
- Unity ECS dots notes
- On BIM data redundancy theory
- LeetCode 116. Populate the next right node pointer for each node
- How many hacking methods do you know?
猜你喜欢

内网渗透之DOS命令
3-5通过XSS获取cookie以及XSS后台管理系统的使用
![[matlab 2016 use mex command to find editor visual studio 2019]](/img/34/dd883f0ce4358234eb694287228687.png)
[matlab 2016 use mex command to find editor visual studio 2019]
Unity solves Z-fighting
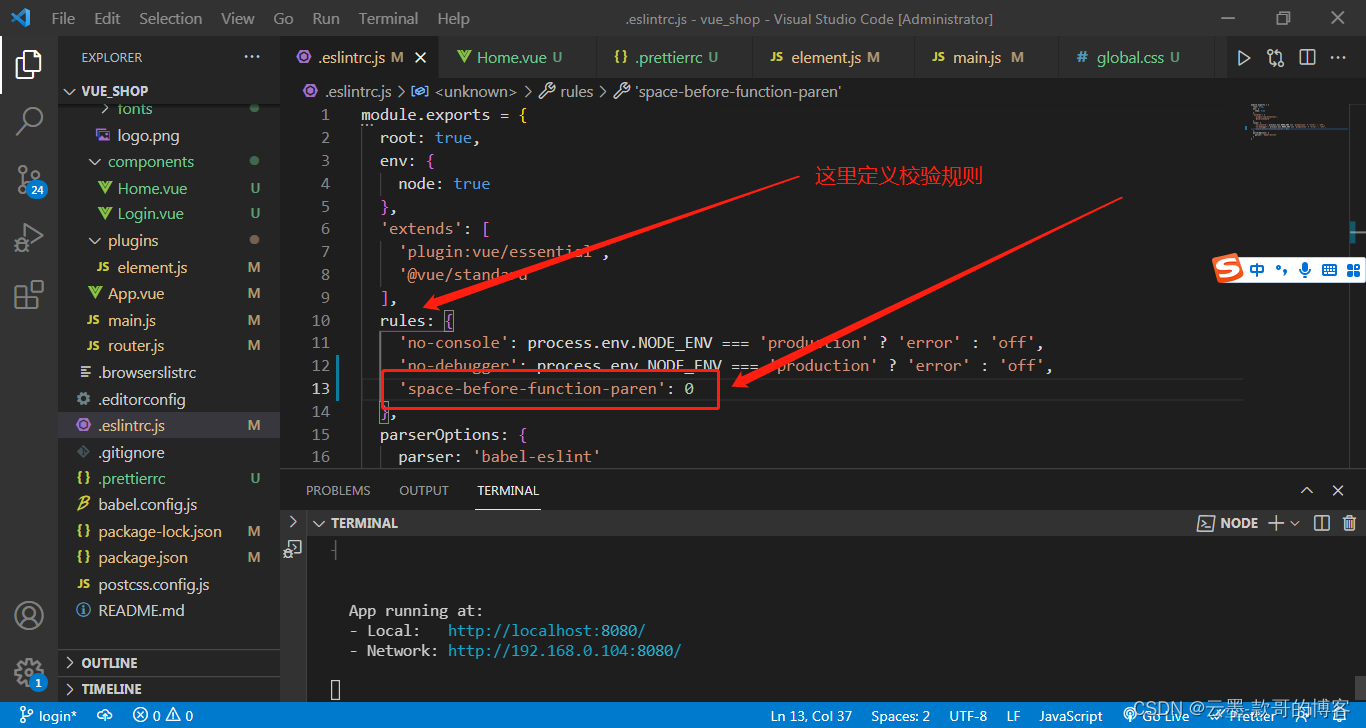
Resolve the eslint warning -- ignore the warning that there is no space between the method name and ()
GO語言開發天天生鮮項目第三天 案例-新聞發布系統二
Unity animation creates sequence frame code and generates animationclip
Shanghai responded that "flour official website is an illegal website": neglect of operation and maintenance has been "hacked", and the police have filed a case
內網滲透之DOS命令
上海回应“面粉官网是非法网站”:疏于运维被“黑”,警方已立案
随机推荐
LeetCode 232、用栈实现队列
XXXI` Prototype ` displays prototype properties and`__ proto__` Implicit prototype properties
LeetCode 116. 填充每个节点的下一个右侧节点指针
go slice
Go zero framework database avoidance Guide
Scripy tutorial - (2) write a simple crawler
Syntax Error: TypeError: this. getOptions is not a function
MySQL基础之写表(创建表)
MySQL stored procedures and functions
2022dasctf APR x fat epidemic prevention challenge crypto easy_ real
Latex formula
Matlab: psychtoolbox installation
Imitation Baidu map realizes the three buttons to switch the map mode by automatically shrinking the bottom
软件测试要怎么学?自学还是培训看完这篇文章你就懂了
Recognition of high-speed road signs by Matlab using alexnet
How to use PM2 management application? Come in and see
Rt-1052 learning notes - GPIO architecture analysis
【SQL】字符串系列2:将一个字符串根据特定字符分拆成多行
Identification of bolt points in aerial photography based on perception
C migration project record: modify namespace and folder name