当前位置:网站首页>数学基础(三)PCA原理与推导
数学基础(三)PCA原理与推导
2022-08-09 02:46:00 【Billie使劲学】
目录
一、PCA数据压缩原理

二、样本点中心化
u向量的方向已经确定,我们将样本点映射到u向量上,显然右图的误差要比左图大许多,因此我们就需要先对样本进行中心化,使之分布于原点O附近。即计算所有样本点的均值(x的均值,y的均值),然后将每个样本点减去这个均值,就得到了中心化之后的样本。

三、计算误差
(注意:以下字母加粗表示向量)如下图所示,u为单位向量,表示映射的主方向,x为样本,pijx为x在u上的投影,我们要计算x投影在u上产生的误差e。
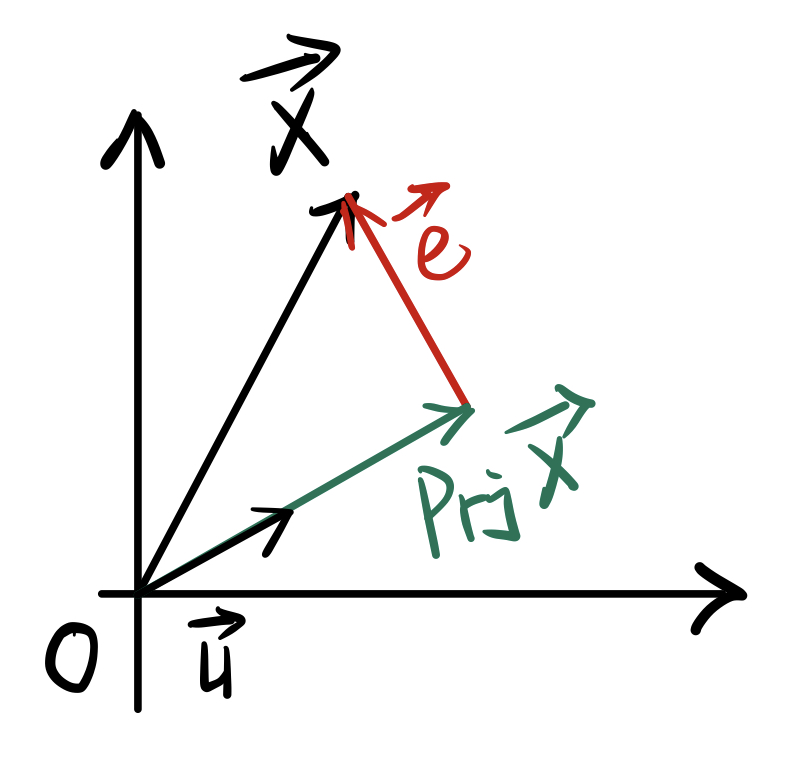
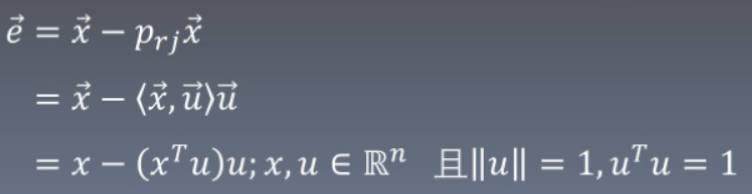
样本x映射到u上产生的误差e为:

这个式子可以从向量角度理解:我们要计算e,根据向量的加法原则(首尾相连),pijx+e=x。
则得到 e=x-pijx。
pijx即为x在u上的映射,我们表示为:
该公式转化成矩阵的形式如下图所示:
e的模长即为损失的大小:
下面的公式推导不难理解
其中x,u为列向量,故 为一个实数,且
为一个实数,且 ,不需要进行转置,且可以交换。
,不需要进行转置,且可以交换。

得到损失为: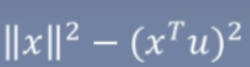
 是固定的,故想要损失降到最低,则需要使
是固定的,故想要损失降到最低,则需要使 最大。
最大。
则如下图所示,其中

如果只有一个样本,则![]() ,直接求最大值。
,直接求最大值。
但此时有N个样本,那要怎么求最大值呢?
将这N样本进行求和:

我们令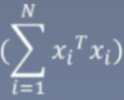 为X。
为X。
这样我们的最大化目标就变为:![]()
我们使用拉格朗日条件极值计算最大值(条件为 ):
):
![]()
对u求导等于0得到:
对λ求导等于0得到:
满足这两个条件![]() ,
,![]() 即可求得最大值,求解n个 λ 和n个u的值,其中λ最大的那个值对应的方向就是最主要的方向,n维降到k维,保留几维就保留几个λ,即λ的个数等于k。
即可求得最大值,求解n个 λ 和n个u的值,其中λ最大的那个值对应的方向就是最主要的方向,n维降到k维,保留几维就保留几个λ,即λ的个数等于k。
注意:矩阵求偏导相关知识请见:
边栏推荐
猜你喜欢









随机推荐
[LeetCode305周赛] 6136. 算术三元组的数目,6139. 受限条件下可到达节点的数目,6137. 检查数组是否存在有效划分,6138. 最长理想子序列
快速乘写法
整数溢出机制 C
多御安全浏览安卓版升级尝鲜,新增下载管理功能
Financial Industry Software Testing Interview Questions (with Answers) | Getting Started Guide
Likou Brush Question Record 1.5-----367. Valid perfect squares
【剑指offer65】不适用加减乘除做加法
Json之JArray的使用方法
Processing Point Clouds
从0开始搭建自动化测试框架之PO分层架构
gpio子系统和pinctrl子系统(中)
YOLOV1详解——Pytorch版
OJ:L2-012 关于堆的判断
JS 实现千分位分隔符
Recently, I have seen a lot of people who want to study by themselves or enroll in classes but don’t know how to choose. I will tell you about it today.
基于JMF视频聊天
Jenkins的环境部署,(打包、发布、部署、自动化测试)
Apache站点下载大文件自动中断或者文件不完整
二分搜索法和二叉搜索树
Appium常用操作及H5页面元素定位