当前位置:网站首页>Chapter 15 HMM模型
Chapter 15 HMM模型
2022-08-09 22:04:00 【桑之未落0208】
1 隐马尔科夫模型
1.1 定义
隐马尔科夫模型:可用于标注问题,在语音识别、NLP、生物信息、模式识别等领域被实践证明是有效的算法。
HMM是关于时序的概率模型,描述由一个隐藏的马尔科夫链生成不可观测的状态随机序列,再由各个状态生成观测随机序列的过程。(生成模型)
隐马尔科夫模型随机生成的状态随机序列,称为状态序列;每个状态生成一个观测,由此产生的观测随机序列,称为观测序列。

 是主题,我们需要通过词来确定的对象。
是主题,我们需要通过词来确定的对象。
 是词,我们所观察的对象。
是词,我们所观察的对象。
在 不可观察的前提下,
不可观察的前提下, 独立。如下图,将右侧部分看作一个整体,作为X’。因此就可以当作贝叶斯网络。当
独立。如下图,将右侧部分看作一个整体,作为X’。因此就可以当作贝叶斯网络。当 不可观察时,
不可观察时, 相互独立。
相互独立。

1.2 HMM模型的确定
HMM由初始概率分布 、状态转移概率分布A以及观测概率分布B确定。
、状态转移概率分布A以及观测概率分布B确定。

Q是所有可能的状态的集合;N是可能的状态数
V是所有可能的观测的集合;M是可能的观测数


参数分析:
- I是长度为T的状态序列,O是对应的观测序列:
 ,
,
- 隐状态:
 ,其中
,其中
 ,其中
,其中
其中 是在时刻t处于状态
是在时刻t处于状态 的条件下时刻t+1转移到状态的概率。
的条件下时刻t+1转移到状态的概率。

ps: 隐状态必须是离散的。

可观测序列,值是连续或者离散的都可以。
n——隐状态的个数 m——可观测的个数
 是在时刻t处于状态的条件下生成观测
是在时刻t处于状态的条件下生成观测 的概率。
的概率。
 是时刻t=1处于状态的概率。
是时刻t=1处于状态的概率。
- 总结:HMM由初始概率分布
 (向量)、状态转移概率分布A(矩阵)以及观测概率分布B(矩阵)确定。和A决定状态序列,B决定观测序列。因此,HMM可以用三元符号表示,称为HMM的三要素:
(向量)、状态转移概率分布A(矩阵)以及观测概率分布B(矩阵)确定。和A决定状态序列,B决定观测序列。因此,HMM可以用三元符号表示,称为HMM的三要素:
1.3 HMM的两个基本性质
(1)齐次假设:
(2)观测独立性假设:
1.4 HMM的实例

问题:求解最终得到{红、白、红}的概率?
设置各个参数如下:
状态集合:Q={盒子1,盒子2,盒子3}
观测集合:V={红,白}
状态序列和观测序列的长度为:T=3+2=5
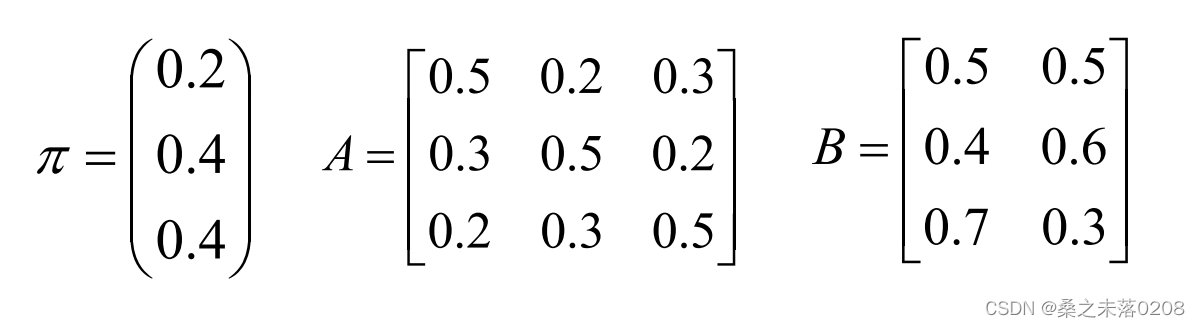
初始概率分布:
状态转移概率分布:
观测概率分布:
求解:见1.6
1.5 HMM的3个基本问题
- 概率计算问题(重点):前向-后向算法——动态规划
给定模型和观测序列,计算模型 下观测序列O出现的概率
下观测序列O出现的概率 。
。
- 学习问题:Baum-Welch算法(状态未知)——EM
已知观测序列,估计模型的参数,使得在该模型下观测序列最大。
- 预测问题:Viterbi算法——动态规划
解码问题:已知模型和观测序列,求给定观测序列条件概率 最大的状态序列
最大的状态序列 。
。
1.6 概率计算问题
- 直接计算(暴力算法)
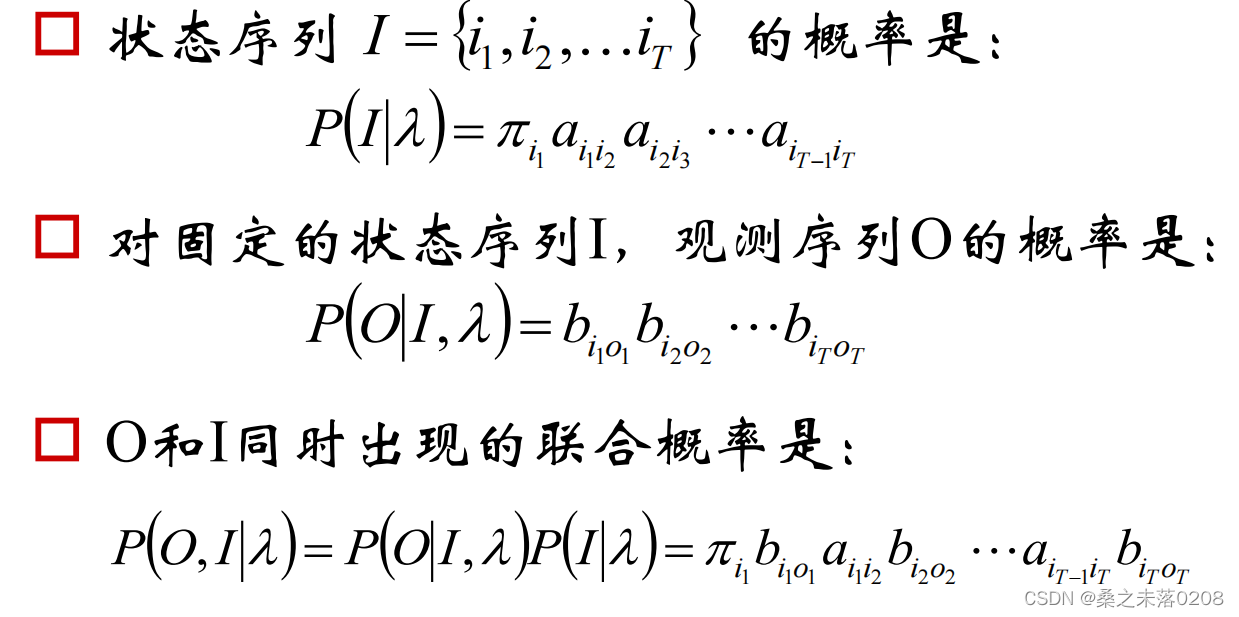
按照概率公式,列举所有可能的长度为T的状态序列 ,\,求各个状态序列I和观测序列
,\,求各个状态序列I和观测序列 的联合概率
的联合概率 ,然后对所有可能的状态序列求和,从而得到。
,然后对所有可能的状态序列求和,从而得到。



- 前向算法
前向算法的定义:给定,定义到时刻t部分观测序列为 ,且状态为的概率称为前向概率,记作:
,且状态为的概率称为前向概率,记作:
计算观测序列概率 :
:
(1)初值:
(2)递推:对于 ,
,
(3)最终:
时间复杂度是
1.4实例可以通过前向算法求解:
(1)计算初值



(2)递推

同理:

(3)最终

- 后向算法
给定,定义到时刻t状态为qi的前提下,从t+1到T的部分观测时序为 的概率为后向概率,记作:
的概率为后向概率,记作:
计算观测序列概率:
(1) 初值
(2)递推,对于t=T-1,T-2,...,1,
(4)最终:
- 前向概率、后向概率的关系

1.7 单个状态的概率
求给定模型和观测 ,在时刻t处于状态qi的概率:
,在时刻t处于状态qi的概率:
记作:

 的意义为:在每个时刻t选择在该时刻最有可能出现的状态
的意义为:在每个时刻t选择在该时刻最有可能出现的状态 ,从而得到一个状态序列
,从而得到一个状态序列
 将它作为预测的结果。
将它作为预测的结果。
例如:对于一句话“今天我吃了一个火龙果”,划分词是可能出现的状态有(begin,mid,end,single)
若这么划分词:今天|我|吃|了|一个|火龙果。
则:
begin:“今”,“一”、“火”
mid:“龙”
end:“天”、“个”
single:“我”、“吃”、“了”
期望:在观测O下状态i出现的期望:
1.8 两个状态的联合概率
求给定模型和观测,在时刻t处于状态qi的概率并且时刻t+1处于状态qi的概率:

其中:
期望:在观测O下状态i转移到状态j的期望:
边栏推荐
猜你喜欢





随机推荐
聊聊SQL语句中 DDL 、DML 、DQL 、DCL 分别是什么
Socket发送缓冲区接收缓冲区快问快答
【技术分享】SLA(服务等级协议)原理与配置
电脑系统重装后怎么用打印机扫描出文件?
leetcode 39. 组合总和(完全背包问题)
Good future, want to be a second new Oriental
第 1 章 一大波数正在靠近——排序
异常处理(try,catch,finally)
深度学习100例 —— 循环神经网络(RNN)实现股票预测
迁移学习 & 凯明初始化
pip 离线到内网安装包
Leetcode.25 K个一组翻转链表(模拟/递归)
你的 Link Button 能让用户选择新页面打开吗?
17-GuliMall 搭建虚拟域名访问环境
量化交易接口系统有哪些稳定性?
R语言ggstatsplot包grouped_ggscatterstats函数可视化分组散点图、并添加假设检验结果(包含样本数、统计量、效应大小及其置信区间、显著性、组间两两比较、贝叶斯假设)
js数组对象去重
three.js镂空圆球拖拽变形js特效
chart.js面积图曲线图统计插件
Linux 配置MySQL