当前位置:网站首页>Random neurons and random depth of dropout Technology
Random neurons and random depth of dropout Technology
2022-04-23 09:32:00 【Tumbling small @ strong】
1. Write it at the front
Learning to reproduce EfficientNet When it comes to the Internet , There's a MBConv The module looks like this :

Of course , The structure itself is not very novel , from resNet Start , Almost a lot of networks behind , such as DenseNet, MobileNet series ,ShuffleNet Series and EfficientNet The series will find such a residual structure . But this exploration found Dropout This point , Previously, when implementing the residual structure , If you come across Dropout, I always thought it was the random inactivation of neurons learned before Dropout, But I didn't find it until I saw the source code here , It's not as simple as I thought !
This residual structure is used in Dropout, It's called random depth Dropout technology . This is 2016 year ECCV An article published in paper, The paper is called 《Deep Network with Stochastic depth》, It's about training , Instead of randomly inactivating neurons in each layer , Instead of randomly removing many layers , This reduces redundancy , It can also speed up training .
out of curiosity , I read this article paper, Also learned a kind of training operation with residual network , therefore , This article wants to unify the two Dropout Put a piece to tidy up .
2. Dropout Random neurons
This technology is common Dropout Technology ,Dropout Random inactivation of neurons , Is that we give a probability , Let the weight of a neuron in the neural network layer be 0( Deactivation )
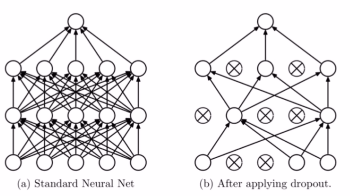
It's every floor , Make some neurons inoperative , This is equivalent to simplifying the network ( The left and right can be compared ), We sometimes appear Over fitting phenomenon , Because our network is too complex , Too many parameters , And our network in the back layer may be too dependent on a neuron in the front layer .
Join in Dropout after , First, the network will become simple , Reduce some parameters , And because we don't know which neurons in the shallow layer will be inactivated , As a result, the back network dare not put too much weight on a neuron in the front layer , This reduces a phenomenon of excessive dependence , Less dependence on features , thus It is beneficial to alleviate over fitting .
Is this similar to our final exam , The teacher always draws a key point for us , But because we don't know which of these key points will really appear on the test paper , So we have to divide our energy evenly , Have to see , It's safer , Can also generalize a little , At least as long as these types of questions can be done . And if we don't divide our energy evenly , Focus only on certain types of questions , Then it must be a wave
So this kind of Dropout Technology can help the network alleviate over fitting . Not too hard to understand , But there are several precautions when using :
-
Data scale changes
We use it Dropout It's used like this when : Only turn it on during training Dropout, When testing, you don't have to Dropout Of , In other words, some neurons will be inactivated randomly during model training , And when we test, we use all the neurons , Then the problem of data scale will arise at this time , So when it comes to testing , The weight of ownership is multiplied by 1-drop_prob, To ensure that the scale changes during training and testing are consistent . How to understand ? Still take the picture above :
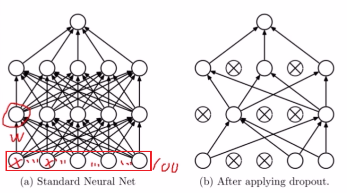
Suppose our input is 100 Features , So the expression of the first neuron in the first layer should be like this , Let's assume that there is no inactivation :
Z 1 1 = ∑ i = 1 100 w i x i Z_{1}^{1}=\sum_{i=1}^{100} w_{i} x_{i} Z11=i=1∑100wixi
Suppose we have w i x i = 1 w_ix_i=1 wixi=1, So the first floor 1 Neurons Z 1 1 = 100 Z_1^1=100 Z11=100, Note that this is a case of non deactivation , So what if inactivation ? Suppose the inactivation rate drop_prob=0.3, That is, our input is about 30% It doesn't work , That is to say, there will be 30 One doesn't work , Of course, this is about ha , Because the inactivation rate %30 It refers to the inactivation rate of each neuron . On the whole, it can almost be understood as 30 One doesn't work , So our Z 1 1 Z_1^1 Z11 amount to
Z 1 1 t r a i n = ∑ i = 1 70 w i x i = 70 {Z_1^1}_{train} = \sum_{i=1}^{70} w_ix_i = 70 Z11train=i=1∑70wixi=70
We found that , If you use Dropout after , our Z 1 1 Z_1^1 Z11 a 70, Less than not inactivating 30, This is a change of scale , So we found that if we use Dropout, One scale of each neuron will be reduced , Like here 70, And when we test, we use all neurons , The scale will become 100, This leads to a numerical difference in the model . therefore , When we were testing , You need all the weights multiplied by 1-drop_prob This one , At this time, when we are testing, it is equivalent to :
Z 1 1 t e s t = ∑ i = 1 100 ( 0.7 × w i ) x i = 0.7 × 100 = 70 {Z_1^1}_{test} = \sum_{i=1}^{100}(0.7\times w_i)x_i = 0.7 \times100 = 70 Z11test=i=1∑100(0.7×wi)xi=0.7×100=70In this way Dropout The training set and do not use Dropout The scale of the test set becomes consistent . Pytorch In the realization of Dropout When , Is the weight times 1 1 − p \frac{1}{1-p} 1−p1 Of , That is to divide by 1-p, So you don't have to multiply the weight by 1-p 了 , Nor does it change the scale of the original data . That is, in the formula above
Z 1 1 t r a i n = ∑ i = 1 70 ( 70 0.7 w i ) x i = 100 Z 1 1 t e s t = ∑ i = 1 100 w i x i = 100 {Z_1^1}_{train} = \sum_{i=1}^{70} (\frac{70}{0.7}w_i)x_i = 100 \\ {Z_1^1}_{test} = \sum_{i=1}^{100} w_ix_i = 100 Z11train=i=1∑70(0.770wi)xi=100Z11test=i=1∑100wixi=100
Pay attention to this detail . -
Dropout Where the layer is placed
such as , Let's write the following codeclass MLP(nn.Module): def __init__(self, neural_num, d_prob=0.5): super(MLP, self).__init__() self.linears = nn.Sequential( nn.Linear(1, neural_num), nn.ReLU(inplace=True), nn.Dropout(d_prob), # Notice that there is Dropout, We see this Dropout It's connected to the second Linear Before ,Dropout Usually in need of Dropout The front layer of the network nn.Linear(neural_num, neural_num), nn.ReLU(inplace=True), nn.Dropout(d_prob), nn.Linear(neural_num, neural_num), nn.ReLU(inplace=True), nn.Dropout(d_prob), # Usually the output layer Dropout No , The data here is too simple to add nn.Linear(neural_num, 1), ) def forward(self, x): return self.linears(x) net_prob_05 = MLP(neural_num=n_hidden, d_prob=0.5) # ============================ step 3/5 Optimizer ============================ optim_reglar = torch.optim.SGD(net_prob_05.parameters(), lr=lr_init, momentum=0.9) # ============================ step 4/5 Loss function ============================ loss_func = torch.nn.MSELoss() # ============================ step 5/5 Iterative training ============================ for epoch in range(max_iter): pred_wdecay = net_prob_05(train_x) loss_wdecay = loss_func(pred_wdecay, train_y) optim_reglar.zero_grad() loss_wdecay.backward() optim_reglar.step() if (epoch+1) % disp_interval == 0: # Pay attention here ,Dropout It's different in training and testing , At this time, you need to set a status for the network net_prob_05.eval() # This .eval() The function indicates that our network is about to use the test state , After setting this test state , To test the network with test data , Otherwise, how does the network know when to test and when to train ? test_pred_prob_05 = net_prob_05(test_x)Pay attention here MLP network Dropout The location of the layers , It is usually placed in need of Dropout In front of the layer . The input layer does not need dropout, The last output layer generally does not need . It is because of Dropout operation , Model training and testing are different , We said that up there , When training, use Dropout And you don't have to Dropout, So when we iterate , You have to tell the network what its current state is , If you want to test , You have to use it first
.eval()The function tells the network all at once , When training, use.train()The function tells the network all at once .
This is what we knew before Dropout Random neuron technology , Before, my learning cognition also stayed here , Until I saw the random depth technology again , So let's focus on how to play this .
3. Dropout Random depth of
The random depth is Dr. Huang Gao in 2016 A technology for network efficient training proposed in , Speaking of Dr. Huang Gao , Maybe you are more familiar with his DenseNet The Internet , This network is later than random depth , But also inspired by random depth .
3.1 background
Deep network now shows a very powerful ability , But there are also many problems . Even on modern computers , The gradient will dissipate 、 The continuous attenuation of information in forward propagation 、 The training time will also be very slow .
ResNet Its powerful performance has been proved in many applications , For all that ,ResNet There is still a defect that can not be ignored —— Deeper networks usually require weeks of training —— therefore , The cost of applying it to practical scenarios is very high . To solve this problem , The authors introduced a “ Counter intuitive ” Methods , That is, we can discard some layers arbitrarily in the training process , And use the complete network in the test process .
stay EfficientNet This phenomenon is also gradually found in , Some previous studies , It mainly focuses on the accuracy of the network and the number of parameters , For example, designing a more complex network structure , deeper , Wider , Higher resolution, etc , To improve the accuracy of the network , But then it gradually turns out , These networks may not be easy to implement in the actual scene . So some follow-up studies , Start to pay attention to the training speed with the network again , Reasoning speed, etc , So some lightweight networks are slowly born . such as MobileNet series ,ShuffleNet Series and EfficientNet series . Of course, it is also possible that the accuracy has slowly reached the bottleneck .
This article paper I also want to improve the training speed or efficiency of the network , So the idea is to propose random depth , Use a shallow depth when training ( Random in resnet On the basis of pass Drop some layers ), Use a deeper depth when testing , Less training time , Improve training performance , Finally, it exceeded... On all four data sets resnet Original performance (cifar-10, cifar-100, SVHN, imageNet). The training process is random dropout Some middle tier method improvements ResNet, Found to significantly improve ResNet Generalization ability .
So how to do it ?
3.2 The basic idea of network
The authors use the residual block as the component of their network , therefore , In training , If a specific residual block is enabled , Then its input will flow through the identity table at the same time shortcut(identity shortcut) And weight layer ; Otherwise, the input will only flow through the identity transformation shortcut.
During the training , Each layer has a “ Survival probability ”, And will be arbitrarily discarded . During the test , be-all block Will remain activated , and block The probability of survival will be adjusted in the training .
hypothesis H l H_l Hl It's No l l l The output result of a residual block , f l f_l fl It's from l l l The main branch output of a residual block . b l b_l bl It's a random variable ( Only 1 perhaps 0, Reflect a block Whether it is activated , Or whether to enable the current main branch ). Then add random depth Dropout The output formula of the residual block is calculated as follows :
H ℓ = ReLU ( b ℓ f ℓ ( H ℓ − 1 ) + id ( H ℓ − 1 ) ) H_{\ell}=\operatorname{ReLU}\left(b_{\ell} f_{\ell}\left(H_{\ell-1}\right)+\operatorname{id}\left(H_{\ell-1}\right)\right) Hℓ=ReLU(bℓfℓ(Hℓ−1)+id(Hℓ−1))
This is actually very easy to understand , The original residual structure , It's the long jump connection + The main branch is then activated nonlinearly , It's just that there's one more b l b_l bl To control whether the main branch is valid . If b l = 0 b_l=0 bl=0, that
H l = ReLU ( i d ( H l − 1 ) ) H_{l}=\operatorname{ReLU}\left(i d\left(H_{l-1}\right)\right) Hl=ReLU(id(Hl−1))
Straight long jump connection , And this is an identity mapping , Equivalent to the current residual block does not work , Otherwise, the current residual block is enabled .
So this b l b_l bl How did you get it ? This is different from ordinary Dropout almost , For each residual block , Both specify a probability that the main branch is activated p p p, That is, each residual block has 1 − p 1-p 1−p The possibility is dropout fall , namely b l = 0 b_l=0 bl=0.
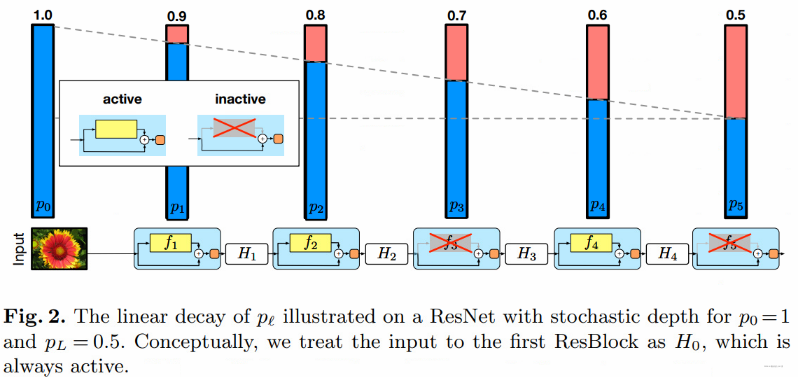
Of course , In practice , The author will “ Linear attenuation law ” Applied to the survival probability of each layer , Because they think earlier layers will extract low-level features , And these basic features are very important to the later layer , Therefore, these layers should not frequently discard the main branch . As the features extracted in the later layer become more and more abstract , Redundancy may be higher , So go to the back , The probability of discarding the main branch increases , The specific calculation formula is as follows :
p ℓ = 1 − ℓ L ( 1 − p L ) p_{\ell}=1-\frac{\ell}{L}\left(1-p_{L}\right) pℓ=1−Lℓ(1−pL)
there p l p_l pl Express l l l Retention probability of main branch in layer training , L L L yes block Total number of blocks , p L p_L pL We gave it dropout_rate. l l l Is said l l l The remnant of the layer .
Experiments show that , It's also training a 110 Layer of ResNet, The performance of training at any depth , Better performance than training at a fixed depth . That means ResNet Some layers in ( route ) May be redundant .
So the advantages of this training method :
- The results solve the time problem of in-depth network training
- Greatly reduce training time , And significantly improve the accuracy of the network
- Can make the network deeper
Of course , The principle here is not very difficult , The following is mainly to see how to implement it from the code level .
Here EfficientNet The code in the network is explained , Others are similar :
# kernel_size, in_channel, out_channel, exp_ratio, strides, use_SE, drop_connect_rate, repeats
default_cnf = [[3, 32, 16, 1, 1, True, drop_connect_rate, 1],
[3, 16, 24, 6, 2, True, drop_connect_rate, 2],
[5, 24, 40, 6, 2, True, drop_connect_rate, 2],
[3, 40, 80, 6, 2, True, drop_connect_rate, 3],
[5, 80, 112, 6, 1, True, drop_connect_rate, 3],
[5, 112, 192, 6, 2, True, drop_connect_rate, 4],
[3, 192, 320, 6, 1, True, drop_connect_rate, 1]]
Here is a list of each stage Configuration of , Don't worry about this , Look at this EfficientNet The network structure of .
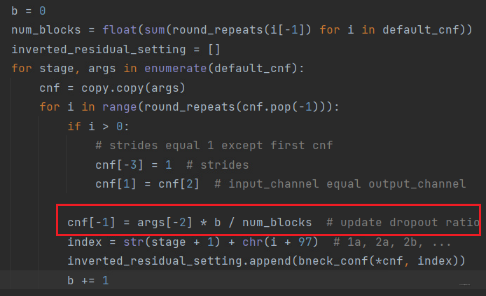
Here is the code to modify the configuration , That is, it will traverse each of the above stage, Then the residual block is established according to the number of repetitions , The residual block here is the inverse residual module , The structure in the figure at the beginning . It's mainly the sentence framed , Namely “ Linear attenuation law ” The formula for , there cnf[-1] Represents the of the current residual block dropout_rate, and args[-2] It's our designated dropout_rate, b b b At present l l l layer , num_blocks That's all blocks Count , It corresponds to the above formula one by one .
We'll find out , When building a network , Each residual block specifies a dropout_rate, So in each residual block , We built dropout The layers are as follows , I'll just take it here EfficientNetV1 Look at , Focus on self.dropout that will do , The above ones are the expansion convolution on the main branch ,dw Convolution and dimensionality reduction convolution , Not the point of this article :
class InvertedResidualEfficientNetV1(nn.Module):
def __init__(self,
cnf: InvertedResidualConfigEfficientNet,
norm_layer: Callable[..., nn.Module]):
super(InvertedResidualEfficientNetV1, self).__init__()
self.use_res_connect = (cnf.stride == 1 and cnf.input_c == cnf.out_c)
layers = OrderedDict()
activation_layer = nn.SiLU # alias Swish
# expand
if cnf.expanded_c != cnf.input_c:
layers.update({
"expand_conv": ConvBNActivation(cnf.input_c,
cnf.expanded_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=activation_layer)})
# depthwise
layers.update({
"dwconv": ConvBNActivation(cnf.expanded_c,
cnf.expanded_c,
kernel_size=cnf.kernel,
stride=cnf.stride,
groups=cnf.expanded_c,
norm_layer=norm_layer,
activation_layer=activation_layer)})
if cnf.use_se:
layers.update({
"se": SqueezeExcitationV2(cnf.input_c,
cnf.expanded_c)})
# project
layers.update({
"project_conv": ConvBNActivation(cnf.expanded_c,
cnf.out_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=nn.Identity)})
self.block = nn.Sequential(layers)
self.out_channels = cnf.out_c
self.is_strided = cnf.stride > 1
# Only in use shortcut Only use when connecting dropout layer
if self.use_res_connect and cnf.drop_rate > 0:
self.dropout = DropPath(cnf.drop_rate)
else:
self.dropout = nn.Identity()
def forward(self, x: Tensor) -> Tensor:
result = self.block(x)
result = self.dropout(result)
if self.use_res_connect:
result += x
The code details here are needless to say , In fact, it is the residual network structure at the beginning , We mainly look at when to use Dropout, Only use the long jump connection , And the current dropout_rate Greater than 0 When , our Dropout The floor will go one DropPath, Otherwise, it is not a residual structure , Or not dropout_rate, Then let's wait and see , therefore DropoutPath For residual structure only .
that DropPath How to achieve it ?
class DropPath(nn.Module):
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
Here is a DropPath layer , The core implementation here is drop_path function , In this , The realization is based on the given dropout_rate Probabilistic random deactivation of the main branch . So let's focus on the implementation logic of this :
def drop_path(x, drop_prob: float = 0, training: bool = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
# ndim Is the number of dimensions x.shape[0] It's the number of samples , shape: (x.shape[0], 1, 1, 1) Dimensions can be used + Splicing
shape = (x.shape[0], ) + (1, ) * (x.ndim - 1)
# Generate a random number for each sample torch.rand[0, 1), keep_prob (0, 1], The sum of the two is [0, 2) The shape is (x.shape[0], 1, 1, 1)
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device) # torch.rand Random number extracted from uniform distribution ([0,1))
# Round down , namely random_tensor Not 0 namely 1 shape (x.shape[0], 1, 1, 1)
random_tensor.floor_() # Round down
# Here, the random deactivation of the main branch , Divide keep_prob To keep the scale of training and testing consistent , Ordinary dropout Ideas
output = x.div(keep_prob) * random_tensor
return output
Here to find out , I annotate every line of code . In fact, the logic is very simple , For one of us batch The sample inside , such as n n n individual , Then input x The shape of ( n , c h a n n e l s i z e , h , w ) (n, channel_{size}, h, w) (n,channelsize,h,w), We'll start with each sample , Will generate a [0,2) Random number between , Then round down , You get non 0 namely 1 Of random_tensor, This is actually our b l b_l bl, Each sample corresponds to one , So when training each sample , Will see if the main branch is activated . Then whether to activate , That's what the last line of code does , Here divided by keep_prob It is to ensure that the scale range of training set and test set is consistent , And ordinary dropout equally .
such , And that's what happened dropout Technology randomly discards some residual layers .
The reason for this is that , I think this technology is very practical in network training , And it's a general technology , Many models with residual networks can be used , such as resnet, densenet, efficientnet wait , It can speed up the training , It can also increase the network accuracy , very powerful Things that are .
Reference resources :
版权声明
本文为[Tumbling small @ strong]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230930283632.html
边栏推荐
- Employee probation application (Luzhou Laojiao)
- ALV树(LL LR RL RR)插入删除
- 小程序报错 :should have url attribute when using navigateTo, redirectTo or switchTab
- Common errors of VMware building es8
- Flink 流批一体在小米的实践
- [geek challenge 2019] havefun1
- DVWA range practice record
- Summary of wrong questions 1
- Using sqlmap injection to obtain the account and password of the website administrator
- JS scope, scope chain, global variables and local variables
猜你喜欢

Go language learning notes - structure | go language from scratch

【SQL server速成之路】数据库的视图和游标

《數字電子技術基礎》3.1 門電路概述、3.2 半導體二極管門電路

DVWA range practice
![Buuctf [actf2020 freshman competition] include1](/img/47/b8f46037f7e9476b8e01e8d6a7857a.png)
Buuctf [actf2020 freshman competition] include1

Kernel PWN learning (3) -- ret2user & kernel ROP & qwb2018 core

653. Sum of two IV - input BST

Secrets in buffctf file 1

Unfortunately, I broke the leader's confidential documents and spit blood to share the code skills of backup files

Pre parsing of JS
随机推荐
Leetcode question bank 78 Subset (recursive C implementation)
kettle实验
Number of islands
【SQL server速成之路】数据库的视图和游标
《数字电子技术基础》3.1 门电路概述、3.2 半导体二极管门电路
ALV tree (ll LR RL RR) insert delete
108. Convert an ordered array into a binary search tree
npm ERR! network
#yyds干货盘点#ubuntu18.0.4安装mysql并解决ERROR 1698: Access denied for user ''root''@''localhost''
ASUS laptop can't read USB and surf the Internet after reinstalling the system
Leetcode-199 - right view of binary tree
SQL used query statements
Get trustedinstaller permission
112. Path sum
Data visualization: use Excel to make radar chart
npm报错 :operation not permitted, mkdir ‘C: \Program Files \node js \node_ cache _ cacache’
Personal homepage software fenrus
[Luke V0] verification environment 2 - Verification Environment components
考研线性代数常见概念、问题总结
Go language learning notes - array | go language from scratch