当前位置:网站首页>ROS learning notes - tutorial on the use of ROS
ROS learning notes - tutorial on the use of ROS
2022-04-23 20:59:00 【YOULANSHENGMENG】
One , What is knot ROS System
ROS(Robot Operating System) Robot operating system actually provides multi node cooperation mechanism , Use the topic 、 service 、 Parameter server 、action And so on , meanwhile ROS It also provides Gazebo、rviz、rqt、rosbag Tools such as , The essence of these tools is also the sending and receiving of communication messages .
ROS Itself provides a point-to-point network , Working together on data , Its basic concepts include nodes 、 Master node 、 Parameter server 、 news 、 service 、 topic of conversation 、 Bags, etc .
1.1、ROS The main characteristics of
(1) Distributed architecture ( Each work process is regarded as a node , Use the node manager to manage ),
(2) Multilingual support ( Such as C++、Python etc. ),
(3) Good scalability ( You can write a node , It can also be done through roslaunch Organize many nodes into a larger project ),
(4) Open source code (ROS follow BSD agreement , Free of charge for individual and commercial applications and modifications ).
1.2 ROS Common commands
rospack- Get information about the package : View package dependencies ,
roscd- Switch to package directory
rosls- View the files contained in the package
rosnode- see ros Node related information : View the list of nodes , View node message properties
rosrun- The software package runs - Function of a node :rqt-graph
rostopic- Get information about the topic
rosservice- Get service related information
rosparam- Get parameter related information
roslaunch- start-up launch file
rosmsg- View information about the message
have access to Tab The completion code
Two 、ROS Calculation diagram level in
Figure conceptual description
· Nodes: node , A node is an executable file , It can go through ROS Communicate with other nodes .
· Messages: news , News is a kind of ROS data type , Used to subscribe to or publish to a topic .
· Topics: topic of conversation , Nodes can publish messages to topics , You can also subscribe to topics to receive messages .
· Master: Node manager ,ROS The name of the service ( For example, help nodes find each other ).
· rosout: ROS Equivalent to stdout/stderr.
· roscore: host + rosout + Parameter server ( The parameter server will be introduced later )
2.1 node
Node is the main computing execution process .ROS It is composed of many nodes . A node is just ROS An executable file in the package .ROS Nodes can use ROS The customer library communicates with other nodes . Nodes can publish or receive a topic . Nodes can also provide or use certain services .
( Node is ros A very important concept in , To help beginners understand this concept , Here is a popular example :
for example , We have a robot , And a remote control , So when the robot and the remote control start working , Just two nodes . The remote control plays the role of giving directions The role of orders ; The robot is responsible for monitoring the instructions given by the remote control , Complete the action . From here we can see that , A node is a task that can perform a specific job Work unit of business , And can communicate with each other , So as to realize the overall function of a robot system . Here, we simply define the remote controller and robot as two nodes , In fact, in the robot, according to the controller 、 sensor 、 Actuator and other different modules , It can also be further subdivided into more nodes , This is defined according to the program written by the user .)
The method of starting a node , Take the tortoise tutorial as an example :
roscore
rosrun turtlesim turtlesim_node
// If you want to view the graph of nodes , Execute the following command
rqt_graphROS Command line tools rosnode:
| rosnode command | effect |
|---|---|
| rosnode list | Query all currently running nodes |
| rosnode info node_name | Display the details of this node |
| rosnode kill node_name | End a node |
| rosnode ping | Test whether the node survives |
| rosnode machine | Lists the nodes running on a particular machine or list of machines |
| rosnode cleanup | Clear the registration information of non runnable nodes |
When developing and debugging, you often need to check the current node as well as node Information , So remember these common commands . If I can't remember , It can also be done through rosnode help Check it out. rosnode command reference .
2.2. news
Nodes pass through news Realize each other's Logical connection and data exchange .
ROS Command line tools rosmsg:
| rosmsg command | effect |
|---|---|
| rosmsg show | Display a message field |
| rosmsg list | List all messages |
| rosmsg package | List all Feature Pack messages |
| rosmsg packages | List all feature packs with this message |
| rosmsg md5 | Display a message MD5 Test value |
2.3 topic of conversation
Topic is a kind of message transmission ( Release / subscribe ) The way . Every message should be posted on the corresponding topic , Every topic is strongly typed .
ROS Topic messages can use TCP/IP or UDP transmission ,ROS The default transmission mode is TCP/IP. be based on TCP Transmission becomes TCPROS, It's a long connection ; be based on UDP Transmission becomes UDPROS, It's a low latency 、 Efficient transmission mode , But it's easy to lose data , Suitable for remote operation .
| rostopic command | effect |
|---|---|
| rostopic bw /topic | Displays the bandwidth used by the topic |
| rostopic echo /topic | Output the message corresponding to the topic to the screen |
| rostopic find message_type | Find topics by type |
| rostopic hz /topic | Displays how often the topic is published |
| rostopic info /topic | Output information about the topic |
| rostopic list | Output a list of active topics |
| rostopic pub /topic type args | Publish data to topics |
| rostopic type /topic | Output topic type |
2.4 service
The service is used for the request response model , It must also have a unique name . When a node provides a service , All nodes can be accessed by using ROS The code written by the client communicates with it .
| rosservice command | effect |
|---|---|
| rosservice args /service | Display service parameters |
| rosservice call /service | Request the service with the input parameters |
| rosservice find /service | Find topics by type |
| rosservice info /service | Displays information about the specified service |
| rosservice list | Display active service information |
| rosservice uri /service | Show ROSRPC URI service |
| rosservice type /service | Displays the service type |
2.5 Message logging package
Message recording package is a kind of package for saving and playback ROS File format of message data , Save in .bag In file . Is an important mechanism for storing data .
| rosbag command | effect |
|---|---|
| check | Determine whether a package can be carried out in the current system , Or whether it can be migrated . |
| decompress | Compress one or more package files . |
| filter | Decompress one or more package files . |
| fix | Fix the message in the package file , In order to play in the current system . |
| help | Get relevant command guidance and help information . |
| info | Summarize the contents of one or more packages . |
| play | Replay the contents of one or more package files in a time synchronized manner . |
| record | Record a package file with the content of the specified topic . |
| reindex | Re index one or more package files . |
2.6 Parameter server
The parameter server is a shared multivariable dictionary accessible through the network , Stored on the node manager by keyword .
ROS Command line tools rosparam:
| rosparam command | effect |
|---|---|
| rosparam delete parameter | Delete parameters |
| rosparam dump file | Write the parameters in the parameter server to the file |
| rosparam get parameter | Get the parameter value |
| rosparam list | List the parameters in the parameter server |
| rosparam load file | Load parameters from file to parameter server |
| rosparam set parameter value | Set parameters |
2.7 Node manager (Master)
The node manager is used for topics 、 Registration and search of service name . Throughout ROS If there is no node manager in the system , There will be no communication between nodes .
3, Create a virtual machine based on ros Project files for
3.1 Project file structure
ROS File structure , Not every folder is required , Design according to business requirements .

After turning on the virtual machine , Sometimes it indicates that the network activation fails , Refer to the following link for repair methods :
3.2、 working space
A workspace is managing and organizing ROS Place of project documents , The intuitive description is a warehouse , It's loaded with ROS Various project works , It is convenient for system organization and management to call . In the visual graphical interface is a folder . We wrote it ourselves ROS The code is usually placed in the workspace . There are four primary directories under it :
- src: Source space ;ROS Of catkin software package ( Source code package )
- build: Compilation space ;catkin(CMake) Cache information and intermediate files
- devel: Development space ; Generated target file ( Including header files , Dynamic link library , Static link library , Executable documents, etc )、 environment variable
- install: Installation space
The top workspace ( Can be named as you like ) and src ( It has to be for src) Folders need to be created by yourself ;
- build and devel Folder by catkin_make Command automatic creation ;
- install Folder by catkin_make install Command automatic creation , Hardly used , Generally do not create .
Be careful : Use catkin_make Be sure to return to the top workspace before compiling . Under the same workspace , A feature pack with the same name is not allowed ; In different workspaces , Feature packs with the same name are allowed .
mkdir -p ~/catkin_ws/src # establish
cd catkin_ws/ # Enter the workspace
catkin_make # compile
source devel/setup.bash # Update workspace environment 3.3、package Function pack
package It is a specific combination of file structure and folder . Usually, the program code that implements the same specific function is put into one package in . Only CMakeLists.txt and package.xml yes 【 must 】 Of , The rest of the path depends on whether the software package needs to be .
Create Feature Pack
cd ~/catkin_ws/src
catkin_create_pkg my_pkg rospy rosmsg roscpp

【rospy】、【rosmsg】、【roscpp】 It's a dependency Library , Can be added according to business requirements , You can also add other , When you add it when you create it, you don't need to configure , Forget to add. You need to configure it yourself .
File structure :
|-- CMakeLists.txt # ( must ) At present package The Compilation Rules of . It usually needs to be c++ Add compile time dependencies to the code , To perform, etc .
|—— package.xml # ( must )package Description information of . Usually add some ros Library support .
|—— include Folder # Deposit c++ Of the header file
|—— config Folder # Store parameter configuration files
|—— launch Folder # Deposit launch file (.launch or .xml)
|—— meshes Folder # Storage of robots or simulation scenes 3D Model (.sda, .stl, .dae etc. ) ;
|—— urdf Folder # Model description of storage robot (.urdf or .xacro) ;
|—— rviz Folder # rviz file
|—— src Folder # c++ Source code
|—— scripts Folder # Executable script ; for example shell Script (.sh)、Python Script (.py) ;
|—— srv Folder # Customize service
|—— msg Folder # Customize topic
|—— action Folder # Customize action
3.4、CMakeLists.txt Introduce
CMakeLists.txt It was Cmake Compile the rules file of the system , and Catkin The compiling system basically follows CMake Compilation style , Just for ROS The project has added some macro definitions . So in terms of writing ,catkin Of CMakeLists.txt And CMake Basically the same .
This document directly stipulates this package What to rely on package, Which targets to compile , How to compile and so on . therefore CMakeLists.txt It's very important , It specifies the rules from the source code to the target file ,catkin When the compiling system works, it will first find each package Under the CMakeLists.txt, Then compile and build according to the rules .
CMakeLists.txt The basic grammar of is still in accordance with CMake, and Catkin Add a few macros to it , The overall structure is as follows :
cmake_minimum_required() # what is needed CMake edition
project() # Package name
find_package() # Find other... Needed for compilation CMake/Catkin package
catkin_python_setup() # Enable Python Module support
add_message_files() # message generator
add_service_files() # service generator
add_action_files() # action generator
generate_message() # Generate different language versions of msg/srv/action Interface
catkin_package() # Generate current package Of cmake To configure , For other software packages that depend on this package
add_library() # Used to specify the library generated by compilation . default catkin Compile to generate shared library .
add_executable() # Generate executable binaries
add_dependencies() # The definition target file depends on other target files , Ensure that other goals have been built
target_link_libraries() # Specifies the library to which the executable is linked . This should be used in add_executable() Back .
catkin_add_gtest() # Test build
install() # Install to this machine After following the above steps , Generated CMakeLists.txt The contents of the file are :
cmake_minimum_required(VERSION 3.0.2)
project(my_pkg)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_pkg
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/my_pkg.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/my_pkg_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_my_pkg.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
Important syntax instructions :
1)catkin_package()
catkin_package() It's a catkin Provided CMake macro . This is specified for the build system catkin Necessary for specific information , The latter is used to generate pkg-config and CMake file .
In the use of add_library() or add_executable() Before declaring any goals , Must call This function . This function is 5 individual Optional Parameters :
INCLUDE_DIRS- The export of the package contains the pathLIBRARIES- Library exported from projectCATKIN_DEPENDS- The project relies on othercatkinprojectDEPENDS- The project relies on noncatkinCMake project .CFG_EXTRAS- Other configuration options
3.5 、package.xml Introduce
The package list is a XML The file named package.xml Must include the root folder of any compatible package .package.xml Also a catkin Of package Necessary documents , It is the description file of the software package , In the earlier ROS edition (rosbuild Compiling system ) in , This document is called manifest.xml, Used to describe pacakge Basic information of . If you see something on the Internet ROS The project contains manifest.xml, Then it's mostly hydro Projects before version .pacakge.xml Contains package The name of 、 Version number 、 Content description 、 maintenance staff 、 Software license 、 Compile build tools 、 Compile dependencies 、 Operation dependency and other information .
package.xml file build_depend Must contain message_generation,run_depend Must contain message_runtime.
<pacakge> # Root tag file
<name> # Package name
<version> # Version number
<description> # Content description
<maintainer> # Maintainer
<license> # software license
<buildtool_depend> # Compile build tools , Usually it is catkin
<depend> # Specifies that the dependency is compiled 、 export 、 Run the required dependencies , The most commonly used
<build_depend> # Compile dependencies
<build_export_depend> # Export dependencies
<exec_depend> # Run dependency
<test_depend> # Test case dependencies
<doc_depend> # Document dependencies 版权声明
本文为[YOULANSHENGMENG]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/113/202204232049111523.html
边栏推荐
- Reentrant function
- Preliminary analysis of Airbase
- go struct
- MySQL进阶之表的增删改查
- [matlab 2016 use mex command to find editor visual studio 2019]
- Automatic heap dump using MBean
- laravel 发送邮件
- Awk example skills
- pytorch 1.7. The model saved by X training cannot be loaded in version 1.4 or earlier
- 1. Finishing huazi Mianjing -- 1
猜你喜欢

Gsi-ecm digital platform for engineering construction management
airbase 初步分析
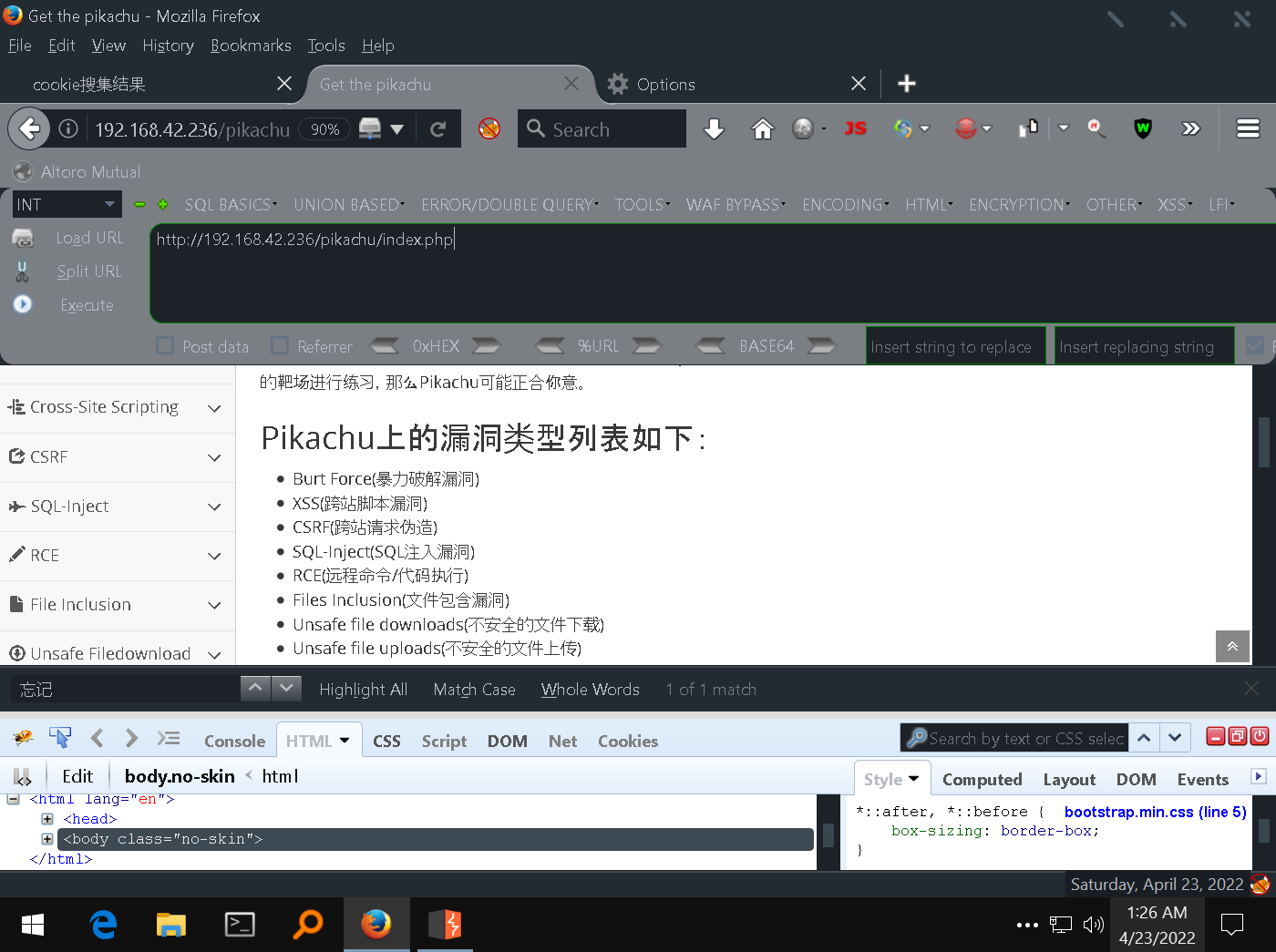
3-5通过XSS获取cookie以及XSS后台管理系统的使用

Zhongchuang storage | how to choose a useful distributed storage cloud disk
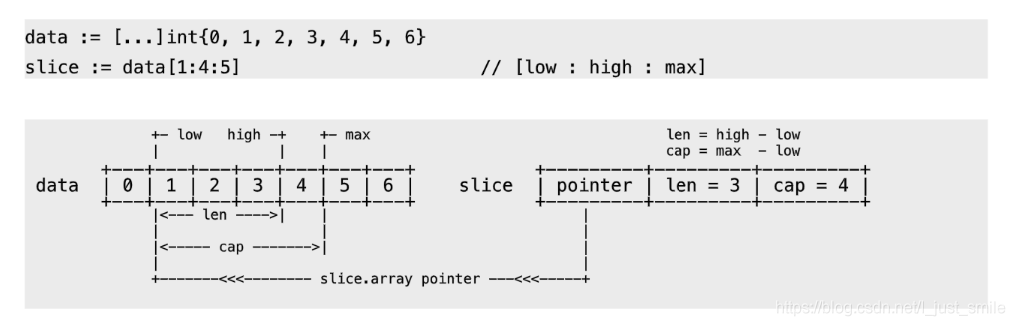
go slice
Question brushing plan - depth first search DFS (I)
Chrome 94 introduces the controversial idle detection API, which apple and Mozilla oppose
GSI-ECM工程建设管理数字化平台

MySQL基础之写表(创建表)

笔记本电脑卡顿怎么办?教你一键重装系统让电脑“复活”
随机推荐
阿里云回应用户注册信息泄露事件
41. 缺失的第一个正数
Rust更适合经验较少的程序员?
Assertionerror: invalid device ID and runtimeerror: CUDA error: invalid device ordinal
go defer
Sequential state
LeetCode-279-完全平方数
MySQL数据库常识之储存引擎
Selenium displays webdriverwait
laravel 发送邮件
Win 11K in 100 days, super complete learning guide for job transfer test
管道和xargs
引入结构化并发,Swift 5.5 发布!
Communication between RING3 and ring0
Summary and effect analysis of methods for calculating binocular parallax
pikachuxss如何获取cookie靶场,返回首页总是失败
wait、waitpid
Centos7 builds MySQL master-slave replication from scratch (avoid stepping on the pit)
Express ③ (use express to write interface and cross domain related issues)
Common problems in deploying projects with laravel and composer for PHP