当前位置:网站首页>[现代控制理论]6_稳定性_李雅普诺夫_Lyapunov
[现代控制理论]6_稳定性_李雅普诺夫_Lyapunov
2022-08-09 11:11:00 【王崇卫】
[现代控制理论]11_现代控制理论串讲_完结_pdf获取
[现代控制理论]10_可观测性与分离原理_观测器与控制器
[现代控制理论]9_状态观测器设计_龙伯格观测器
[现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink
[现代控制理论]8_LQR控制器_simulink
[现代控制理论]7_线性控制器设计_Linear Controller Design
[现代控制理论]6_稳定性_李雅普诺夫_Lyapunov
[现代控制理论]5_系统的可控性_controllability
[现代控制理论]4_PhasePortrait爱情故事动态系统分析
[现代控制理论]3_Phase_portrait 相图 相轨迹
[工程数学]1_特征值与特征向量
[现代控制理论]2_state-space状态空间方程
我将之前的笔记合并生成了pdf,如果有有需要,可以关注公众号“王崇卫”,在后台输入“DR_CAN笔记”。
视频链接:
https://www.bilibili.com/video/BV1vx411V7EH?spm_id_from=333.999.0.0
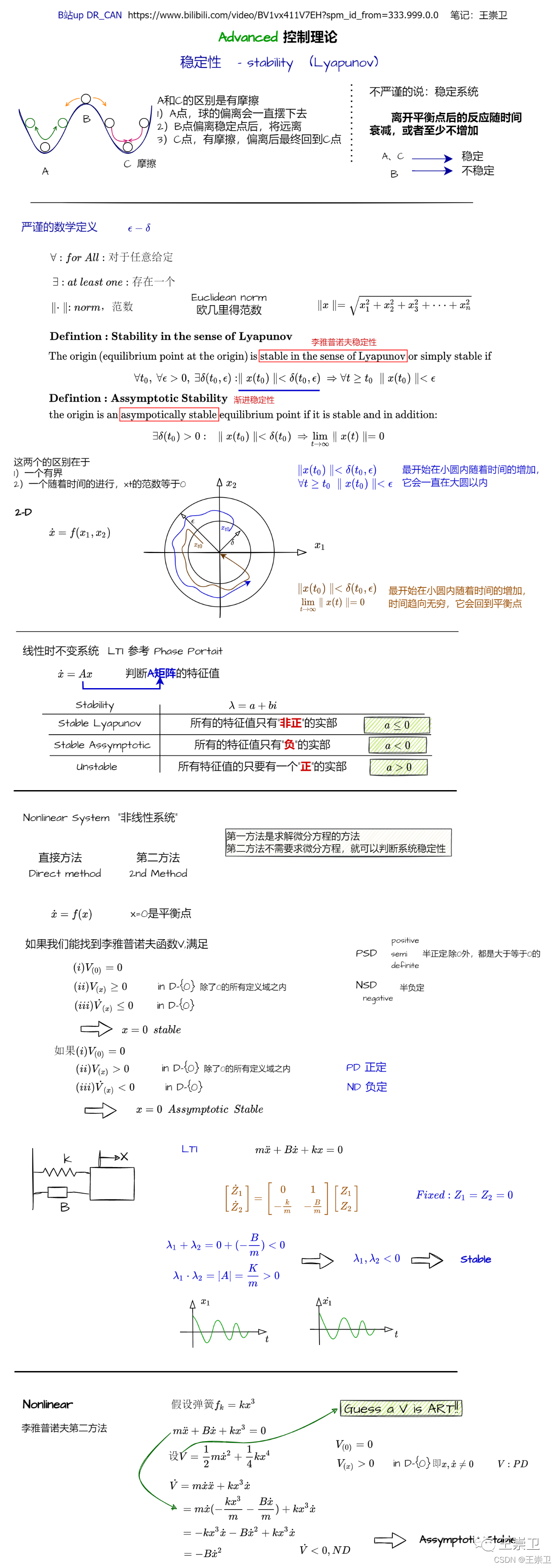
稳定性_李雅普诺夫_Lyapunov
以三个小球不同的情况,简单的定义系统的稳定:“离开平衡点后的反应随时间衰减,或者至少不增加”
李雅普诺夫稳定性:有界的。渐进稳定性:随着时间的进行,xt的范数会等于0。
判断A矩阵的特征值:
- 所有特征值只有“非正”的实部为Lyapunov稳定性,
- 所有特征值值只有“负”的实部为渐进稳定性,
- 所有的特征值只要有一个“正”的实部,那么系统不稳定。
介绍了李雅普诺夫的两种方法。
- 直接方法:求解微分方程的方法。
- 第二方法:寻找李雅普诺夫函数。
通过滑块弹簧阻尼系统展示了李雅普诺夫第二方法,找V的艺术。
被抛弃的写随笔公众号改写技术文章了,感兴趣的可以关注公众号:王崇卫
边栏推荐
猜你喜欢



随机推荐
STM32使用静态队列保存数据
ECCV 2022 Oral | CCPL: 一种通用的关联性保留损失函数实现通用风格迁移
PAT1013 并查集 DFS(查找联通分量的个数)
fidder为什么不会抓包的问题
最长回文子串
使用.NET简单实现一个Redis的高性能克隆版(四、五)
golang interface “坑记录“
PAT1003
CAN总线发送数据
b站up主:空狐公子 --矩阵求导(分母布局)课程笔记
富媒体在客服IM消息通信中的秒发实践
ACM01背包问题
PTA习题 分类统计字符个数(C)
mysql8.0和navicat premium15下载安装
enum in c language
Oracle Database Architecture
依赖注入(Dependency Injection)框架是如何实现的
剖析STM32F103时钟系统
matlab fcnchk 函数用法
gdb 10.2的安装