当前位置:网站首页>Theory and practice of laser slam in dark blue College - Chapter 2 (odometer calibration)
Theory and practice of laser slam in dark blue College - Chapter 2 (odometer calibration)
2022-04-23 17:51:00 【ppipp1109】
direct method :
1. Job description :
-
This job is to use the direct linear method to correct the odometer of the robot .
-
The... Used in this operation bag data , Path is odom_ws/bag/odom.bag( It's too big , Not uploaded to github).
-
In this assignment , You need to implement three functions , Respectively :
-
main.cpp, The first 340 In a row cal_delta_distance() function , The function of this function is to give the position and attitude of two odometers , Calculate the pose difference between the two poses .
-
Odom_Calib.cpp, The first 23 That's ok Add_Data() function , The function of this function is to construct overdetermined equations Ax=b, Specific reference PPT.
-
Odom_Calib.cpp, The first 44 That's ok Solve() function , The function of this function is to 2 The overdetermined equations constructed in are solved .
2. The running process of this program is :
-
function launch file :roslaunch calib_odom odomCalib.launch.
-
stay 1 Under normal circumstances , function rviz,fix_frame Choose as odom_frame. stay Add Add three items to the tab Path news . A subscription topic by :odom_path_pub_; A subscription topic by :scan_path_pub_; The last one is :calib_path_pub_. Choose different colors .
-
Enter into odom_ws/bag Under the table of contents , Operation instruction :rosbag play - -clock odom.bag.( There is no space in the middle of the double horizontal line )
-
If everything goes well , You can see that the terminal running the correction program will print data , also rviz You can see two paths . When the printed data reaches a certain amount , Then you can start to correct .
-
The order of correction is , stay calib_flag Of topic Next data release :rostopic pub /calib_flag std_msgs/Empty “{}”.
-
After the program is corrected, the corresponding correction matrix will be output , And will be in rviz The third path is shown in , namely calib_path. You can observe the odometer path odom_path And correction path _calib_path To judge the effect of this correction .
3. result

4. Calibration results :
correct_matrix:
0.943991 0.133506 -0.000139669
-0.0142447 13.4325 0.000335469
0.000152577 40.2952 0.000234346
calibration over!!!!
5. Code :
cal_delta_distence function
// Solve the pose difference between the two frames of data
// That is to solve the current pose stay Last time Coordinates in a coordinate system
Eigen::Vector3d cal_delta_distence(Eigen::Vector3d odom_pose)
{
Eigen::Vector3d d_pos; //return value
now_pos = odom_pose;
//TODO:
// The way the vector rotates , Axis angle
d_pos = now_pos - last_pos;
Eigen::AngleAxisd temp(last_pos(2),Eigen::Vector3d(0,0,1));
Eigen::Matrix3d trans=temp.matrix().inverse();
d_pos = trans*d_pos;
last_pos = now_pos;
// Matrix method II
// Eigen::Matrix3d trans_temp;
// trans_temp<< cos(last_pos(2)), -sin(last_pos(2)), 0,
// sin(last_pos(2)), cos(last_pos(2)), 0,
// 0, 0, 1;
//
// d_pos = now_pos - last_pos;
// d_pos = trans_temp.transpose()*d_pos;
// last_pos = now_pos;
//end of TODO:
return d_pos;
}Add_Data() function

The overdetermined equations needed to construct the least squares
Ax = b
*/
bool OdomCalib::Add_Data(Eigen::Vector3d Odom, Eigen::Vector3d scan)
{
if (now_len < INT_MAX) {
//TODO: Construct overdetermined equations
Eigen::Matrix<double,3,9> trans_a;
Eigen::Vector3d vector__b;
trans_a << Odom(0), Odom(1),Odom(2),0,0,0,0,0,0,
0,0,0,Odom(0), Odom(1),Odom(2),0,0,0,
0,0,0,0,0,0,Odom(0), Odom(1),Odom(2);
vector__b << scan(0),scan(1),scan(2);
// Give to the A and B
A.block<3,9>(3*now_len,0) = trans_a;
b.block<3,1>(3*now_len,0) = vector__b;
//end of TODO
now_len++;
return true;
} else {
return false;
}
}Solve function , Generally, matrix decomposition is used , You can choose svd or QR Decomposition and other different ways , The difference was not significant .
Eigen::Matrix3d OdomCalib::Solve()
{
Eigen::Matrix3d correct_matrix;
//TODO: Solve linear least squares
// Eigen::Matrix<double, 9, 1> params;
// // params = (A.transpose() * A).inverse() * A.transpose() * b;
// params = A.bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(b);
// std::cout << params.transpose() << std::endl;
// for (size_t i = 0; i < 3; i++) {
// correct_matrix.block<1, 3>(i, 0) = params.block<3, 1>(i * 3, 0).transpose();
// }
Eigen::Matrix<double,9,1> X_ = A.colPivHouseholderQr().solve(b);
correct_matrix << X_(0),X_(1),X_(2),X_(3),X_(4),X_(5),X_(6),X_(7),X_(8);
//end of TODO
return correct_matrix;
}A model-based approach :
Model form :





Code :
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/Geometry>
#include <fstream>
#include <iostream>
#include <math.h>
#include <string>
using namespace std;
string scan_match_file = "./scan_match.txt";
string odom_file = "./odom.txt";
int main(int argc, char** argv)
{
// Time and matching value of placing lidar t_s s_x s_y s_th
vector<vector<double>> s_data;
// The time of placing the wheel speedometer and the angular speed of the left and right wheels t_r w_L w_R
vector<vector<double>> r_data;
ifstream fin_s(scan_match_file);
ifstream fin_r(odom_file);
if (!fin_s || !fin_r) {
cerr << " Please be there scan_match.txt and odom.txt Run this program in the directory of " << endl;
return 1;
}
// Read the matching value of lidar
while (!fin_s.eof()) {
double s_t, s_x, s_y, s_th;
fin_s >> s_t >> s_x >> s_y >> s_th;
s_data.push_back(vector<double>({ s_t, s_x, s_y, s_th }));
}
fin_s.close();
// Read the angular velocity of the two wheels
while (!fin_r.eof()) {
double t_r, w_L, w_R;
fin_r >> t_r >> w_L >> w_R;
r_data.push_back(vector<double>({ t_r, w_L, w_R }));
}
fin_r.close();
// First step : Calculate the intermediate variable J_21 and J_22
Eigen::MatrixXd A;
Eigen::VectorXd b;
// Set data length
A.conservativeResize(5000, 2);
b.conservativeResize(5000);
A.setZero();
b.setZero();
size_t id_r = 0;
size_t id_s = 0;
double last_rt = r_data[0][0];
double w_Lt = 0;
double w_Rt = 0;
while (id_s < 5000) {
// Laser matching information
const double& s_t = s_data[id_s][0];
const double& s_th = s_data[id_s][3];
// Odometer information
const double& r_t = r_data[id_r][0];
const double& w_L = r_data[id_r][1];
const double& w_R = r_data[id_r][2];
++id_r;
// stay 2 Carry out odometer angle integration within the frame laser matching time
if (r_t < s_t) {
double dt = r_t - last_rt;
w_Lt += w_L * dt;
w_Rt += w_R * dt;
last_rt = r_t;
} else {
double dt = s_t - last_rt;
w_Lt += w_L * dt;
w_Rt += w_R * dt;
last_rt = s_t;
// fill A, b matrix
//TODO: (3~5 lines)
A(id_s, 0) = w_Lt;
A(id_s, 1) = w_Rt;
b[id_s] = s_th;
//end of TODO
w_Lt = 0;
w_Rt = 0;
++id_s;
}
}
// Carry out the least square solution
Eigen::Vector2d J21J22;
//TODO: (1~2 lines)
J21J22 = A.bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(b);
// J21J22 = A.colPivHouseholderQr().solve(b);
//end of TODO
const double& J21 = J21J22(0);
const double& J22 = J21J22(1);
cout << "J21: " << J21 << endl;
cout << "J22: " << J22 << endl;
// The second step , Solving wheel spacing b
Eigen::VectorXd C;
Eigen::VectorXd S;
// Set data length
C.conservativeResize(10000);
S.conservativeResize(10000);
C.setZero();
S.setZero();
id_r = 0;
id_s = 0;
last_rt = r_data[0][0];
double th = 0;
double cx = 0;
double cy = 0;
while (id_s < 5000) {
// Laser matching information
const double& s_t = s_data[id_s][0];
const double& s_x = s_data[id_s][1];
const double& s_y = s_data[id_s][2];
// Odometer information
const double& r_t = r_data[id_r][0];
const double& w_L = r_data[id_r][1];
const double& w_R = r_data[id_r][2];
++id_r;
// stay 2 Odometer position integration is performed within the frame laser matching time
if (r_t < s_t) {
double dt = r_t - last_rt;
cx += 0.5 * (-J21 * w_L * dt + J22 * w_R * dt) * cos(th);
cy += 0.5 * (-J21 * w_L * dt + J22 * w_R * dt) * sin(th);
th += (J21 * w_L + J22 * w_R) * dt;
last_rt = r_t;
} else {
double dt = s_t - last_rt;
cx += 0.5 * (-J21 * w_L * dt + J22 * w_R * dt) * cos(th);
cy += 0.5 * (-J21 * w_L * dt + J22 * w_R * dt) * sin(th);
th += (J21 * w_L + J22 * w_R) * dt;
last_rt = s_t;
// fill C, S matrix
//TODO: (4~5 lines)
C[id_s * 2] = cx;
C[id_s * 2 + 1] = cy;
S[id_s * 2] = s_x;
S[id_s * 2 + 1] = s_y;
//end of TODO
cx = 0;
cy = 0;
th = 0;
++id_s;
}
}
// Carry out the least square solution , Calculation b, r_L, r_R
double b_wheel;
double r_L;
double r_R;
//TODO: (3~5 lines)
b_wheel = C.colPivHouseholderQr().solve(S)[0];
r_L = -J21 * b_wheel;
r_R = J22 * b_wheel;
//end of TODO
cout << "b: " << b_wheel << endl;
cout << "r_L: " << r_L << endl;
cout << "r_R: " << r_R << endl;
cout << " Refer to the answer : Wheel spacing b by 0.6m about , The radius of the two wheels is 0.1m about " << endl;
return 0;
}
Running results
J21: -0.163886
J22: 0.170575
b: 0.59796
r_L: 0.0979974
r_R: 0.101997
Refer to the answer : Wheel spacing b by 0.6m about , The radius of the two wheels is 0.1m about
cmakelist and odom.txt and scan_match.txt Follow up sorting and uploading
版权声明
本文为[ppipp1109]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230549076180.html
边栏推荐
- 394. String decoding - auxiliary stack
- C1小笔记【任务训练篇二】
- JS parsing and execution process
- Qt 修改UI没有生效
- Entity Framework core captures database changes
- 2022 judgment questions and answers for operation of refrigeration and air conditioning equipment
- Cross domain settings of Chrome browser -- including new and old versions
- Client example analysis of easymodbustcp
- Operation of 2022 mobile crane driver national question bank simulation examination platform
- Leak detection and vacancy filling (VIII)
猜你喜欢

Qt error: /usr/bin/ld: cannot find -lGL: No such file or directory

HCIP第五次实验
102. Sequence traversal of binary tree
Qt 修改UI没有生效
Hcip fifth experiment

Leak detection and vacancy filling (6)
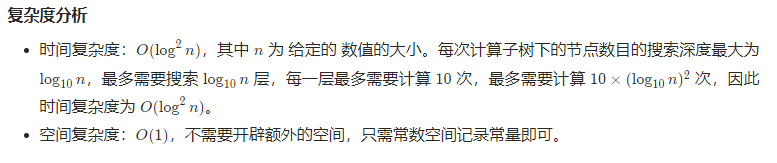
440. 字典序的第K小数字(困难)-字典树-数节点-字节跳动高频题
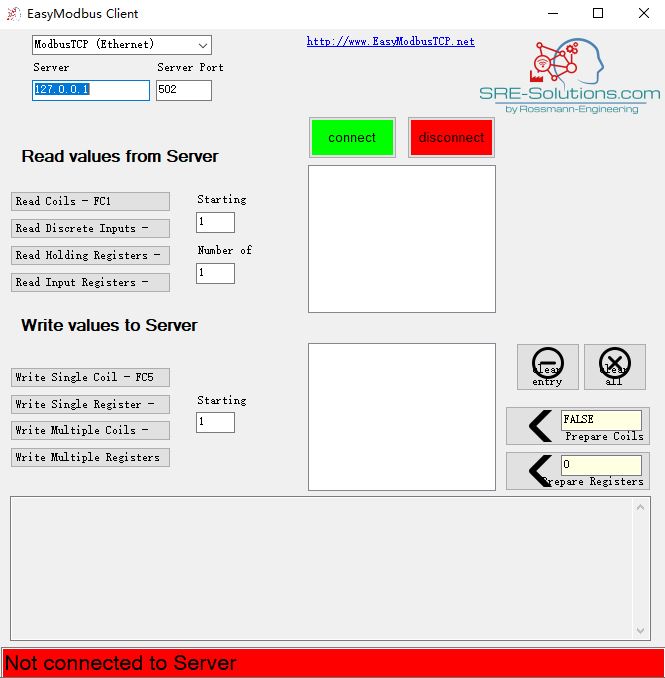
Client example analysis of easymodbustcp
STM32 entry development board choose wildfire or punctual atom?

Error in created hook: "referenceerror:" promise "undefined“
随机推荐
1217_ Generating target files using scons
SystemVerilog (VI) - variable
Detailed deployment of flask project
198. 打家劫舍-动态规划
In embedded system, must the program code in flash be moved to ram to run?
ES6 new method
41. 缺失的第一个正数
31. 下一个排列
The method of changing a value in the array and a value in the object of wechat applet
Vite configure proxy proxy to solve cross domain
QT modification UI does not take effect
uni-app黑马优购项目学习记录(下)
Summary of common SQL statements
Gaode map search, drag and drop query address
2021 Great Wall Cup WP
31. Next arrangement
Type judgment in [untitled] JS
Write a regular
MySQL进阶之索引【分类,性能分析,使用,设计原则】
Add animation to the picture under V-for timing