当前位置:网站首页>mAPH - Waymo dataset
mAPH - Waymo dataset
2022-08-11 06:16:00 【zhSunw】
mAPH
I believe you have read itWaymoStudents who test papers on the dataset will find itmAPH这个指标,But I checked the information on the whole network and there is no relevant explanation(Except you need to climb the wall to enterWaymo官网下的What’s Next).
So in order to help the next person who wants to understand but can't find the relevant explanation,Here is the official introduction screenshot and my understanding(其实不难)
First, a screenshot of the official website is given,It is good if the students with better foundation can read it by themselves: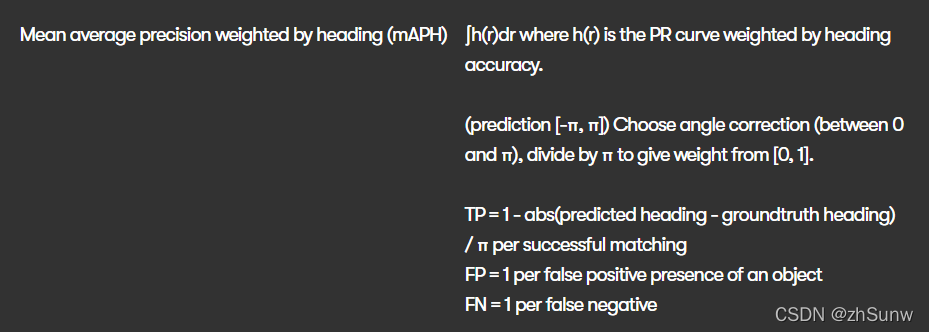
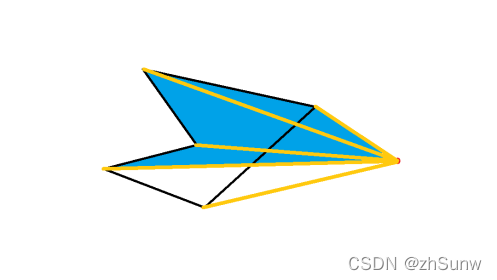
首先我们回顾一下 m A P mAP mAP:计算出 P r e c i s i o n Precision Precision与 R e c a l l Recall Recallafter two parameters,以 P r e c i s i o n Precision Precision和 R e c a l l Recall Recallare the vertical and horizontal axes, respectively,就可以画出 P r e c i s i o n − R e c a l l ( P − R ) Precision-Recall(P-R) Precision−Recall(P−R)曲线,如图:
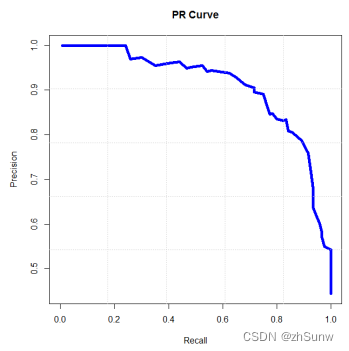
P − R P-R P−RThe area enclosed by the curve is called A v e r a g e P r e c i s i o n ( A P ) Average Precision(AP) AveragePrecision(AP).
其中:
P r e c i s i o n = T P / ( T P + F P ) Precision=TP/(TP+FP) Precision=TP/(TP+FP)
R e c a l l = T P / ( T P + F N ) Recall=TP/(TP+FN) Recall=TP/(TP+FN)
至于 T P 、 T N 、 F P 、 F N TP、TN、FP、FN TP、TN、FP、FNThe sum of the quantities of the four parameters is the total sample size,The classification results they represent are shown in the table below: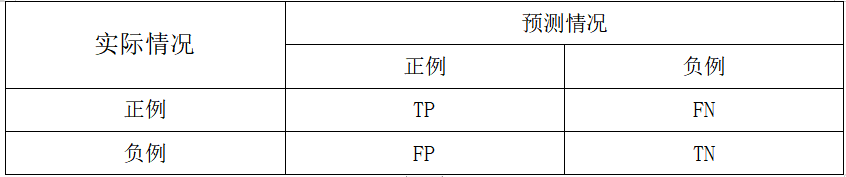
Finally, we look back to the official website to explain,不难知道,它的计算方法与mAPThe difference lies in the drawingP-RThe graph is predicted by headingAccuracy weighted,即TPparameters will be predictedheading加权.predictedheading与真实的headingThe angle difference is A(A值域为 [ 0 , Π ] [0,Π] [0,Π]),for every real exampleTP计算方法如下:
T P = 1 − A / Π TP = 1 - A/Π TP=1−A/Π
( m A P mAP mAPof each target T P TP TP为1,即混淆矩阵中TPThe number of and here becomes the weighted for each targetTP之和)
All other indicators remain unchanged,Draw this way P − R P-R P−Rfigure and calculatemAP就是 m A P H mAPH mAPH了.
边栏推荐
- GBase 8s存储结构简介及空间管理
- 《现代密码学》学习笔记——第三章 分组密码
- centos—docker安装mysql
- windows下的redis安装及密码修改
- 梅科尔工作室-深度学习第二讲 BP神经网络
- CVPR2020:Seeing Through Fog Without Seeing Fog
- LiDAR Snowfall Simulation for Robust 3D Object Detection
- >>数据管理:读书笔记|第一章 数据管理
- Redis哨兵模式
- Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
猜你喜欢


随机推荐
梅科尔工作室-HarmonyOS应用开发的第二次培训
MGRE环境下的OSPF综合实验
mAPH——Waymo数据集
360°大视野安全帽识别系统-深度学习智能视频分析
2022年最新安全帽佩戴识别系统
SCNet:Semantic Consistency Networks for 3D Object Detection
GBase 8a 并行技术
2021-05-10
架构设计杂谈
GBase 8s存储结构简介及空间管理
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第三次培训
若依分离版—增加通知公告预览功能
uniapp 在HBuilder X中配置微信小程序开发工具
NodeRed系列—发送消息给emqx
若依分离版—移动端开发通知公告功能
《现代密码学》学习笔记——第四章 公钥密码
>>技术应用:用于 REST API 开发和测试的 10 大工具
CNN-based Point Cloud De-Noising
OSI TCP/IP学习笔记
LiDAR Snowfall Simulation for Robust 3D Object Detection