当前位置:网站首页>Notes on common basic usage of eigen Library
Notes on common basic usage of eigen Library
2022-04-23 17:53:00 【ppipp1109】
ps: eigen See more , When I write it myself, there are always some usages that I can't remember the specific function name , I would like to sum it up as a reminder .
official doc: eigen The most authoritative official website
Catalog
Eigen Special matrix generation
Eigen The matrix is partitioned
Eigen Matrix single element operation
Eigen Solve linear equations Ax = b
Eigen Matrix definition
#include <Eigen/Dense>
Matrix<double, 3, 3> A; // Fixed rows and cols. Same as Matrix3d.
Matrix<double, 3, Dynamic> B; // Fixed rows, dynamic cols.
Matrix<double, Dynamic, Dynamic> C; // Full dynamic. Same as MatrixXd.
Matrix<double, 3, 3, RowMajor> E; // Row major; default is column-major.
Matrix3f P, Q, R; // 3x3 float matrix.
Vector3f x, y, z; // 3x1 float matrix.
RowVector3f a, b, c; // 1x3 float matrix.
VectorXd v; // Dynamic column vector of doubles
// Eigen // Matlab // comments
x.size() // length(x) // vector size
C.rows() // size(C,1) // number of rows
C.cols() // size(C,2) // number of columns
x(i) // x(i+1) // Matlab is 1-based
C(i,j) // C(i+1,j+1) //Eigen Based on using
// Basic usage
// Eigen // Matlab // comments
x.size() // length(x) // vector size
C.rows() // size(C,1) // number of rows
C.cols() // size(C,2) // number of columns
x(i) // x(i+1) // Matlab is 1-based
C(i, j) // C(i+1,j+1) //
A.resize(4, 4); // Runtime error if assertions are on.
B.resize(4, 9); // Runtime error if assertions are on.
A.resize(3, 3); // Ok; size didn't change.
B.resize(3, 9); // Ok; only dynamic cols changed.
A << 1, 2, 3, // Initialize A. The elements can also be
4, 5, 6, // matrices, which are stacked along cols
7, 8, 9; // and then the rows are stacked.
B << A, A, A; // B is three horizontally stacked A's.
A.fill(10); // Fill A with all 10's.Eigen Special matrix generation
// Eigen // Matlab
MatrixXd::Identity(rows,cols) // eye(rows,cols)
C.setIdentity(rows,cols) // C = eye(rows,cols)
MatrixXd::Zero(rows,cols) // zeros(rows,cols)
C.setZero(rows,cols) // C = ones(rows,cols)
MatrixXd::Ones(rows,cols) // ones(rows,cols)
C.setOnes(rows,cols) // C = ones(rows,cols)
MatrixXd::Random(rows,cols) // rand(rows,cols)*2-1 // MatrixXd::Random returns uniform random numbers in (-1, 1).
C.setRandom(rows,cols) // C = rand(rows,cols)*2-1
VectorXd::LinSpaced(size,low,high) // linspace(low,high,size)'
v.setLinSpaced(size,low,high) // v = linspace(low,high,size)'Eigen The matrix is partitioned
// Matrix slicing and blocks. All expressions listed here are read/write.
// Templated size versions are faster. Note that Matlab is 1-based (a size N
// vector is x(1)...x(N)).
// Eigen // Matlab
x.head(n) // x(1:n)
x.head<n>() // x(1:n)
x.tail(n) // x(end - n + 1: end)
x.tail<n>() // x(end - n + 1: end)
x.segment(i, n) // x(i+1 : i+n)
x.segment<n>(i) // x(i+1 : i+n)
P.block(i, j, rows, cols) // P(i+1 : i+rows, j+1 : j+cols)
P.block<rows, cols>(i, j) // P(i+1 : i+rows, j+1 : j+cols)
P.row(i) // P(i+1, :)
P.col(j) // P(:, j+1)
P.leftCols<cols>() // P(:, 1:cols)
P.leftCols(cols) // P(:, 1:cols)
P.middleCols<cols>(j) // P(:, j+1:j+cols)
P.middleCols(j, cols) // P(:, j+1:j+cols)
P.rightCols<cols>() // P(:, end-cols+1:end)
P.rightCols(cols) // P(:, end-cols+1:end)
P.topRows<rows>() // P(1:rows, :)
P.topRows(rows) // P(1:rows, :)
P.middleRows<rows>(i) // P(i+1:i+rows, :)
P.middleRows(i, rows) // P(i+1:i+rows, :)
P.bottomRows<rows>() // P(end-rows+1:end, :)
P.bottomRows(rows) // P(end-rows+1:end, :)
P.topLeftCorner(rows, cols) // P(1:rows, 1:cols)
P.topRightCorner(rows, cols) // P(1:rows, end-cols+1:end)
P.bottomLeftCorner(rows, cols) // P(end-rows+1:end, 1:cols)
P.bottomRightCorner(rows, cols) // P(end-rows+1:end, end-cols+1:end)
P.topLeftCorner<rows,cols>() // P(1:rows, 1:cols)
P.topRightCorner<rows,cols>() // P(1:rows, end-cols+1:end)
P.bottomLeftCorner<rows,cols>() // P(end-rows+1:end, 1:cols)
P.bottomRightCorner<rows,cols>() // P(end-rows+1:end, end-cols+1:end)Eigen Matrix element exchange
// Of particular note is Eigen's swap function which is highly optimized.
// Eigen // Matlab
R.row(i) = P.col(j); // R(i, :) = P(:, i)
R.col(j1).swap(mat1.col(j2)); // R(:, [j1 j2]) = R(:, [j2, j1])Eigen Matrix transposition
// Views, transpose, etc; all read-write except for .adjoint().
// Eigen // Matlab
R.adjoint() // R'
R.transpose() // R.' or conj(R')
R.diagonal() // diag(R)
x.asDiagonal() // diag(x)
R.transpose().colwise().reverse(); // rot90(R)
R.conjugate() // conj(R)Eigen matrix product
// All the same as Matlab, but matlab doesn't have *= style operators.
// Matrix-vector. Matrix-matrix. Matrix-scalar.
y = M*x; R = P*Q; R = P*s;
a = b*M; R = P - Q; R = s*P;
a *= M; R = P + Q; R = P/s;
R *= Q; R = s*P;
R += Q; R *= s;
R -= Q; R /= s;Eigen Matrix single element operation
// Vectorized operations on each element independently
// Eigen // Matlab
R = P.cwiseProduct(Q); // R = P .* Q
R = P.array() * s.array();// R = P .* s
R = P.cwiseQuotient(Q); // R = P ./ Q
R = P.array() / Q.array();// R = P ./ Q
R = P.array() + s.array();// R = P + s
R = P.array() - s.array();// R = P - s
R.array() += s; // R = R + s
R.array() -= s; // R = R - s
R.array() < Q.array(); // R < Q
R.array() <= Q.array(); // R <= Q
R.cwiseInverse(); // 1 ./ P
R.array().inverse(); // 1 ./ P
R.array().sin() // sin(P)
R.array().cos() // cos(P)
R.array().pow(s) // P .^ s
R.array().square() // P .^ 2
R.array().cube() // P .^ 3
R.cwiseSqrt() // sqrt(P)
R.array().sqrt() // sqrt(P)
R.array().exp() // exp(P)
R.array().log() // log(P)
R.cwiseMax(P) // max(R, P)
R.array().max(P.array()) // max(R, P)
R.cwiseMin(P) // min(R, P)
R.array().min(P.array()) // min(R, P)
R.cwiseAbs() // abs(P)
R.array().abs() // abs(P)
R.cwiseAbs2() // abs(P.^2)
R.array().abs2() // abs(P.^2)
(R.array() < s).select(P,Q); // (R < s ? P : Q)Eigen Matrix Simplification
// Reductions.
int r, c;
// Eigen // Matlab
R.minCoeff() // min(R(:))
R.maxCoeff() // max(R(:))
s = R.minCoeff(&r, &c) // [s, i] = min(R(:)); [r, c] = ind2sub(size(R), i);
s = R.maxCoeff(&r, &c) // [s, i] = max(R(:)); [r, c] = ind2sub(size(R), i);
R.sum() // sum(R(:))
R.colwise().sum() // sum(R)
R.rowwise().sum() // sum(R, 2) or sum(R')'
R.prod() // prod(R(:))
R.colwise().prod() // prod(R)
R.rowwise().prod() // prod(R, 2) or prod(R')'
R.trace() // trace(R)
R.all() // all(R(:))
R.colwise().all() // all(R)
R.rowwise().all() // all(R, 2)
R.any() // any(R(:))
R.colwise().any() // any(R)
R.rowwise().any() // any(R, 2)Eigen Dot matrix
// Dot products, norms, etc.
// Eigen // Matlab
x.norm() // norm(x). Note that norm(R) doesn't work in Eigen.
x.squaredNorm() // dot(x, x) Note the equivalence is not true for complex
x.dot(y) // dot(x, y)
x.cross(y) // cross(x, y) Requires #include <Eigen/Geometry>
Eigen Matrix type conversion
Type conversion
// Eigen // Matlab
A.cast<double>(); // double(A)
A.cast<float>(); // single(A)
A.cast<int>(); // int32(A)
A.real(); // real(A)
A.imag(); // imag(A)
// if the original type equals destination type, no work is doneEigen Solve linear equations Ax = b
// Solve Ax = b. Result stored in x. Matlab: x = A \ b.
x = A.ldlt().solve(b)); // A sym. p.s.d. #include <Eigen/Cholesky>
x = A.llt() .solve(b)); // A sym. p.d. #include <Eigen/Cholesky>
x = A.lu() .solve(b)); // Stable and fast. #include <Eigen/LU>
x = A.qr() .solve(b)); // No pivoting. #include <Eigen/QR>
x = A.svd() .solve(b)); // Stable, slowest. #include <Eigen/SVD>
// .ldlt() -> .matrixL() and .matrixD()
// .llt() -> .matrixL()
// .lu() -> .matrixL() and .matrixU()
// .qr() -> .matrixQ() and .matrixR()
// .svd() -> .matrixU(), .singularValues(), and .matrixV()Eigen Matrix eigenvalues
// Eigenvalue problems
// Eigen // Matlab
A.eigenvalues(); // eig(A);
EigenSolver<Matrix3d> eig(A); // [vec val] = eig(A)
eig.eigenvalues(); // diag(val)
eig.eigenvectors(); // vec
// For self-adjoint matrices use SelfAdjointEigenSolver<>Reference link
C++ Matrix library Eigen Quick start - python27 - Blog Garden
版权声明
本文为[ppipp1109]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230549075615.html
边栏推荐
- JS get link? The following parameter name or value, according to the URL? Judge the parameters after
- 開期貨,開戶雲安全還是相信期貨公司的軟件?
- 编译原理 求first集 follow集 select集预测分析表 判断符号串是否符合文法定义(有源码!!!)
- Learning record of uni app dark horse yougou project (Part 2)
- 587. 安装栅栏 / 剑指 Offer II 014. 字符串中的变位词
- cartographer_ There is no problem compiling node, but running the bug that hangs directly
- 122. 买卖股票的最佳时机 II-一次遍历
- QT modification UI does not take effect
- 198. 打家劫舍-动态规划
- Tell the truth of TS
猜你喜欢

2022江西光伏展,中国分布式光伏展会,南昌太阳能利用展
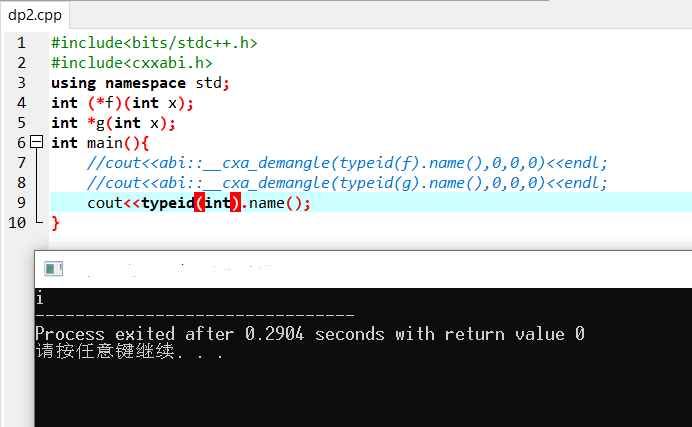
On the method of outputting the complete name of typeID from GCC
394. 字符串解码-辅助栈

470. 用 Rand7() 实现 Rand10()
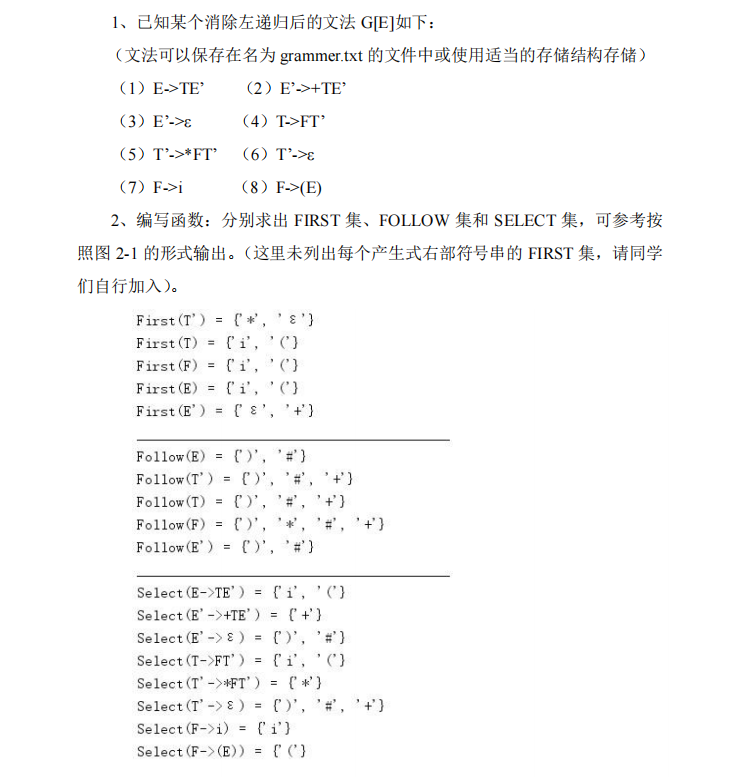
编译原理 求first集 follow集 select集预测分析表 判断符号串是否符合文法定义(有源码!!!)
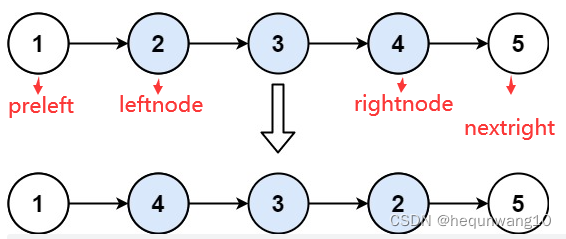
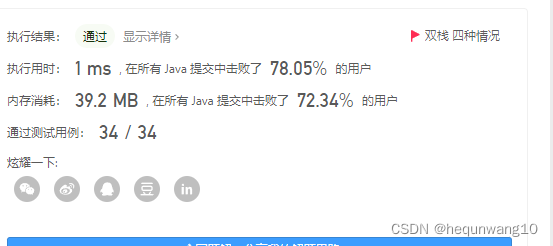
92. Reverse linked list II byte skipping high frequency question

Double pointer advanced -- leetcode title -- container with the most water
Laser slam theory and practice of dark blue College Chapter 3 laser radar distortion removal exercise
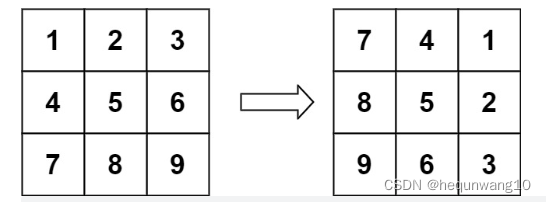
48. 旋转图像
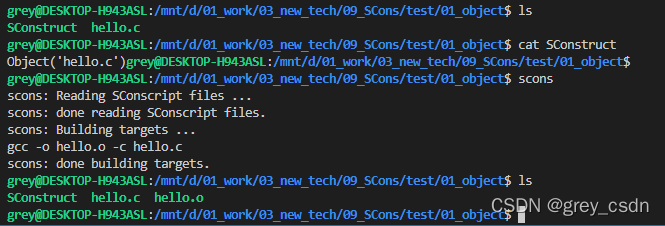
1217_ Generating target files using scons
随机推荐
394. String decoding - auxiliary stack
198. Looting - Dynamic Planning
[二叉数] 二叉树的最大深度+N叉树的最大深度
Cloud native Virtualization: building edge computing instances based on kubevirt
C language implements memcpy, memset, strcpy, strncpy, StrCmp, strncmp and strlen
Ouvrir des contrats à terme, ouvrir des comptes en nuage ou faire confiance aux logiciels des sociétés à terme?
2022年广东省安全员A证第三批(主要负责人)特种作业证考试题库及在线模拟考试
Summary of common server error codes
Matlab / Simulink simulation of double closed loop DC speed regulation system
Open futures, open an account, cloud security or trust the software of futures companies?
2021长城杯WP
编译原理 求first集 follow集 select集预测分析表 判断符号串是否符合文法定义(有源码!!!)
2022年上海市安全员C证操作证考试题库及模拟考试
2022江西储能技术展会,中国电池展,动力电池展,燃料电池展
Chrome浏览器的跨域设置----包含新老版本两种设置
Uniapp custom search box adaptation applet alignment capsule
SystemVerilog (VI) - variable
QT modification UI does not take effect
On the problem of V-IF display and hiding
587. 安装栅栏 / 剑指 Offer II 014. 字符串中的变位词