当前位置:网站首页>机器人控制器编程实践指导书旧版-实践五 数字舵机(执行器)
机器人控制器编程实践指导书旧版-实践五 数字舵机(执行器)
2022-08-10 17:28:00 【zhangrelay】
适用于UNO/2560/DUE/ESP8266/ESP32,2021年之前使用版本。

5.1 实践目的
- 掌握Arduino[ESP32]对数字舵机控制的软硬件测试。
5.2 实践设备
- PC机一台
- Arduino[ESP32]开发板及配件等
- 万用表和示波器等
5.3 实践原理
- 初级:无
- 中级:旋钮控制舵机转角

示意图
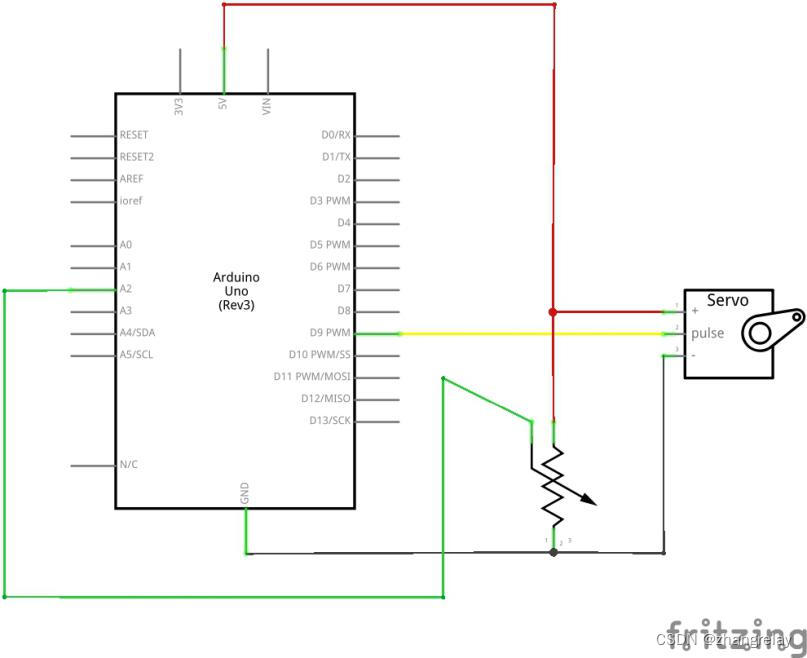
原理图
- 高级(ROS选修):
使用主题servo消息控制舵机角度。
#if (Arduino[ESP32] >= 100)
#include <Arduino[ESP32].h>
#else
#include <WProgram.h>
#endif
#include <Servo.h>
#include <ros.h>
#include <std_msgs/UInt16.h>
ros::NodeHandle nh;
Servo servo;
void servo_cb( const std_msgs::UInt16& cmd_msg){
servo.write(cmd_msg.data); //set servo angle, should be from 0-180
digitalWrite(13, HIGH-digitalRead(13)); //toggle led
}
ros::Subscriber<std_msgs::UInt16> sub("servo", servo_cb);
void setup(){
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
servo.attach(9); //attach it to pin 9
}
void loop(){
nh.spinOnce();
delay(1);
}
5.4 实践内容
阅读5.3中示意图、原理图和代码,在Arduino[ESP32]平台上完成实践。
5.5 实践问题
5.5.1 舵机角度如何调节?
控制信号是一种脉宽调制(PWM)信号。脉冲的高电平持续1到2毫秒(ms),也就是1000到2000微秒(µs)。在1000µs时,舵机左满舵。在2000µs时,右满舵。不过你可以通过调整脉宽来实现更大或者更小范围内的运动。控制脉冲的低电平持续20毫秒。每经过20毫秒(50次每秒),就要再次跳变为高电平,否则舵机就可能罢工,难以保持稳定。
5.5.2 舵机相应速度和转角精度能否调节?
舵机用PWM信号控制速度和转角,从而实现易控制、精度高和速度快的目的.
5.6 实践总结
回顾本次实践,遇到哪些问题,如何解决,经验和启发有哪些?
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
评分:
|
边栏推荐
猜你喜欢




随机推荐
R语言ggplot2可视化:使用ggpubr包的text_grob函数和as_ggplot函数可视化文本段落(将指定文本段落可视化出来、指定文本段可视化为图像)、face参数指定文本的字体样式
aliexpress API 接入说明
产品说明丨Android端使用MobPush快速集成方法
瑞虎8 PRO产品性能分析,一文读懂究竟何为“全域动力科技旗舰”
自适应模糊神经网络与bp神经网络的区别
网易云信亮相LiveVideoStackCon2022,解构基于WebRTC的开源低延时播放器实践
Selenium - 如何使用隐式、显示、强制元素等待?
fastjson链分析(1.2.22-47)
Return the next higher prime number
leetcode:281. 锯齿迭代器
【接入指南 之 直接接入】手把手教你快速上手接入HONOR Connect平台(中)
leetcode:337. 打家劫舍 III
Redis下载安装教程 (windows)
同一块中出现两个 * 就不能正常显示
机器人控制器编程实践指导书旧版-实践四 步进电机(执行器)
R语言使用oneway.test函数执行单因素方差分析(One-Way ANOVA)、使用数据集的子集数据进行单因素方差分析(subset函数筛选数据子集)
Oracle Install [email protected] 7.6
产品-Axure9英文版,A页面内a1状态跳转B页面的b2状态,(条件跳转状态)
Error creating bean with name ‘sqlSessionFactory‘ defined in class path reso「建议收藏」
DASCTF2022.07赋能赛 WEB题目复现