当前位置:网站首页>EMMC/SD学习小记
EMMC/SD学习小记
2022-04-23 06:13:00 【MyeDy】
eMMC之分区管理、总线协议和工作模式
JDEDC EMMC 协议中文
SD卡协议中文2.0 3.0
EMMC4.4 非Boot模式读流程
- 等待74个时钟
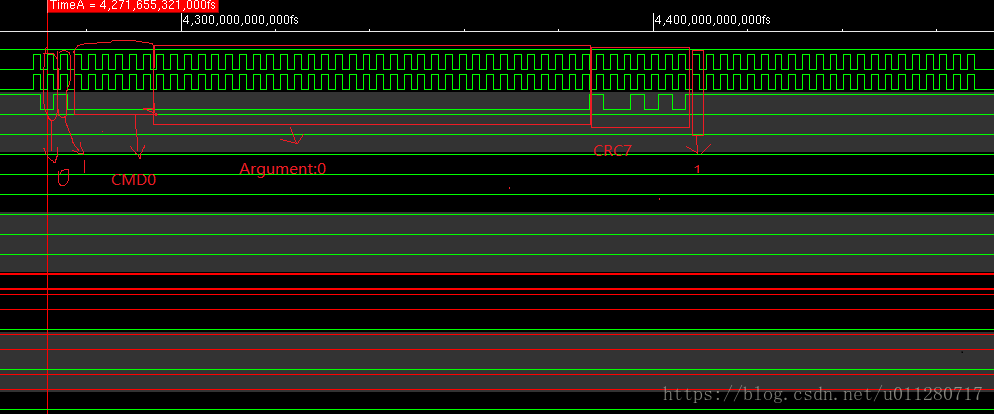
- CMD0 复位emmc至idle状态
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD0 | bc | 00000000 | - | GO_IDLE_STATE | 复位设备至idle状态 |
| CMD0 | bc | f0f0f0f0 | - | GO_PRE_IDLE_STATE | 复位设备至pre-idle状态 |
| CMD0 | - | fffffffa | - | GO_INITIATION | 启动替换的引导操作 |
- 发送CMD1获取OCR
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD1 | bc | [31:0] OCR | R3 | SEND_OP_COND | 请求idle状态设备发送在CMD线发送其OCR结构 |

- CMD2获取CID
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD2 | bc | [31:0] 填充位 | R2 | ALL_SEND_CID | 请求设备在CMD线发送其CID编号 |

- CMD3分配RCA
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD3 | ac | [31:16] RCA [15:0] 填充位 | R1 | SET_RELATIVE_ADDR | 分配相对地址到设备 |

- CMD9获取CSD
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD9 | ac | [31:16] RCA [15:0] 填充位 | R2 | SEND_CSD | SEND_CSD寻址的设备在CMD线上发送其设备专有数据(CSD) |

- CMD7 设置transfer状态
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD7 | ac | [31:16] RCA [15:0] 填充位 | R2 | SELECT/DESELECT_C ARD | 在stand-by和transfer状态之间或program- ming和disconnect状态之间切换设备的命令。两种情况下,设备以其自己的相对地址被选定并以其他地址被取消选定;地址0取消所有设备的选定。 |

- CMD13获取设备状态
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD13 | ac | [31:16] RCA [15:0] 填充位 | R1 | SEND_STATUS | 寻址的设备发送其状态寄存器 |

- 根据ECSD switch不同的位宽。(可选) CMD8, CMD13, CMD6
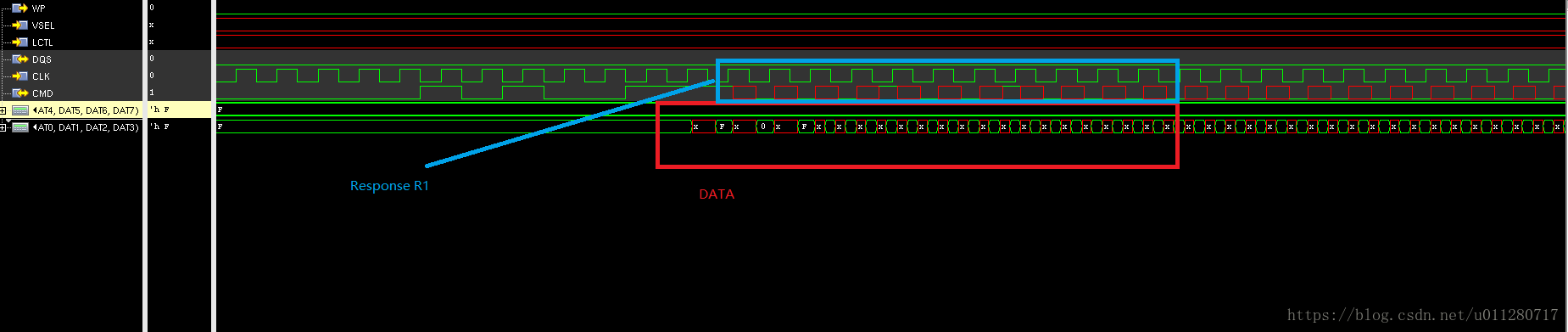
- CMD18读数据
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD18 | adtc | [31:0] 数据地址1 | R1 | READ_MULTIPLE_ BLOCK | 从设备向主机连续传输数据块,直至被停止命令中断,或所要求传输的块数。 |

SD1.0 初始化流程

- 等待74个时钟
- CMD0 复位SD卡至idle状态

- CMD8 发送SD 卡接口条件,包含了主机支持的电压信息,并询问卡是否支持。保留位应该设置为0。
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD8 | bcr | [31:12]保留位,[11:8]VHS,[7:0]检查模式 | R7 | SEND_IF_COND | 发送SD 卡接口条件,包含了主机支持的电压信息,并询问卡是否支持。保留位应该设置为0。 |

- ACMD41 发送卡的支持信息(HCS)。发送ACMD需要先发送CMD55。
| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| CMD55 | ac | [31:16]RCA [15:0]填充位 | R1 | APP_CMD | 告诉卡,下个命令是特定应用命令,而不是标准命令。 |

| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| ACMD41 | bcr | [31]保留位 [30]HCS(OCR30) [29:24]保留位 [23:0]VddVdd 电压(OCR[23:0]) | R3 | SD_SEND_OP_COND | 发送卡的支持信息(HCS),并要求卡通过命令线返回OCR 寄存器内容。当卡收到SEND_IF_COND 时,HCS 是有效的。保留位设为0。CCS 位对应OCR[30] |

- 接下来SD卡初始化就是CMD2和CMD3,大致是和MMC卡流程是一样的。后面有一些命令SD和MMC还是不同的,比如switch的命令就不同,SD卡使用的是ACMD6来定义数据的宽度等等,而MMC是使用CMD8来switch。

| 命令索引 | 类型 | 参数 | 应答 | 缩写 | 命令说明 |
|---|---|---|---|---|---|
| ACMD6 | ac | [31:2]填充位 [1:0]总线宽度 | R1 | SET_BUS_WIDTH | 定义数据总线的宽度(‘00’=1bit,‘10’=4bit)。接受的数据总线定义在SCR 寄存器中。 |

版权声明
本文为[MyeDy]所创,转载请带上原文链接,感谢
https://blog.csdn.net/u011280717/article/details/79948297
边栏推荐
- 1.1 PyTorch和神经网络
- Machine learning notes 1: learning ideas
- PyTorch 22. PyTorch常用代码段合集
- 红外传感器控制开关
- unhandled system error, NCCL version 2.7.8
- Paddleocr image text extraction
- 【点云系列】FoldingNet:Point Cloud Auto encoder via Deep Grid Deformation
- RISCV MMU 概述
- torch. mm() torch. sparse. mm() torch. bmm() torch. Mul () torch The difference between matmul()
- Machine learning II: logistic regression classification based on Iris data set
猜你喜欢

使用 trt 的int8 量化和推断 onnx 模型

face_recognition人脸检测

WinForm scroll bar beautification

【3D形状重建系列】Implicit Functions in Feature Space for 3D Shape Reconstruction and Completion

Write a wechat double open gadget to your girlfriend

Mysql database installation and configuration details

【点云系列】点云隐式表达相关论文概要

【点云系列】Multi-view Neural Human Rendering (NHR)
Chapter 2 pytoch foundation 1

GEE配置本地开发环境
随机推荐
[dynamic programming] Yang Hui triangle
PyTorch最佳实践和代码编写风格指南
PyTorch 11.正则化
【动态规划】三角形最小路径和
【点云系列】Neural Opacity Point Cloud(NOPC)
Paddleocr image text extraction
Systrace 解析
主流 RTOS 评估
Chapter 2 pytoch foundation 2
Device Tree 详解
Use originpro express for free
PyTorch中的一些常见数据类型转换方法,与list和np.ndarray的转换方法
UEFI学习01-ARM AARCH64编译、ArmPlatformPriPeiCore(SEC)
Visual studio 2019 installation and use
机器学习 三: 基于逻辑回归的分类预测
Pymysql connection database
【動態規劃】不同路徑2
【点云系列】Learning Representations and Generative Models for 3D pointclouds
红外传感器控制开关
【点云系列】Multi-view Neural Human Rendering (NHR)