当前位置:网站首页>【中央任务调度系统—通信开发】
【中央任务调度系统—通信开发】
2022-08-11 09:55:00 【2345VOR】
一、 方案设计目标
学习socket通信、掌握C++编程、熟悉ROS通信机制,完成中央任务调度系统与ROS系统之间数据的交互。
二、 技术指标
上位机开发工具指定为Visual Studio或者Qt;
在Windows上创建客户端,ROS上创建服务器端;
开发上位机人机交互界面,最终实现Windows端“哈喽,轻舟机器人!”“Hello,AI Word!”“1024 1024 1024”等内容与ROS端互传。
三、 主要研究内容
开发上位机,选择Qt,实现效果如图3-1所示: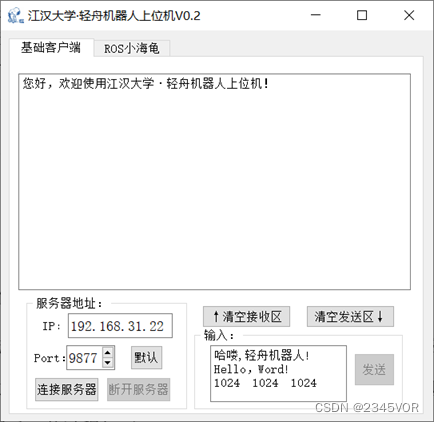
图3-1
关于TCP通信
该方案使用TCP通信,TCP协议全称: 传输控制协议, 顾名思义, 就是要对数据的传输进行一定的控制。TCP通信的开始过程可以简述为三次握手,其过程如下:
1, TCP服务器时刻准备接受客户端进程的连接请求, 此时服务器就进入了 LISTEN(监听)状态
2, TCP客户端进程向服务器发出连接请求报文,此时,TCP客户端进程进入了 SYN-SENT(同步已发送状态)状态。
3, TCP服务器收到请求报文后, 如果同意连接, 则发出确认报文。
4, TCP客户端进程收到确认后还, 要向服务器给出确认。
5, 此时,TCP连接建立,客户端进入ESTABLISHED(已建立连接)状态。当服务器收到客户端的确认后也进入ESTABLISHED状态,此后双方就可以开始通信了。
TCP断开连接可以概述为四次挥手:
1, 客户端进程发出连接释放报文,并且停止发送数据。此时客户端进入FIN-WAIT-1(终止等待1)状态。
2, 服务器收到连接释放报文,发出确认报文,此时服务端就进入了CLOSE-WAIT(关闭等待)状态。
3, 客户端收到服务器的确认请求后,此时客户端就进入FIN-WAIT-2(终止等待2)状态,等待服务器发送连接释放报文(在这之前还需要接受服务器发送的最终数据)
4, 服务器将最后的数据发送完毕后,就向客户端发送连接释放报文,此时,服务器就进入了LAST-ACK(最后确认)状态,等待客户端的确认。
5, 客户端收到服务器的连接释放报文后,必须发出确认,当客户端撤销相应的TCB后,才进入CLOSED状态。
6, 服务器只要收到了客户端发出的确认,立即进入CLOSED状态。双方就结束通信。
使用TCP通信将ROS作为服务端,Windows作为服务端,主要代码如下:
import socket
import threading
HOST = '192.168.31.22' # 默认本地IP
PORT = 9877
class RecvThread(threading.Thread):
def __init__(self, connection):
threading.Thread.__init__(self)
self.isEnd = 0
self.connection = connection
def run(self):
while True:
recv_msg = self.connection.recv(1024)
if recv_msg:
buf = recv_msg.decode("gbk")
print('[---Recv---]\n' + buf + '\n[---End---]')
else:
break
self.isEnd = 1
print('\n Disconnection!!!')
def main():
global HOST
global PORT
HOST = socket.gethostbyname(socket.gethostname())
print('欢迎使用江汉大学`轻舟机器人服务器端!')
print('请输入本地IP, 回车空缺默认为:' + str(HOST))
ip = input('in:')
if ip:
HOST = str(ip)
print('请输入端口号,回车空缺默认为:'+ str(PORT))
port = input('in:')
if port:
PORT = int(port)
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.bind((HOST, PORT))
print('本地:' + str(sock.getsockname()))
sock.listen(5)
while True:
connection, address = sock.accept()
print('Connection success!')
print('对方:' + str(connection.getpeername()))
connection.send(b'welcome to server!')
connection.send("我是轻舟机器人".encode("gbk"))
t = RecvThread(connection)
t.start()
while t.isEnd == 0:
buff = input()
connection.send(buff.encode("gbk"))
connection.close()
sock.close()
if __name__ == '__main__':
main()
实现效果图3-2如下: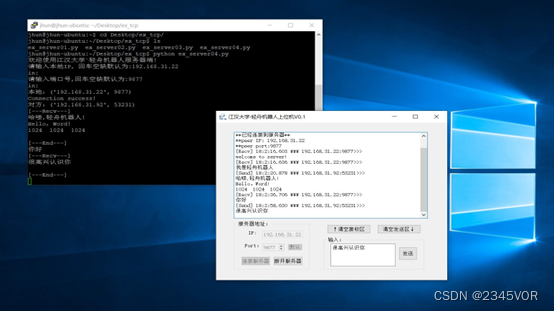
图3-2
至此已完成所有技术指标。
四、 技术创新点
在Windows上连接ROS小海龟并控制,Qt效果图如图4-1所示: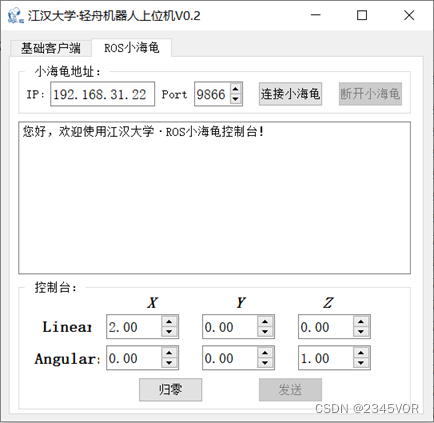
图4-1
整个系统通信方式如图4-2所示: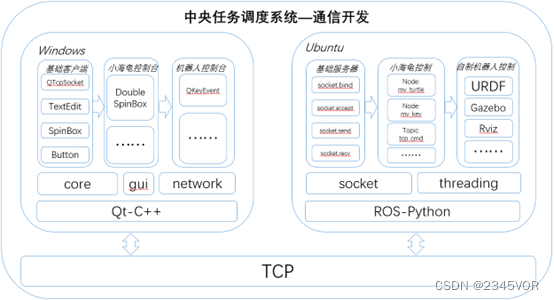
图4-2
主要代码如下:
from posixpath import split
import rospy
from geometry_msgs.msg import Twist # 发布的消息类型
import socket
HOST = '192.168.31.22' # 默认本地IP
PORT = 9866
if __name__ == "__main__":
rospy.init_node("key_py")
pub = rospy.Publisher("/tcp_cmd", Twist, queue_size=1000)
rospy.Duration(3)
HOST = socket.gethostbyname(socket.gethostname())
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
sock.bind((HOST, PORT))
rospy.loginfo('本地:' + str(sock.getsockname()))
sock.listen(5)
# 发布数据
while not rospy.is_shutdown():
connection, address = sock.accept()
rospy.loginfo('Connection success!')
rospy.loginfo('对方:' + str(connection.getpeername()))
while True:
recv_msg = connection.recv(1024)
if recv_msg:
# rospy.loginfo(recv_msg.decode('gbk'))
buff = recv_msg.decode('gbk')
data = buff.split(',',5)
data = list(map(float, data))
rospy.loginfo(data)
# 创建数据
msg = Twist()
msg.linear.x = data[0]
msg.linear.y = data[1]
msg.linear.z = data[2]
msg.angular.x = data[3]
msg.angular.y = data[4]
msg.angular.z = data[5]
pub.publish(msg)
else:
rospy.loginfo('\n Disconnection!!!')
connection.close()
break
实现效果如下图4-3、4-4所示: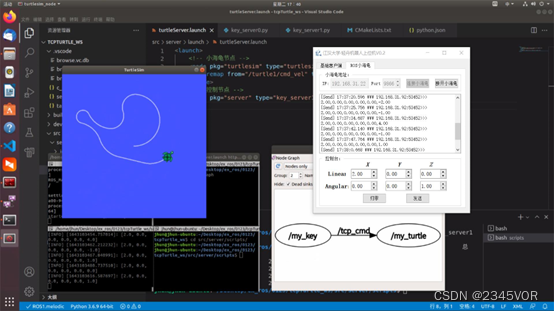
图4-3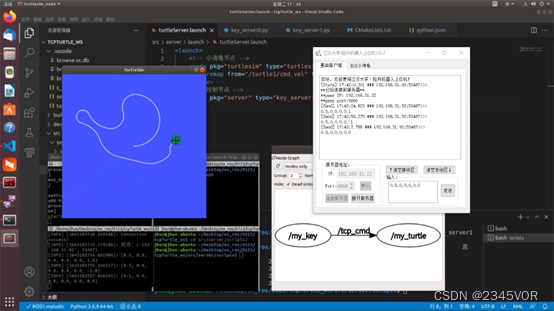
图4-4
五、 研究展望
自定义ROS机器人上位机跳读控制,控制阿克曼小车运动;
将上位机UI界面优化
边栏推荐
- Primavera Unifier advanced formula usage sharing
- oracle使用online_catalog收集数据,想看下online_catalog模式修改表字
- snapshot standby切换
- Three handshakes and four waves
- NT 内核函数原型大全
- Halcon算子解释
- 中移链EOSJS实战使用
- 零基础创作专业wordpress网站12-设置标签栏图标(favicon)
- wordpress插件开发02-首页文章自动摘要插件开发
- How to determine the neural network parameters, the number of neural network parameters calculation
猜你喜欢
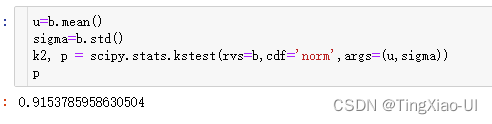
假设检验:正态性检验的那些bug——为什么对同一数据,normaltest和ktest会得到完全相反的结果?
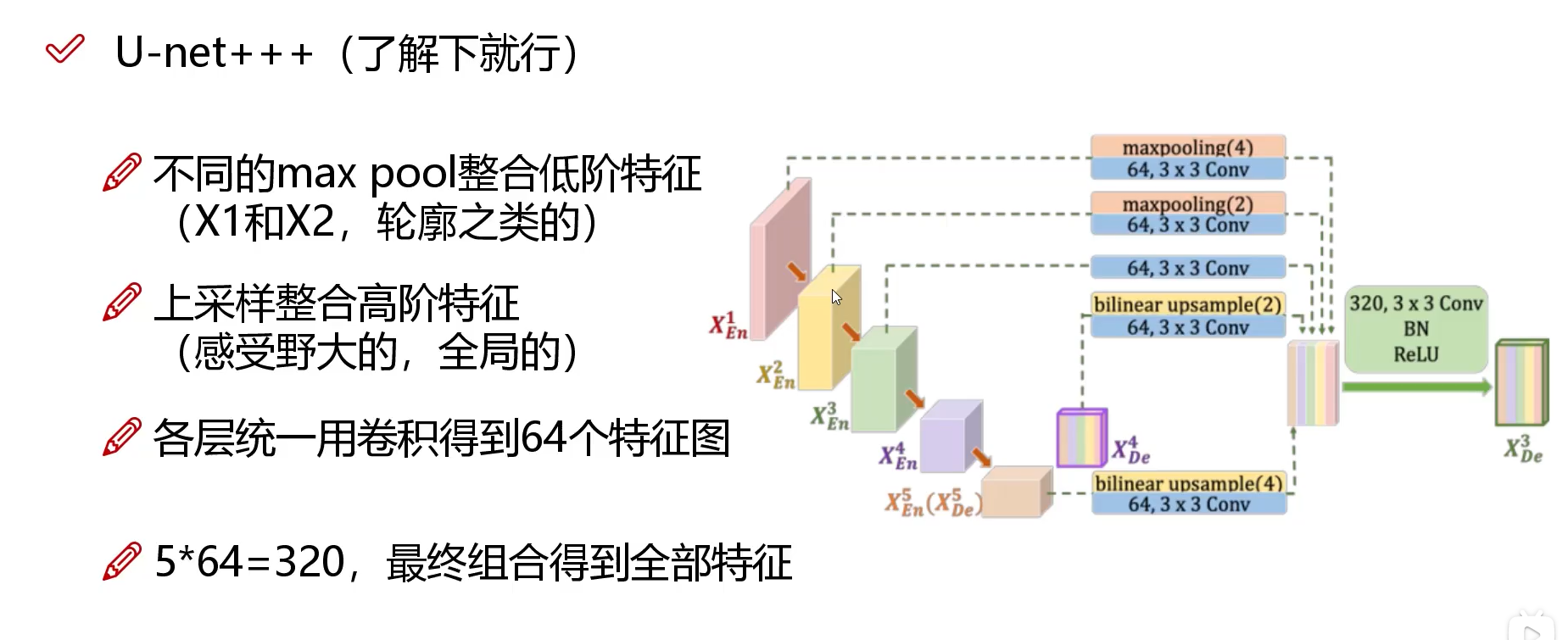
网络模型(U-net,U-net++, U-net+++)
wordpress插件开发03-简单的all in one seo 插件开发

软件定制开发——企业定制开发app软件的优势
![Array, string, date notes [Blue Bridge Cup]](/img/71/242804a93332fc545662b983f3aa2a.png)
Array, string, date notes [Blue Bridge Cup]
Primavera P6 Professional 21.12 Login exception case sharing
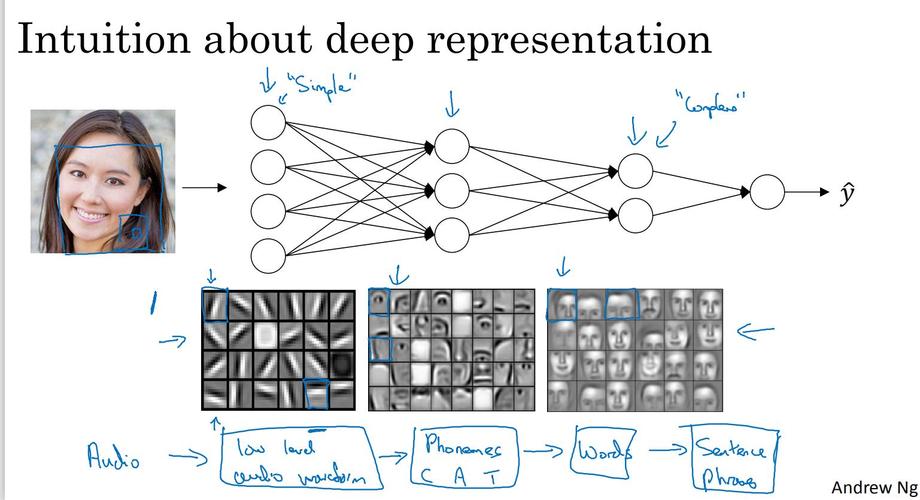
深度神经网络与人脑神经网络哪些区域有一定联系?
![[UE] 入坑](/img/18/a329706541e45eb0db4bf3f7f99973.png)
[UE] 入坑

网络流行简笔画图片大全,关于网络的简笔画图片
疫情当前,如何提高远程办公的效率,远程办公工具分享
随机推荐
MongoDB 对索引的创建查询修改删除 附代码
HStreamDB v0.9 released: Partition model extension, support for integration with external systems
Open Office XML 格式中的 Style 设计原理
【Prometheus】Alertmanager告警全方位讲解
力扣题解8/10
Database Basics
nodejs worker_threads的事件监听问题
MySQL表sql语句增删查改_修改_删除
Primavera P6 Professional 21.12 Login exception case sharing
HDRP shader 获取像素深度值和法线信息
Primavera P6 Professional 21.12 登录异常案例分享
最强大脑(2)
What is the difference between the qspi interface and the ordinary four-wire SPI interface?
A few days ago, Xiaohui went to Guizhou
软件定制开发——企业定制开发app软件的优势
数据库事务
收集awr
卷积神经网络梯度消失,神经网络中梯度的概念
pycharm 取消msyql表达式高亮
Dreamweaver网页作业——紫罗兰永恒花园动漫价绍网页 7页,含有table表格,js表单验证还有首页视频。以及列表页。浮