当前位置:网站首页>ROS package NMEA_ navsat_ Driver reads GPS and Beidou Positioning Information Notes
ROS package NMEA_ navsat_ Driver reads GPS and Beidou Positioning Information Notes
2022-04-23 17:53:00 【ppipp1109】
Hardware :ATGM332D + Serial debugging tools + GPS The antenna
Software : ubunutu 18.04 + ros
1. A serial port Reading data
sudo apt install cutecom
sudo cutecom // Set up Baud rate 9600 You can see the feedback data 2. nmea_navsat_driver Use of the bag
sudo apt-get install ros-melodic-nmea-navsat-driver libgps-devBe careful :nmea_navsat_driver Provide four nodes :nmea_topic_driver,
nmea_serial_driver,nmea_topic_serial_reader and nmea_socket_drivernmea_topic_serial_reader node
This node reads... From the serial port GPS data , And then it's packaged as nmea_msgs/Sentence data format , Post topics nmea_sentence.
nmea_topic_driver node
This node subscribes to topic nmea_sentence, And then according to NMEA0184 Protocol analysis , And publish the parsed data , The release topic is : Longitude and latitude /fix, Speed /vel,gps Time /time_reference And heading angle /heading.
nmea_serial_driver node
This node reads data from the serial port , Directly analyze the published data , amount to nmea_topic_driver Nodes and nmea_topic_serial_reader A combination of nodes .
github Source code :https://github.com/ros-drivers/nmea_navsat_driver
3. Open new Terminal The window opens ROS System ( relevant ROS The environment create 、ROS Package compilation and other basic knowledge must be checked on the Internet first ), Input
roscore
Open another new Terminal Window Publishing (Publish) Locate module information , Input
rosrun nmea_navsat_driver nmea_topic_serial_reader _port:=/dev/ttyUSB0 _baud:=9600
When publishing positioning module information , The window will not look like cutecom Keep displaying the latest positioning data as in , Will prompt SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'., Can be ignored . The ROS The packet passes the data through /nmea_sentence This Topic released , To verify that the location data is published successfully , Let's open a new Terminal Window read /nmea_sentence Information in , Input
rostopic echo /nmea_sentence4. function nmea_serial_driver node ;
It is necessary to close the second 3 All terminals in this section ,
roscd nmea_navsat_driver/launch/
sudo vim nmea_serial_driver.launch The baud rate is modified as follows 9600
<launch>
<!-- A simple launch file for the nmea_serial_driver node. -->
<arg name="port" default="/dev/ttyUSB0" />
<arg name="baud" default="9600" />
<arg name="frame_id" default="gps" />
<arg name="use_GNSS_time" default="False" />
<arg name="time_ref_source" default="gps" />
<arg name="useRMC" default="False" />
<node name="nmea_serial_driver_node" pkg="nmea_navsat_driver" type="nmea_serial_driver" output="screen">
<param name="port" value="$(arg port)"/>
<param name="baud" value="$(arg baud)" />
<param name="frame_id" value="$(arg frame_id)" />
<param name="use_GNSS_time" value="$(arg use_GNSS_time)" />
<param name="time_ref_source" value="$(arg time_ref_source)" />
<param name="useRMC" value="$(arg useRMC)" />
</node>
Open a terminal usb assignment , start-up launch file
sudo chmod 777 /dev/ttyUSB0
roslaunch nmea_navsat_driver nmea_serial_driver.launchOpen a new terminal , View the current gps Information
rostopic echo /fixReference link :
2. # Call sensor data _ROS Of sensors GPS practice _glietwx The blog of -CSDN Blog
3.(1)GNSS drive nmea_navsat_driver Use of feature packs _Qi Xiang Qi Xiang's blog -CSDN Blog
4. week50 nmea_navsat_driver Read GNSS Location information - Simple books
版权声明
本文为[ppipp1109]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230549075769.html
边栏推荐
- JS high frequency interview questions
- 440. 字典序的第K小数字(困难)-字典树-数节点-字节跳动高频题
- Arithmetic expression
- 198. 打家劫舍-动态规划
- 编译原理 求first集 follow集 select集预测分析表 判断符号串是否符合文法定义(有源码!!!)
- JS forms the items with the same name in the array object into the same array according to the name
- Cloud native Virtualization: building edge computing instances based on kubevirt
- Some questions some questions some questions some questions
- Anchor location - how to set the distance between the anchor and the top of the page. The anchor is located and offset from the top
- MySQL进阶之索引【分类,性能分析,使用,设计原则】
猜你喜欢
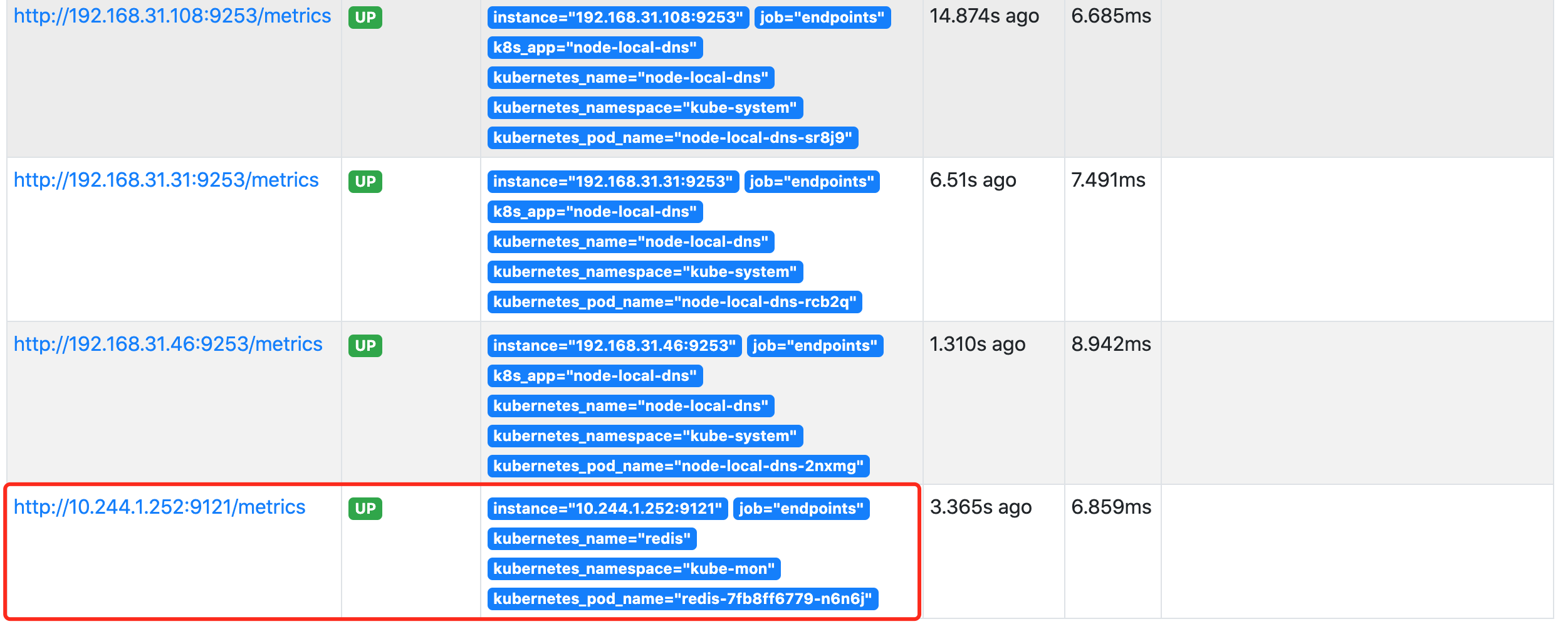
Kubernetes service discovery monitoring endpoints
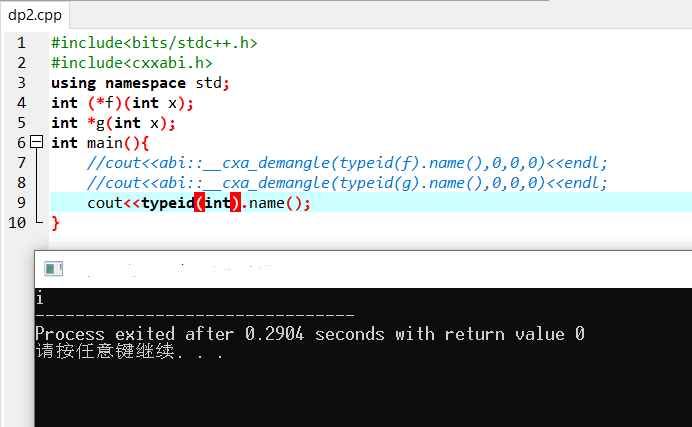
关于gcc输出typeid完整名的方法
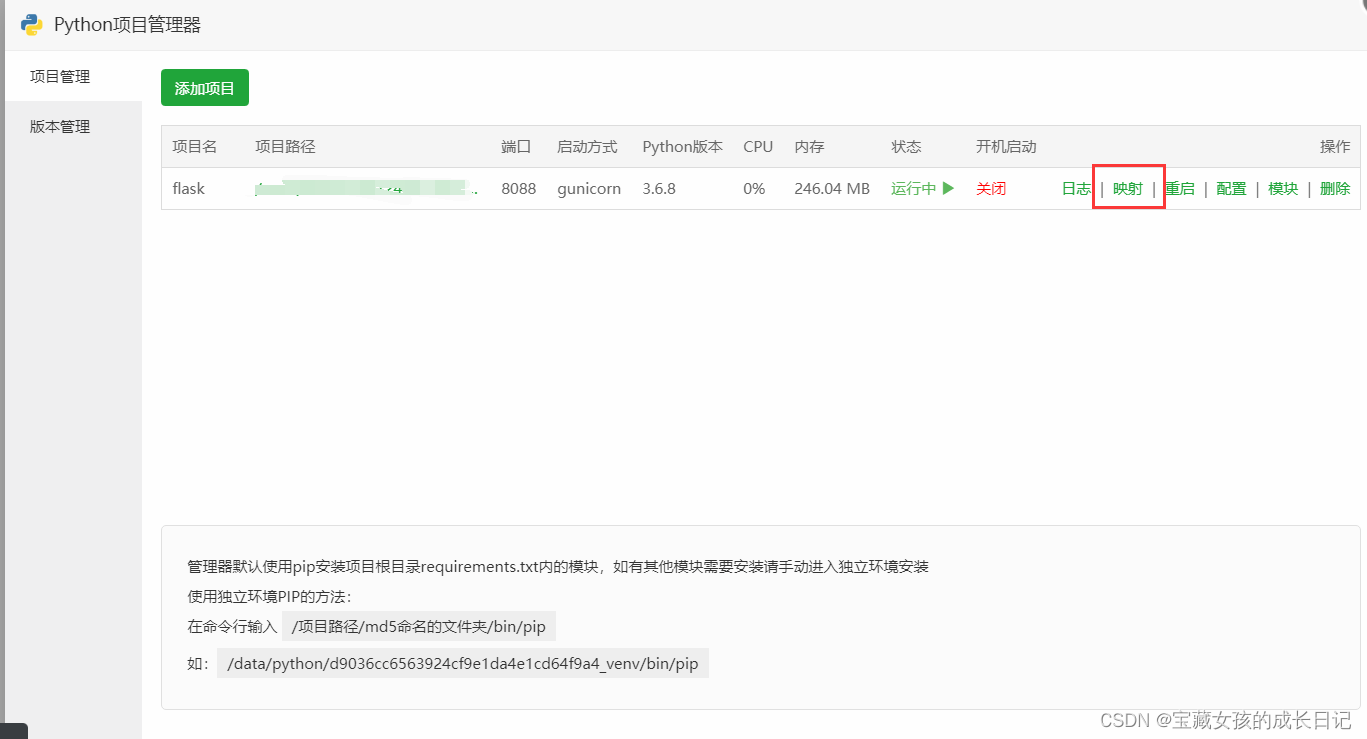
Detailed deployment of flask project
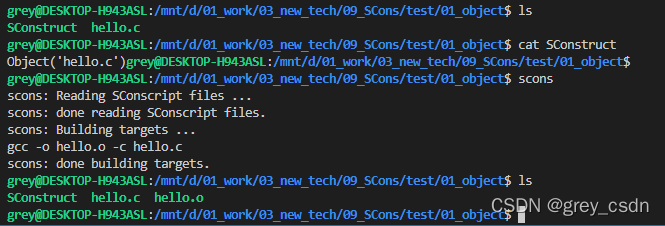
1217_ Generating target files using scons
JS get link? The following parameter name or value, according to the URL? Judge the parameters after
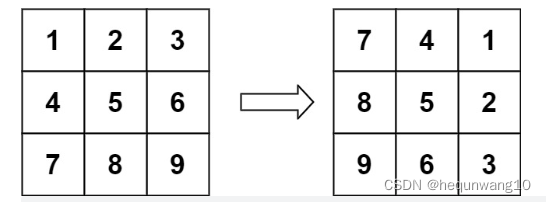
48. Rotate image
01 - get to know the advantages of sketch sketch

Chrome浏览器的跨域设置----包含新老版本两种设置

极致体验,揭晓抖音背后的音视频技术

2022 tea artist (primary) examination simulated 100 questions and simulated examination
随机推荐
Dry goods | how to extract thumbnails quickly?
Add drag and drop function to El dialog
Applet learning notes (I)
列表的使用-增删改查
Qt error: /usr/bin/ld: cannot find -lGL: No such file or directory
JVM class loading mechanism
Amount input box, used for recharge and withdrawal
2021 Great Wall Cup WP
Click Cancel to return to the previous page and modify the parameter value of the previous page, let pages = getcurrentpages() let prevpage = pages [pages. Length - 2] / / the data of the previous pag
Cross domain settings of Chrome browser -- including new and old versions
Anchor location - how to set the distance between the anchor and the top of the page. The anchor is located and offset from the top
239. 滑动窗口最大值(困难)-单向队列、大顶堆-字节跳动高频题
587. Install fence / Sword finger offer II 014 Anagrams in strings
.104History
41. 缺失的第一个正数
Some questions some questions some questions some questions
402. Remove K digits - greedy
31. Next arrangement
Summary of common SQL statements
198. 打家劫舍-动态规划