当前位置:网站首页>Matlab / Simulink simulation of double closed loop DC speed regulation system
Matlab / Simulink simulation of double closed loop DC speed regulation system
2022-04-23 17:30:00 【Chloroplasts don't forget to breathe】
matlab/simulink Build files 、 complete ppt and word The report : Click... To view resources
One 、 System principle and block diagram
Because the speed single closed-loop system can not fully control the dynamic process of current as required , For some production machines, different speed and current values are required under different production conditions , That is, there are two kinds of negative feedback of speed and current , Therefore, speed and current regulators are adopted .ACR Form an inner ring ,ASR Form an outer ring , Double closed-loop speed regulation system .
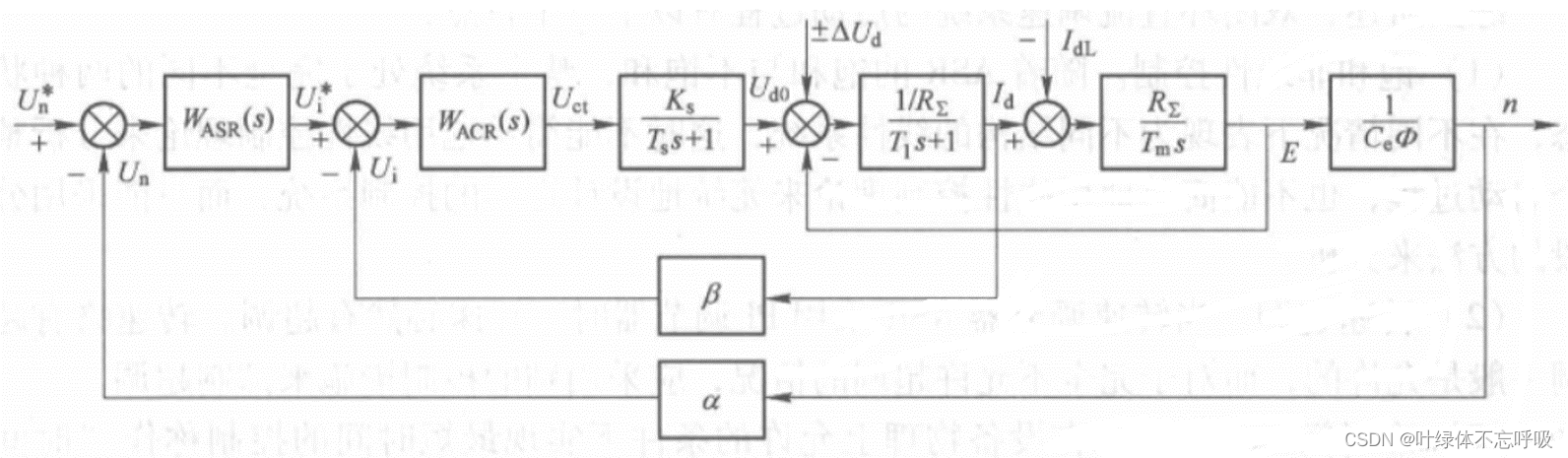
In actual modeling , There will be some differences in the system , The feedback link should become a low-pass filter with a small inertia link , The input should also have a corresponding inertia link .( The following figure shows the current ring and speed converter respectively )

Two 、 Parameter calculation and design

When designing double closed-loop speed regulation system , Generally, the inner ring is first followed by the outer ring , The structure and parameters of the regulator depend on the requirements of steady-state accuracy and dynamic correction , The design and debugging of dynamic correction of double closed-loop speed regulation system are carried out in the order of inner loop first and then outer loop , In the dynamic process, it can be considered that the outer ring has little effect on the inner ring , The inner ring is an integral part of the outer ring .
3、 ... and 、 Current loop simulation block diagram
We need to use integral module and proportional module to build PI controller , Then add a limiting module at the output end . Set the output limiting of the integration module , Set it to the same limiting amplitude as the limiting module , thus ,PI The controller has the same working characteristics as the actual analog controller .
Four 、 Current loop simulation results
KT=0.25, No overshoot , But the rise time is long

KT=1, Overshoot , Short rise time
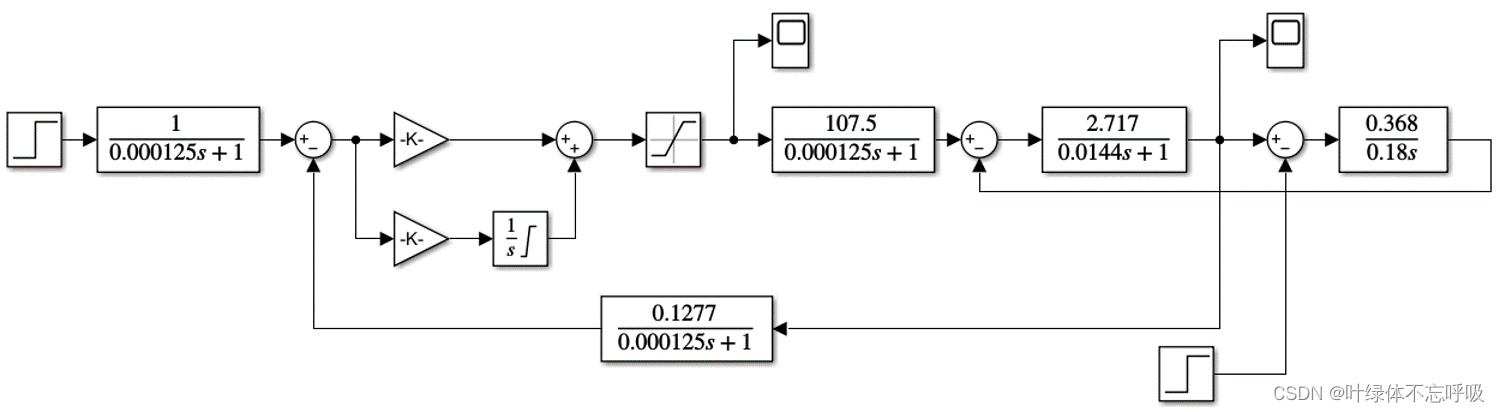
5、 ... and 、 Double closed loop simulation block diagram

The current regulator acts as the regulator of the inner ring , In the process of adjusting the speed of the outer ring , Its function is to make the current follow its given voltage ( That is, the output of the outer ring regulator ) change . The corresponding relationship between speed and current is reflected in the oscilloscope module .
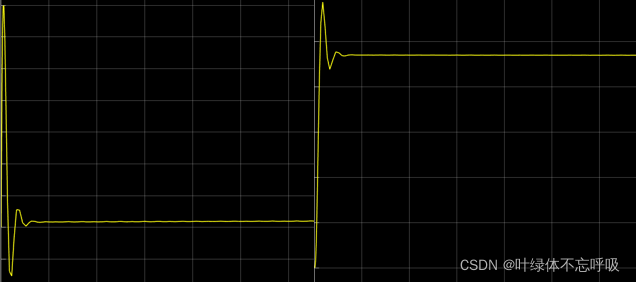
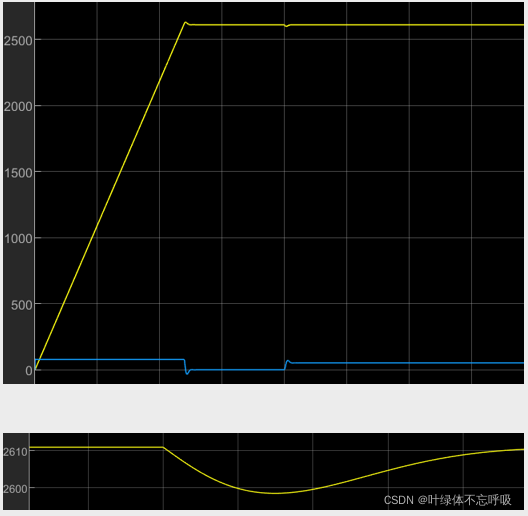
6、 ... and 、 Double closed loop simulation results
ASR The regulator is unsaturated , saturated , Desaturation has three stages , Finally, it operates stably at a given speed . When the DC motor reaches the steady-state speed , The current drops rapidly , Ensure that the output matrix is balanced with the load torque , The motor enters a stable operation state .
Given 10V, No load

Given 10V, Full load

Add load current at the input of load current . After no-load start to stable operation, start at 4s Speed and current response curve when disturbed by rated load . It can be seen that the speed decreases after loading , The current rises and the speed rises again , It is still the given speed in steady state .
7、 ... and 、 Simulation summary
In the dynamic process of DC motor rotor speed , The current regulator can ensure the maximum current allowed by the motor , So as to speed up the dynamic process . When the motor is overloaded or even locked , Limit the maximum armature current , Protection . Once the fault disappears , The system automatically returns to normal immediately .
The correspondence of the outer ring is slower than that of the inner ring , This is the characteristic of designing multi loop control system according to engineering design method , Although it is not conducive to rapidity , But each control loop itself is stable , It is conducive to the composition and debugging of the system .
版权声明
本文为[Chloroplasts don't forget to breathe]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231721295440.html
边栏推荐
- Advantages and disadvantages of several note taking software
- How to change input into text
- Seven cattle upload pictures (foreground JS + background C API get token)
- Router object, route object, declarative navigation, programmed navigation
- ClickHouse-表引擎
- flink 学习(十二)Allowed Lateness和 Side Output
- Shell script -- shell programming specification and variables
- Promise (II)
- Qt error: /usr/bin/ld: cannot find -lGL: No such file or directory
- Use of todesk remote control software
猜你喜欢

For the space occupation of the software, please refer to the installation directory
![[registration] tf54: engineer growth map and excellent R & D organization building](/img/12/7aece45fbc9643c97cdda94b405118.jpg)
[registration] tf54: engineer growth map and excellent R & D organization building

Devexpress GridView add select all columns
Future 用法详解
JS, entries(), keys(), values(), some(), object Assign() traversal array usage
1-4 configuration executable script of nodejs installation
Use of todesk remote control software
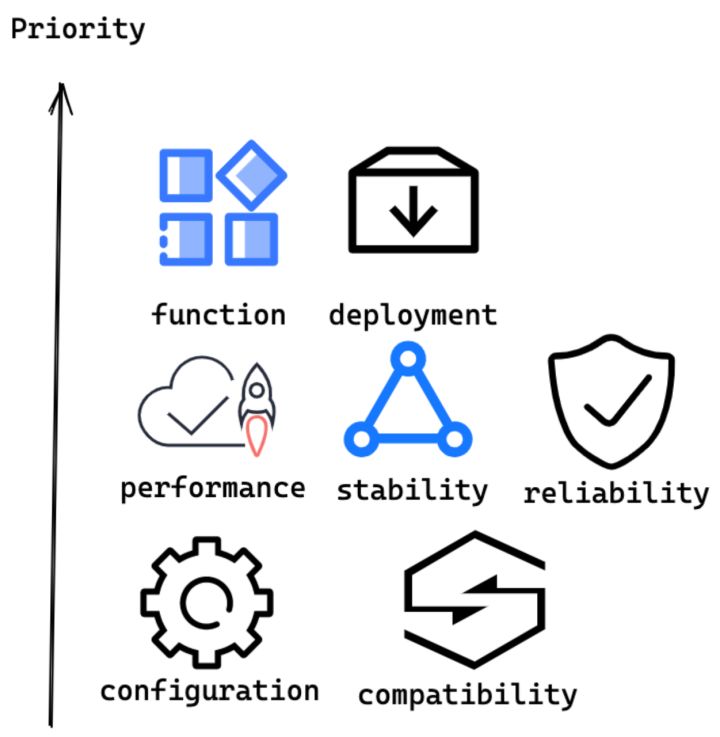
Detailed explanation of Milvus 2.0 quality assurance system

Why do some people say SCM is simple and I have to learn it so hard?
PC uses wireless network card to connect to mobile phone hotspot. Why can't you surf the Internet
随机推荐
El date picker limits the selection range from the current time to two months ago
stm32入门开发板选野火还是正点原子呢?
Solution of Navicat connecting Oracle library is not loaded
Clickhouse - data type
Shell-cut命令的使用
读《Software Engineering at Google》(15)
STM32 entry development board choose wildfire or punctual atom?
常用SQL语句总结
How to manually implement the mechanism of triggering garbage collection in node
Advantages and disadvantages of several note taking software
Understanding of RPC core concepts
Manually implement call, apply and bind functions
双指针进阶--leetcode题目--盛最多水的容器
Promise (III)
Use of shell cut command
Generation of barcode and QR code
ECMAScript history
ClickHouse-SQL 操作
ASP. Net core configuration options (Part 1)
练习:求偶数和、阈值分割和求差( list 对象的两个基础小题)