当前位置:网站首页>Online Safe Trajectory Generation For Quadrotors Using Fast Marching Method and Bernstein Basis Poly
Online Safe Trajectory Generation For Quadrotors Using Fast Marching Method and Bernstein Basis Poly
2022-04-23 07:53:00 【Apple Laboratory of Central South University】
author : 19 the lz
date :2021-11-14
The paper :《Online Safe Trajectory Generation For Quadrotors Using Fast Marching Method and Bernstein Basis Polynomial》
problem :
(a) The first problem is the time allocation of piecewise trajectory , Improper time allocation can easily lead to low-quality trajectories .
(b) The second problem is how to effectively constrain the whole trajectory and its derivatives in free space in hard constrained feasible space .
contribution :
(1) A fast propulsion method based on Euclidean distance field is proposed , Used to search the time indicator path , Provide reasonable time allocation for trajectory optimization .
(2) A trajectory optimization framework , utilize bernstein Base generation smoothing 、 Security 、 Dynamically feasible trajectory .
(3) The proposed motion planning method and system are integrated into a complete four rotor platform for real-time implementation .
One 、 background :
In this paper , We propose a four rotor motion planning method , It can not only generate safe , And it can generate feasible trajectory in the dynamic range .
Two 、 Related work :
3、 ... and 、 Research process and results :
Front end trajectory generation
Fast marching algorithm :
Is a method of simulating wave propagation , By assuming the wavefront to f The velocity of the wave propagates along its normal direction to calculate the time when the wave first reaches a certain point . Suppose the propagation speed f > 0, That is, the wave front only develops outward , And sometimes invariable , And only depends on the location in space .
For path search , We can define a speed map of robot navigation . By simulating the wave spreading from the starting point , Get the arrival time of each point on the map . By tracing the path from the target point to the starting point along the descending direction of the arrival time gradient , Got a path with the shortest arrival time . This is the main idea of applying fast marching algorithm in path search .
Different from other potential field based methods , Fast marching algorithm has no local minimum .

vm Is the maximum speed , d Is the distance from the nearest obstacle
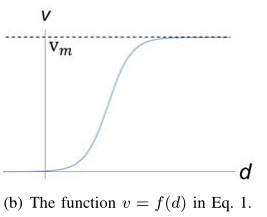

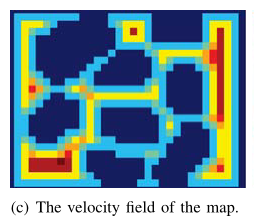

Represents the distribution of velocity in the map , Euclidean symbolic distance field
(d) Indicates... In the map , Time of arrival at each point
heuristic

d*(x): Express x Euclidean distance to the target point
Flight corridor
After obtaining the minimum arrival path of the time index , Extract the free space in the environment , Form a flight corridor optimized at the back end . Make full use of free space , Because finding the solution space and obtaining the optimal solution are equally important for trajectory generation .

First, through the Euclidean symbolic distance field , Get a safe space ball , Initialize the flight corridor as the inscribed cube of the sphere . Then we query the axis alignment direction x,y,z Maximize the free direction of the neighbor mesh to enlarge each cube
analysis : Why initialize an inscribed cube first ?
Maybe to improve the expansion speed , If the scope is too large , There is no need to expand layer by layer
Back end trajectory optimization
Bessel trajectory optimization
Bessel curve

nature :
(1) Pass through the first and last control points
(2) Fixed interval property . Parameters t Belong to [0, 1]
(3) Convex hull property .
(4) Derivative is still Bezier curve .
Loss function

Because it's minimization jerk( Speed up ), therefore k=3

si: The scaling factor , Used for track scaling

constraint

For each Bezier curve , Its higher derivative can be expressed by the linear combination of the corresponding lower order control points

l: Order
i: Which control points
u:x,y,z Axis
j: Number of control points ( rank )
Waypoint constraint
The path point that the four rotor aircraft needs to pass , Because the trajectory must pass through the first and last control points , So through the waypoint constraint , Ensure the connection between each curve
Continuity constraints
Ensure that the connection between each two tracks is continuous
Security constraints

As mentioned above , If it is ensured that the control point is located in the safe flight corridor ( Convex hull property ) in , Then you can ensure that the trajectory is collision free
Motion feasibility constraints

result

and chen Method difference :
(a) The fast travel algorithm in the velocity field is used to provide a natural time index path , Instead of searching paths and allocating time according to some heuristic algorithms .
(b) The Bernstein polynomial basis is directly used to obtain safety and dynamic feasibility , This avoids the risk of collision .
conclusion
This paper presents an online motion planning framework for four rotor autonomous navigation . This method adopts a fast path search method based on travel , Find a path based on time exponential in the velocity field adapting to the environment . Flight corridors are based on path generation and expansion , To make full use of the free space in the environment . Last , We use the method of dynamic optimization based on Bernstein's polynomials to generate safe and feasible trajectories .
版权声明
本文为[Apple Laboratory of Central South University]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230626397771.html
边栏推荐
- Unity get real geographic map application terrain notes
- SAP Query增强开发介绍
- 给定区段范围内字符串自生成代码
- 如何展示您的数字作品集:来自创意招聘人员的建议
- SAP自建表log功能开启
- MySQL8. 0 installation / uninstallation tutorial [window10 version]
- Enterprise wechat login free jump self built application
- KCD_EXCEL_OLE_TO_INT_CONVERT报错SY-subrc = 2
- .NET 5 的新功能 What‘s new in .NET 5
- Dropping Pixels for Adversarial Robustness
猜你喜欢









随机推荐
IT高薪者所具备的人格魅力
Houdini > variable building roads, learning process notes
Gets the maximum getmaxpoint in the list of all points
NodeJS(二)同步读取文件和异步读取文件
Unityshader Foundation
03Scanner类的使用(控制台输入)
三分钟教你用Houdini流体>>解算粒子流体水滴
Window10版MySQL设置远程访问权限后不起效果
根据某一指定的表名、列名及列值来向前或向后N条查相关列值的SQL自定义标量值函数
使用flask时代码无报错自动结束,无法保持连接,访问不了url。
The projection vector of a vector to a plane
MySQL8.0 安装/卸载 教程【Window10版】
Event system (II) multicast events
C# 文本文件的查找及替换(WinForm)
SQL sorts string numbers
Scrapy modifies the time in the statistics at the end of the crawler as the current system time
Houdini>建筑道路可变,学习过程笔记
企业微信免登录跳转自建应用
Unity 获取一个资源被那些资源引用
Houdini terrain and fluid solution (simulated debris flow)