当前位置:网站首页>Blue Bridge Cup provincial road 06 -- the second game of the 12th provincial competition
Blue Bridge Cup provincial road 06 -- the second game of the 12th provincial competition
2022-04-23 16:46:00 【The God of C language】
One , Code section
1,iic.c
/*
Program description : IIC Bus driver
Software environment : Keil uVision 4.10
Hardware environment : CT107 SCM comprehensive training platform 8051,12MHz
Japan period : 2011-8-9
*/
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
// Bus pin definition
sbit SDA = P2^1; /* cable */
sbit SCL = P2^0; /* Clock line */
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
// Bus start condition
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
// Bus stop condition
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Send reply
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0: The reply ,1: Non response
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Waiting for an answer
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
// adopt I2C The bus sends data
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
// from I2C Data is received on the bus
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
2,smgshow.c
#include "reg52.h"
void Delay(int t)
{
while(t--);
}
void HC573(unsigned char channel, unsigned char dat)
{
P0=dat;
switch(channel)
{
case 4:
P2=(P2 & 0x1f) | 0x80;// Strobe Y4C,LED
break;
case 5:
P2=(P2 & 0x1f) | 0xa0;// Strobe Y5C, Buzzer , Relay
break;
case 6:
P2=(P2 & 0x1f) | 0xc0;// Strobe Y6C, Digital tube position selection
break;
case 7:
P2=(P2 & 0x1f) | 0xe0;// Strobe Y7C, Nixie tube segment code
break;
}
P2=(P2 & 0x1f) | 0x00;
}
void Display_SMG(unsigned char pos,unsigned char val)
{
HC573(6,0x01<<pos);
HC573(7,val);
Delay(500);
// HC573(6,0x01<<pos);
HC573(7,0xff);// Blanking
}
void Display_ALL(unsigned char dat)
{
HC573(6,0xff);
HC573(7,dat);
}
3,main.c
#include "reg52.h"
#include "smgshow.h"
#include "iic.h"
sbit S4=P3^3;
sbit S5=P3^2;
sbit S6=P3^1;
sbit S7=P3^0;
unsigned char sta_smg=0;
unsigned char u_sta=0;
unsigned char switch_LED=0;
void Init_Timer()
{
TR1=1;
TR0=1;
TMOD=0x16;
TH0=0xff;
TL0=0xff;
TH1=(0-10000)/256;
TL1=(0-10000)%256;
EA=1;
ET0=1;
ET1=1;
}
unsigned int t;
void Service_T0() interrupt 1
{
t=t+1;
}
unsigned int count=0;
unsigned int count_key=0;
unsigned F_key=0;
unsigned int count_t=0;
unsigned int count_f=0;
unsigned int t_mem=65535;
float f;
void Service_T1() interrupt 3
{
TH1=(0-10000)/256;
TL1=(0-10000)%256;
count+=1;
if(count==100)
{
count=0;
count_t=t;
f=1.0/t;
count_f=f*1000000;
f=0;
t=0;
}
if(F_key==1)
{
count_key+=1;
}
}
float u_guanming=0;
unsigned int u_guanming_smg;
void Read_guanming()
{
unsigned char temp1;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x01);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp1=IIC_RecByte();//0~255
IIC_SendAck(1);
IIC_Stop();
u_guanming=temp1*5/255.0;
u_guanming_smg=u_guanming*100;
}
float u_dianweiqi=0;
unsigned int u_dianweiqi_smg;
float u_mem=99;
void Read_dianweiqi()
{
unsigned char temp2;
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp2=IIC_RecByte();//0~255
IIC_SendAck(1);
IIC_Stop();
u_dianweiqi=temp2*5/255.0;
u_dianweiqi_smg=u_dianweiqi*100;
}
void SMGWork()
{
switch(sta_smg)
{
case 0:
Display_SMG(0,0x8e);
if(count_t>999999)
{
Display_SMG(1,SMGnotdotduanma[count_t/1000000%10]);
}
if(count_t>99999)
{
Display_SMG(2,SMGnotdotduanma[count_t/100000%10]);
}
if(count_t>9999)
{
Display_SMG(3,SMGnotdotduanma[count_t/10000%10]);
}
if(count_t>999)
{
Display_SMG(4,SMGnotdotduanma[count_t/1000%10]);
}
if(count_t>99)
{
Display_SMG(5,SMGnotdotduanma[count_t/100%10]);
}
if(count_t>9)
{
Display_SMG(6,SMGnotdotduanma[count_t/10%10]);
}
Display_SMG(7,SMGnotdotduanma[count_t%10]);
break;
case 1:
Display_SMG(0,0xc8);
if(count_f>999999)
{
Display_SMG(1,SMGnotdotduanma[count_f/1000000]);
}
if(count_f>99999)
{
Display_SMG(2,SMGnotdotduanma[count_f/100000%10]);
}
if(count_f>9999)
{
Display_SMG(3,SMGnotdotduanma[count_f/10000%10]);
}
if(count_f>999)
{
Display_SMG(4,SMGnotdotduanma[count_f/1000%10]);
}
if(count_f>99)
{
Display_SMG(5,SMGnotdotduanma[count_f/100%10]);
}
if(count_f>9)
{
Display_SMG(6,SMGnotdotduanma[count_f/10%10]);
}
Display_SMG(7,SMGnotdotduanma[count_f%10]);
break;
case 2:
Display_SMG(0,0xc1);
Display_SMG(1,~0x40);
if(u_sta==0)
{
Display_SMG(2,SMGnotdotduanma[1]);
Display_SMG(5,SMGdotduanma[u_guanming_smg/100%10]);
Display_SMG(6,SMGnotdotduanma[u_guanming_smg/10%10]);
Display_SMG(7,SMGnotdotduanma[u_guanming_smg%10]);
}
else
{
Display_SMG(2,SMGnotdotduanma[3]);
Display_SMG(5,SMGdotduanma[u_dianweiqi_smg/100%10]);
Display_SMG(6,SMGnotdotduanma[u_dianweiqi_smg/10%10]);
Display_SMG(7,SMGnotdotduanma[u_dianweiqi_smg%10]);
}
break;
}
}
void Scan_key()
{
if(S4==0)
{
Delay(500);
if(S4==0)
{
if(sta_smg==0)
{
sta_smg=1;
}
else if(sta_smg==1)
{
sta_smg=2;
u_sta=0;
}
else
{
sta_smg=0;
}
while(S4==0)
{
SMGWork();
}
}
}
if(S5==0)
{
Delay(500);
if(S5==0)
{
if(sta_smg==2 && u_sta==0)
{
u_sta=1;
}
else if(sta_smg==2 && u_sta==1)
{
u_sta=0;
}
while(S5==0)
{
SMGWork();
}
}
}
if(S6==0)
{
Delay(500);
if(S6==0)
{
Read_dianweiqi();
u_mem=u_dianweiqi;
}
while(S6==0)
{
SMGWork();
}
}
if(S7==0)
{
Delay(500);
if(S7==0)
{
F_key=1;
count_key=0;
while(S7==0)
{
SMGWork();
}
F_key=0;
if(count_key>100)
{
switch_LED =! switch_LED;
}
else
{
t_mem=count_t;
}
}
}
}
unsigned char sta_LED=0xff;
void LED()
{
if(switch_LED==0)
{
if(sta_smg != 2)
Read_dianweiqi();
if(u_dianweiqi>u_mem)
{
sta_LED &= ~0x01;
HC573(4,sta_LED);
}
else
{
sta_LED |= 0x01;
HC573(4,sta_LED);
}
if(count_t>t_mem)
{
sta_LED &= ~0x02;
HC573(4,sta_LED);
}
else
{
sta_LED |= 0x02;
HC573(4,sta_LED);
}
if(sta_smg==0)
{
sta_LED &= ~0x04;
HC573(4,sta_LED);
}
else
{
sta_LED |= 0x04;
HC573(4,sta_LED);
}
if(sta_smg==1)
{
sta_LED &= ~0x08;
HC573(4,sta_LED);
}
else
{
sta_LED |= 0x08;
HC573(4,sta_LED);
}
if(sta_smg==2)
{
sta_LED &= ~0x10;
HC573(4,sta_LED);
}
else
{
sta_LED |= 0x10;
HC573(4,sta_LED);
}
}
else
{
sta_LED=0xff;
HC573(4,sta_LED);
}
}
void Init_system()
{
HC573(4,0xff);
HC573(5,0x00);
Display_ALL(0xff);
}
void main()
{
Init_system();
Init_Timer();
while(1)
{
if(u_sta==0)
{
Read_guanming();
Delay(100);
}
else
{
Read_dianweiqi();
Delay(100);
}
SMGWork();
Scan_key();
LED();
}
}In the second field of the 12th session, except when the real-time voltage of channel 3 is greater than the buffer voltage L1 Light up , Only in voltage acquisition U-3 Interface implementation ( The title is not very clear , Personal understanding is effective in the whole interface ). The reason for this problem is , I read channel one and channel three 2 Two functions are placed in the loop at the same time to read , I find that the values read will be confused , The voltage result of channel 1 shows channel 3 , Reading channel 3 will display channel 1 , If there is a big guy passing by, you can help answer questions . I think I have tied the voltage reading with the display function , Read the voltage of the channel only when the channel is displayed , I have tried many new ways these days , Not ideal , Subsequent optimization .
In this topic, I also learned how to judge the long press and short press of keys , The idea is to press the switch , Logo location 1( Remember to make the count clear 0, For the next count ), To set up while() loop , Judge switch pressed , It is convenient for the timer to start timing , Every time 10ms Counting digits +1, Judge the time of counting digits to determine the content of execution .
Two , summary
Friends who read the previous code , You should find that the referenced header file is less , Because recently, when I write code and find that there are too many modularities, I have to define a lot of variables to receive , Modify these values , Too complicated , Moreover, its own programming level is too low to achieve the corresponding modularization and strong portability .
I finished this problem these days , The most important thing is what you can learn from a topic , Not just one day at a time , Learning new knowledge is the most important thing , Mutual encouragement .
版权声明
本文为[The God of C language]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231640379804.html
边栏推荐
- How much do you know about the process of the interview
- What is homebrew? And use
- Execution plan calculation for different time types
- Query the data from 2013 to 2021, and only query the data from 2020. The solution to this problem is carried out
- Custom implementation of Baidu image recognition (instead of aipocr)
- 关于 background-image 渐变gradient()那些事!
- Getting started with JDBC
- 批量制造测试数据的思路,附源码
- MySQL personal learning summary
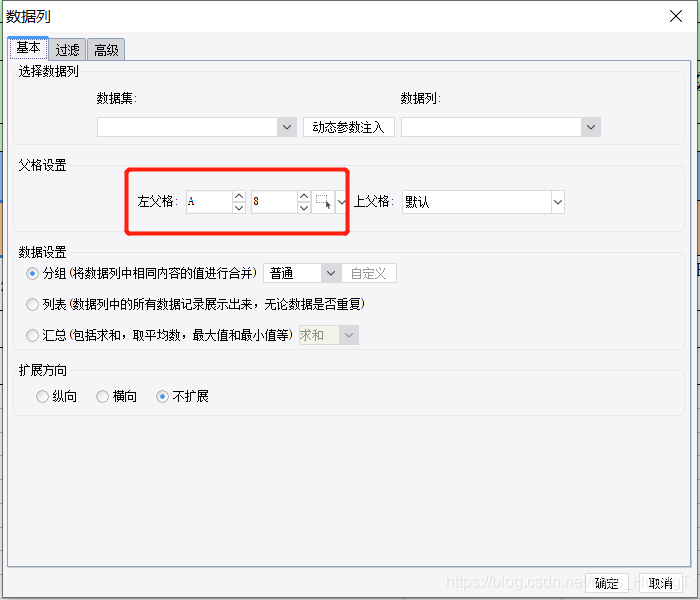
- Sail soft calls the method of dynamic parameter transfer and sets parameters in the title
猜你喜欢
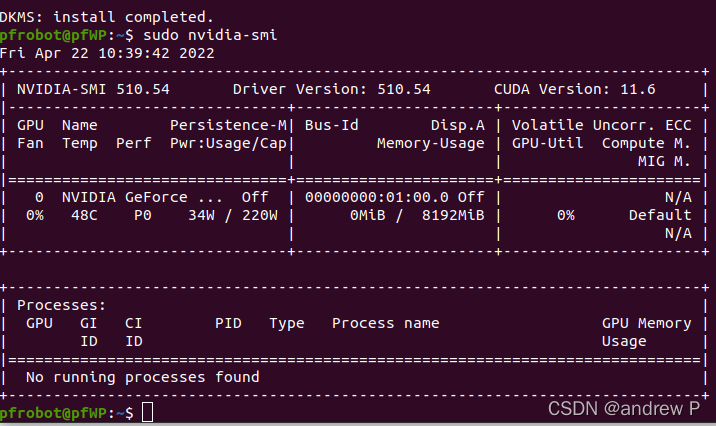
NVIDIA graphics card driver error
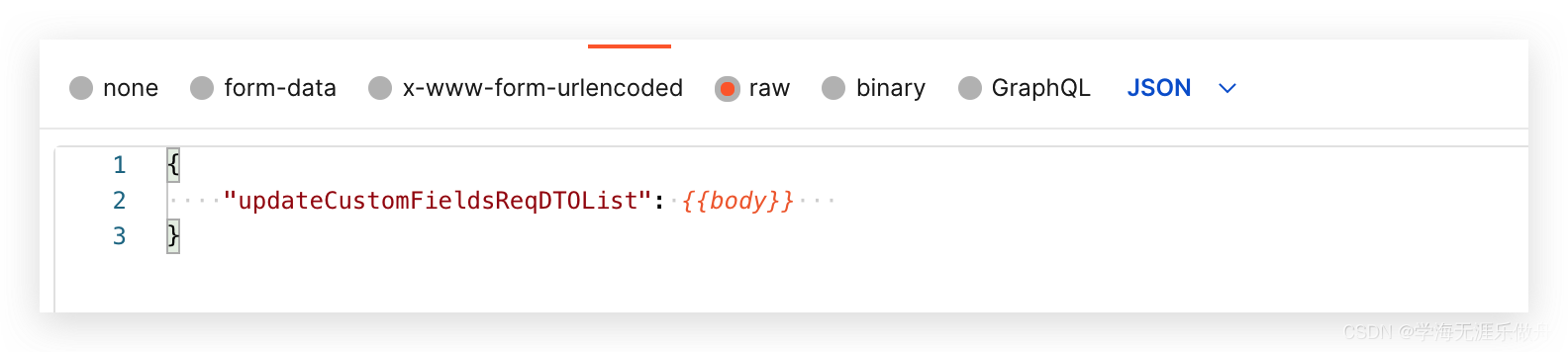
Postman batch production body information (realize batch modification of data)

How to choose the wireless gooseneck anchor microphone and handheld microphone scheme
无线鹅颈麦主播麦手持麦无线麦克风方案应当如何选择
Take according to the actual situation, classify and summarize once every three levels, and see the figure to know the demand
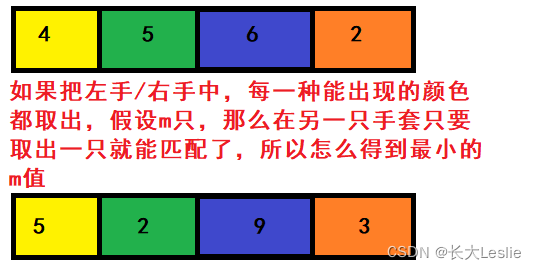
Detailed explanation of Niuke - Gloves

众昂矿业:萤石浮选工艺
Creation of RAID disk array and RAID5
Use case labeling mechanism of robot framework
Gartner 發布新興技術研究:深入洞悉元宇宙
随机推荐
04 Lua operator
Selenium IDE and XPath installation of chrome plug-in
信息摘要、数字签名、数字证书、对称加密与非对称加密详解
MySql主从复制
Sail soft segmentation solution: take only one character (required field) of a string
DanceNN:字节自研千亿级规模文件元数据存储系统概述
深度学习100例 | 第41天-卷积神经网络(CNN):UrbanSound8K音频分类(语音识别)
◰GL-阴影贴图核心步骤
Gartner publie une étude sur les nouvelles technologies: un aperçu du métacosme
File upload and download of robot framework
What is homebrew? And use
扫码登录的原理你真的了解吗?
Real time operation of vim editor
英语 | Day15、16 x 句句真研每日一句(从句断开、修饰)
Detailed explanation of Niuke - Gloves
◰ GL shadow map core steps
Pycham connects to the remote server and realizes remote debugging
UWA Pipeline 功能详解|可视化配置自动测试
Use case labeling mechanism of robot framework
众昂矿业:萤石浮选工艺