当前位置:网站首页>Common processing of point cloud dataset
Common processing of point cloud dataset
2022-04-23 19:15:00 【Incense Dad】
Catalog
Dataset enhancements
Affine transformation
Translation transformation
import numpy as np
import random
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
# Translation parameters
x_offset=random.uniform(-10, 10)
y_offset=random.uniform(-10, 10)
z_offset=random.uniform(-10, 10)
# Transformation matrix
transformation_matrix=np.array([
[1,0,0,x_offset],
[0,1,0,y_offset],
[0,0,1,z_offset],
[0,0,0,1]
])
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
# The supplementary data is homogeneous
ones_data=np.ones(old_xyz.shape[0])
old_xyz=np.insert(old_xyz,3,values=ones_data,axis=1)
# Transform data
new_xyz = np.dot(transformation_matrix,old_xyz.T)
new_array=np.concatenate((new_xyz.T[:,:3],old_array[:,3:]),axis=1)
np.savetxt(new_file,new_array,fmt='%.06f')
Rotation transformation
import numpy as np
import random
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
# Rotation Angle
roate_x=random.uniform(-np.pi/10, np.pi/10)
roate_y=random.uniform(-np.pi/10, np.pi/10)
roate_z=random.uniform(-np.pi/10, np.pi/10)
roate_x_matrix=np.array([
[1,0,0,0],
[0,np.cos(roate_x),-np.sin(roate_x),0],
[0,np.sin(roate_x),np.cos(roate_x),0],
[0,0,0,1]
])
roate_y_matrix=np.array([
[np.cos(roate_y),0,np.sin(roate_y),0],
[0,1,0,0],
[-np.sin(roate_y),0,np.cos(roate_y),0],
[0,0,0,1]
])
roate_z_matrix=np.array([
[np.cos(roate_z),-np.sin(roate_z),0,0],
[np.sin(roate_z),np.cos(roate_z),0,0],
[0,0,1,0],
[0,0,0,1]
])
# Transformation matrix
transformation_matrix=dot(roate_z_matrix).dot(roate_y_matrix).dot(roate_x_matrix)
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
# The supplementary data is homogeneous
ones_data=np.ones(old_xyz.shape[0])
old_xyz=np.insert(old_xyz,3,values=ones_data,axis=1)
# Transform data
new_xyz = np.dot(transformation_matrix,old_xyz.T)
new_array=np.concatenate((new_xyz.T[:,:3],old_array[:,3:]),axis=1)
np.savetxt(new_file,new_array,fmt='%.06f')
Scale transformation
import numpy as np
import random
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
# Scaling parameters
scale=0.1
# Transformation matrix
transformation_matrix=np.array([
[scale,0,0,0],
[0,scale,0,0],
[0,0,scale,0],
[0,0,0,1]
])
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
# The supplementary data is homogeneous
ones_data=np.ones(old_xyz.shape[0])
old_xyz=np.insert(old_xyz,3,values=ones_data,axis=1)
# Transform data
new_xyz = np.dot(transformation_matrix,old_xyz.T)
new_array=np.concatenate((new_xyz.T[:,:3],old_array[:,3:]),axis=1)
np.savetxt(new_file,new_array,fmt='%.06f')
Affine transformation
The synthesis of the above three transformations can be written as :
import numpy as np
import random
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
# Translation parameters
x_offset=random.uniform(-10, 10)
y_offset=random.uniform(-10, 10)
z_offset=random.uniform(-10, 10)
# Scaling parameters
scale=0.1
# Rotation Angle
roate_x=random.uniform(-np.pi/10, np.pi/10)
roate_y=random.uniform(-np.pi/10, np.pi/10)
roate_z=random.uniform(-np.pi/10, np.pi/10)
roate_x_matrix=np.array([
[1,0,0,0],
[0,np.cos(roate_x),-np.sin(roate_x),0],
[0,np.sin(roate_x),np.cos(roate_x),0],
[0,0,0,1]
])
roate_y_matrix=np.array([
[np.cos(roate_y),0,np.sin(roate_y),0],
[0,1,0,0],
[-np.sin(roate_y),0,np.cos(roate_y),0],
[0,0,0,1]
])
roate_z_matrix=np.array([
[np.cos(roate_z),-np.sin(roate_z),0,0],
[np.sin(roate_z),np.cos(roate_z),0,0],
[0,0,1,0],
[0,0,0,1]
])
# Transformation matrix
transformation_matrix=np.array([
[scale,0,0,x_offset],
[0,scale,0,y_offset],
[0,0,scale,z_offset],
[0,0,0,1]
]).dot(roate_z_matrix).dot(roate_y_matrix).dot(roate_x_matrix)
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
# The supplementary data is homogeneous
ones_data=np.ones(old_xyz.shape[0])
old_xyz=np.insert(old_xyz,3,values=ones_data,axis=1)
# Transform data
new_xyz = np.dot(transformation_matrix,old_xyz.T)
new_array=np.concatenate((new_xyz.T[:,:3],old_array[:,3:]),axis=1)
np.savetxt(new_file,new_array,fmt='%.06f')
Affine transformation :
PCL Affine transformation , Realize the translation and rotation of point cloud
Add noise
import numpy as np
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
def add_noise(point, sigma=0.1, clip=0.1):
point = point.reshape(-1,3)
Row, Col = point.shape
noisy_point = np.clip(sigma * np.random.randn(Row, Col), -1*clip, clip)
noisy_point += point
return noisy_point
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
new_xyz=add_noise(old_xyz)
new_array=np.concatenate((new_xyz,old_array[:,3:]),axis=1)
np.savetxt(new_file,new_array,fmt='%.06f')
Down sampling
import numpy as np
# file name
old_file=r"rabbit.txt"
new_file=r"rabbit_change.txt"
# Voxel filtering
def voxel_filter(point_cloud, leaf_size):
filtered_points = []
# Calculate boundary points
x_min, y_min, z_min = np.amin(point_cloud, axis=0) # Calculation x y z The maximum value of the three dimensions
x_max, y_max, z_max = np.amax(point_cloud, axis=0)
# Calculation voxel grid dimension
Dx = (x_max - x_min) // leaf_size + 1
Dy = (y_max - y_min) // leaf_size + 1
Dz = (z_max - z_min) // leaf_size + 1
# Calculate the voxel Indexes
h = list() # h Save indexed list for
for i in range(len(point_cloud)):
hx = (point_cloud[i][0] - x_min) // leaf_size
hy = (point_cloud[i][1] - y_min) // leaf_size
hz = (point_cloud[i][2] - z_min) // leaf_size
h.append(hx + hy * Dx + hz * Dx * Dy)
h = np.array(h)
# Screening point
h_indice = np.argsort(h) # return h The index of the elements sorted from small to large
h_sorted = h[h_indice]
begin = 0
for i in range(len(h_sorted) - 1): # 0~9999
if h_sorted[i] != h_sorted[i + 1]:
point_idx = h_indice[begin: i + 1]
filtered_points.append(np.mean(point_cloud[point_idx], axis=0))
begin = i+1
# Change the point cloud format to array, And return to
filtered_points = np.array(filtered_points, dtype=np.float64)
return filtered_points
# Load the file
old_array=np.loadtxt(old_file)
old_xyz=old_array[:,:3]
# Save the file
new_xyz=voxel_filter(old_xyz, 1)
np.savetxt(new_file,new_xyz,fmt='%.06f')
Data normalization
De centralization
centroid = np.mean(pc, axis=0)
pc = pc - centroid
Scale normalization
m = np.max(np.sqrt(np.sum(pc**2, axis=1)))
pc = pc / m
版权声明
本文为[Incense Dad]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231913486893.html
边栏推荐
- Installation, use and problem summary of binlog2sql tool
- MySQL学习第五弹——事务及其操作特性详解
- I just want to leave a note for myself
- Switching power supply design sharing and power supply design skills diagram
- Introduction to micro build low code zero Foundation (lesson 3)
- JS calculation time difference
- Raspberry pie 18b20 temperature
- openlayers 5.0 加载arcgis server 切片服务
- Zlib realizes streaming decompression
- mysql通过binlog恢复或回滚数据
猜你喜欢

Wechat video extraction and receiving file path
Using Visual Studio code to develop Arduino
![[记录]TypeError: this.getOptions is not a function](/img/c9/0d92891b6beec3d6085bd3da516f00.png)
[记录]TypeError: this.getOptions is not a function
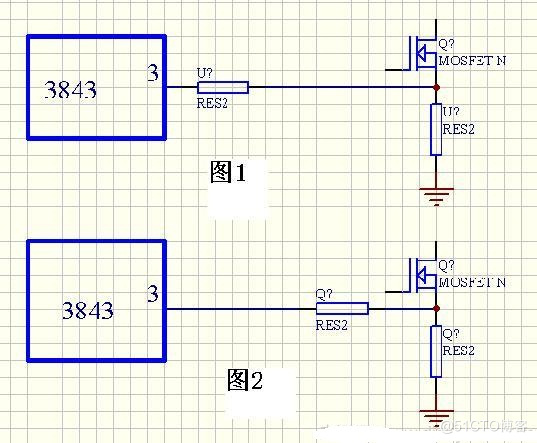
Switching power supply design sharing and power supply design skills diagram
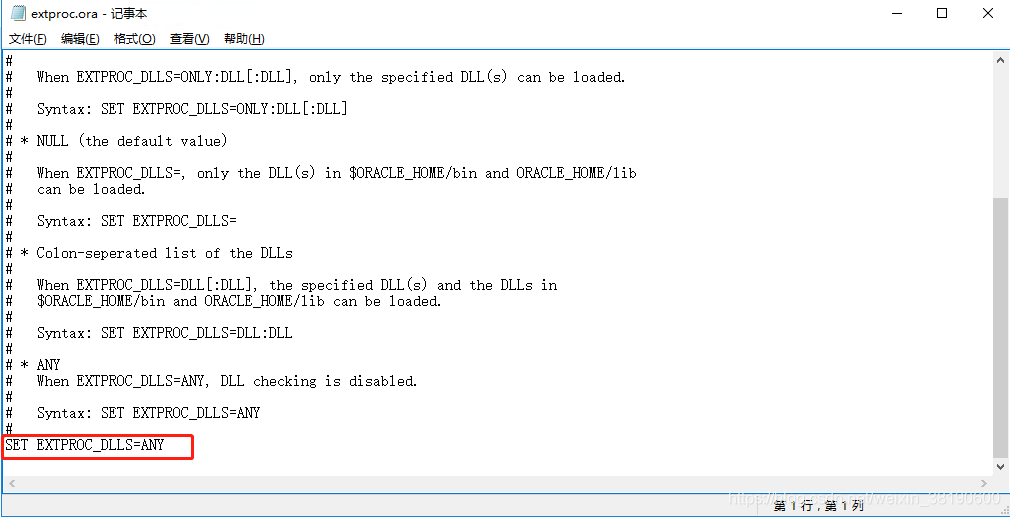
Oracle configuration st_ geometry

Matlab 2019 installation of deep learning toolbox model for googlenet network

简化路径(力扣71)

Introduction to micro build low code zero Foundation (lesson 3)
![[report] Microsoft: application of deep learning methods in speech enhancement](/img/29/2d2addd826359fdb0920e06ebedd29.png)
[report] Microsoft: application of deep learning methods in speech enhancement
【C语言进阶11——字符和字符串函数及其模拟实现(2))】
随机推荐
腾讯云GPU最佳实践-使用jupyter pycharm远程开发训练
Partage de la conception de l'alimentation électrique de commutation et illustration des compétences en conception de l'alimentation électrique
ArcGIS JS API dojoconfig configuration
为何PostgreSQL即将超越SQL Server?
SSDB基础
開關電源設計分享及電源設計技巧圖解
js上传文件时控制文件类型和大小
An idea of rendering pipeline based on FBO
Quick start to static class variables
Transaction processing of SQL Server database
Codeforces Round #784 (Div. 4)
微搭低代码零基础入门课(第三课)
c#:泛型反射
Using Visual Studio code to develop Arduino
Application of DCT transform
Using oes texture + glsurfaceview + JNI to realize player picture processing based on OpenGL es
Tencent cloud GPU best practices - remote development training using jupyter pycharm
简化路径(力扣71)
[today in history] April 23: the first video uploaded on YouTube; Netease cloud music officially launched; The inventor of digital audio player was born
2022.04.23(LC_763_划分字母区间)