当前位置:网站首页>Pytorch: the pit between train mode and eval mode
Pytorch: the pit between train mode and eval mode
2022-04-23 16:37:00 【Xia Xiaoyou】
List of articles
Preface
The blogger was accidentally in the recent development process pytorch in train Patterns and eval It's a pit o(*≧д≦)o!!, Let's not say the cause of the pit , This article will introduce in detail train Patterns and eval The impact of pattern misuse on the model and BatchNorm The mathematical principle of .
1. train Patterns and eval Pattern
Have used pytorch The partners of the deep learning framework must know , Usually we add... Before training the model model.train() This line of code , Or not at all , And before testing the model model.test() This line of code .
Let's take a look at what these two modes do :
def train(self: T, mode: bool = True) -> T:
r"""Sets the module in training mode. This has any effect only on certain modules. See documentations of particular modules for details of their behaviors in training/evaluation mode, if they are affected, e.g. :class:`Dropout`, :class:`BatchNorm`, etc. Args: mode (bool): whether to set training mode (``True``) or evaluation mode (``False``). Default: ``True``. Returns: Module: self """
if not isinstance(mode, bool):
raise ValueError("training mode is expected to be boolean")
self.training = mode
for module in self.children():
module.train(mode)
return self
def eval(self: T) -> T:
r"""Sets the module in evaluation mode. This has any effect only on certain modules. See documentations of particular modules for details of their behaviors in training/evaluation mode, if they are affected, e.g. :class:`Dropout`, :class:`BatchNorm`, etc. This is equivalent with :meth:`self.train(False) <torch.nn.Module.train>`. See :ref:`locally-disable-grad-doc` for a comparison between `.eval()` and several similar mechanisms that may be confused with it. Returns: Module: self """
return self.train(False)
According to the above Official source code , You can get the following information :
eval() take module Set to test mode , It will affect some modules , such as Dropout and BatchNorm, And self.train(False) equivalent
train(mode=True) take module Set to training mode , It will affect some modules , such as Dropout and BatchNorm
Dropout and BatchNorm The reasons for being favored are as follows :
# Dropout
self.dropout = nn.Dropout(p=0.5)
Dropout The layer can then reduce the connections of neurons , It can turn a dense neural network into a sparse neural network , This can alleviate over fitting ( The more neurons are connected in neural networks , The more complex the model , The more easily the model fits )( in fact ,Dropout Layer performance is not so good ).
# BatchNorm2d
self.bn = nn.BatchNorm2d(num_features=128)
BatchNorm Layers can be used to mini-batch Data are normalized to accelerate neural network training , Accelerate the convergence speed and stability of the model , besides , It can also alleviate the gradient explosion problem caused by too many layers of the model .
In training the model , Set the mode of the model to train It's easy to understand , But when we test the model , We need to use all the neurons of the neural network , At this time, it is necessary to prohibit Dropout Layers are working , Otherwise , The accuracy of the model will be reduced . And in test mode BatchNorm The layer will use the training mean and variance , The mean and variance of the input data when the test model is no longer used ( Explain later why ).
OK, With the above brief introduction , Let's do a little experiment , Take a look at train Patterns and eval How much does the pattern affect the results of the model . By default , After building the model, you are in train Pattern :
from torchvision.models import resnet152
if __name__ == '__main__':
model = resnet152()
print(model.training)
# True
If we were testing the model , The model is not set to eval What happens in mode ? I started from ImageNet In the data set 20 Picture to test the model :
Let's first look at the normal results :
import torch
from torchvision.models import resnet152
from torch.nn import functional as F
from torchvision import transforms
from PIL import Image
import pickle
import glob
import pandas as pd
if __name__ == '__main__':
label_info = pd.read_csv('imagenet2012_label.csv')
transform = transforms.Compose([
# transforms.Resize(256),
# transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]
)])
model = resnet152()
ckpt = torch.load('pretrained/resnet152-394f9c45.pth')
model.load_state_dict(ckpt)
model.eval()
# model.train()
file_list = glob.glob('imgs/*.JPEG')
file_list = sorted(file_list)
for file in file_list:
img = Image.open(file)
img = transform(img)
img = img.unsqueeze(dim=0)
output = model(img)
data_softmax = F.softmax(output, dim=1).squeeze(dim=0).detach().numpy()
index = data_softmax.argmax()
results = label_info.loc[index, ['index', 'label', 'zh_label']].array
print('index: {}, label: {}, zh_label: {}'.format(results[0], results[1], results[2]))
The result is absolutely right :
index: 162, label: beagle, zh_label: Dog
index: 101, label: tusker, zh_label: Elephant
index: 484, label: catamaran, zh_label: Sailboat
index: 638, label: maillot, zh_label: Swimsuits
index: 475, label: car_mirror, zh_label: reflector
index: 644, label: matchstick, zh_label: A match
index: 881, label: upright, zh_label: The piano
index: 21, label: kite, zh_label: bird
index: 987, label: corn, zh_label: corn
index: 141, label: redshank, zh_label: bird
index: 335, label: fox_squirrel, zh_label: The squirrel
index: 832, label: stupa, zh_label: palace
index: 834, label: suit, zh_label: Suit
index: 455, label: bottlecap, zh_label: Bottle cap
index: 847, label: tank, zh_label: tanks
index: 248, label: Eskimo_dog, zh_label: Dog
index: 92, label: bee_eater, zh_label: bird
index: 959, label: carbonara, zh_label: pasta
index: 884, label: vault, zh_label: Arcade
index: 0, label: tench, zh_label: fish
Next, set the model to train Pattern , Test again , give the result as follows :
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 463, label: bucket, zh_label: Buckets
index: 600, label: hook, zh_label: hook
index: 463, label: bucket, zh_label: Buckets
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 463, label: bucket, zh_label: Buckets
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
index: 600, label: hook, zh_label: hook
Oh, Ho , What happened? ! This result is very surprising , The model output is completely wrong !
ResNet152 It doesn't contain Dropout layer , There is only one reason for this result , That's it BatchNorm What the hell .
2. BatchNorm
stay pytorch in ,BatchNorm Of Definition as follows :
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True, device=None, dtype=None)
# Parameters:
- num_features: C from an expected input of size (N, C, H, W)
- eps: a value added to the denominator for numerical stability. Default: 1e-5
- momentum: the value used for the running_mean and running_var computation. Can be set to None for cumulative moving average (i.e. simple average). Default: 0.1
- affine: a boolean value that when set to True, this module has learnable affine parameters. Default: True
- track_running_stats: a boolean value that when set to True, this module tracks the running mean and variance, and when set to False, this module does not track such statistics, and initializes statistics buffers running_mean and running_var as None. When these buffers are None, this module always uses batch statistics. in both training and eval modes. Default: True
# Shape:
- Input: (N, C, H, W)
- Output: (N, C, H, W)(same shape as input)
# num_features Indicates the number of input features , If input tensor by (N, C, H, W), be num_features The value of is C
# eps Represents a value added to the denominator , Prevent the occurrence of denominators of 0 The situation of , The default value is 0.00001
# momentum In the calculation running_mean and running_var This parameter will be used when , The default value is 0.1
# affine When set to True when ,BatchNorm There are parameters to learn γ and β, The default value is True
# track_running_stats When set to True when ,BatchNorm Will track the mean and variance of the data ; When set to False when ,BatchNorm Such statistics are not tracked , And will running_mean and running_var The statistics buffer of is initialized to None. When these buffers are None when , stay train Patterns and eval In mode BatchNorm Always use batch Statistics , The default value is True
Build a simple model to see :
import torch
from torch import nn
seed = 10001
torch.manual_seed(seed)
class MyModel(nn.Module):
def __init__(self):
super(MyModel, self).__init__()
self.conv = nn.Conv2d(in_channels=3, out_channels=10, kernel_size=5, stride=1)
self.bn = nn.BatchNorm2d(num_features=10, eps=1e-5, momentum=0.1, affine=True, track_running_stats=True)
self.relu = nn.ReLU()
self.pool = nn.AdaptiveAvgPool2d(output_size=1)
self.linear = nn.Linear(in_features=10, out_features=1)
def forward(self, x):
x = self.conv(x)
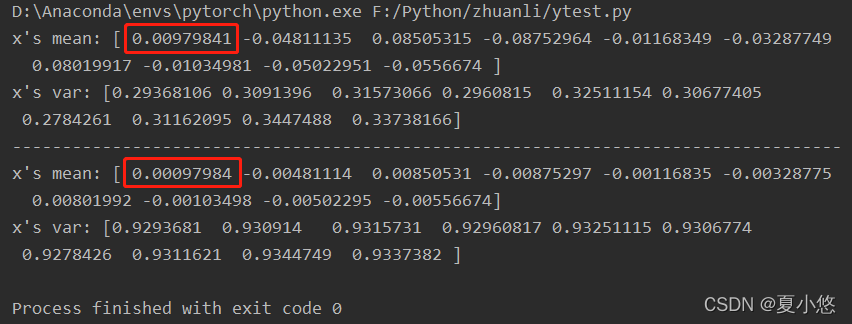
var, mean = torch.var_mean(x, dim=[0, 2, 3])
print("x's mean: {}\nx's var: {}".format(mean.detach().numpy(), var.detach().numpy()))
x = self.bn(x)
print('-----------------------------------------------------------------------------------')
print("x's mean: {}\nx's var: {}".format(self.bn.running_mean.numpy(), self.bn.running_var.numpy()))
x = self.relu(x)
x = self.pool(x)
x = x.view(x.size(0), -1)
output = self.linear(x)
return output
if __name__ == '__main__':
model = MyModel()
inputs = torch.randn(size=(128, 3, 32, 32))
model(inputs)
Run the above model and you will find , We manually calculate the sum of mean and variance of the convoluted features BatchNorm The mean and variance calculated by the layer are not consistent , But you can find some clues , Manually calculated mean and BatchNorm The average value calculated by the layer is different 10 times , The difference is the above parameters momentum Caused by the , The default value is 0.1.
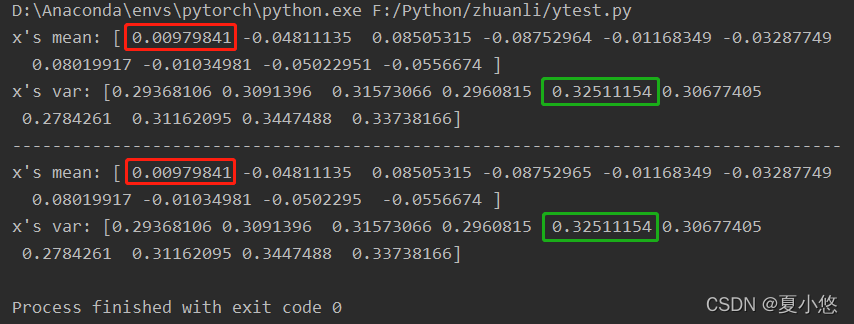
Parameters momentum The value of is changed to 1.0, Run the model again , At this time, the sum of mean and variance of the convoluted features BatchNorm The mean and variance calculated by layer are completely consistent :
Let's look at the parameters affine stay BatchNorm The specific role of , The pictures below are affine=True and affine=False:
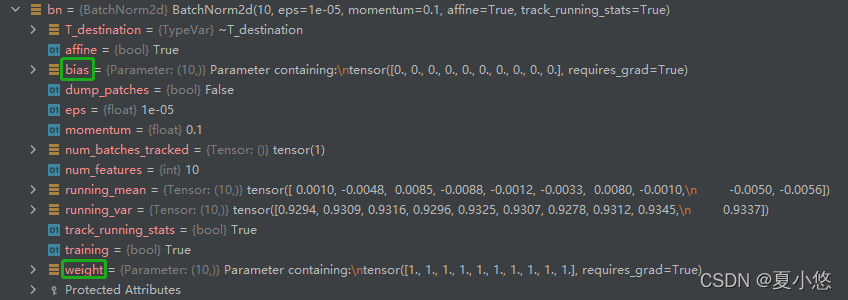
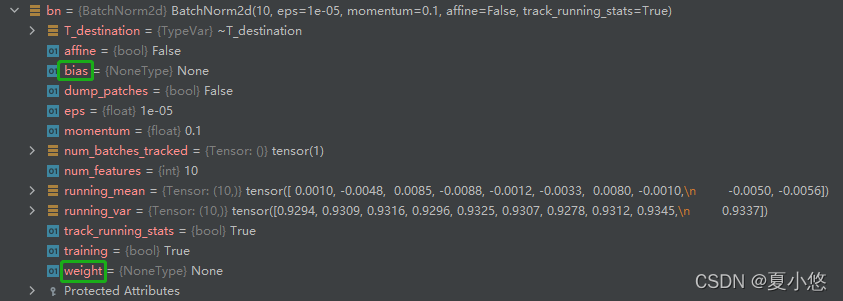
Obviously ,affine=True when BatchNorm The layer has trainable parameters weight and bias.
Last , Let's take another look at a very important parameter :track_running_stats
Look at the picture above num_batches_tracked Value , When we put the parameter track_running_stats Is set to True,BatchNorm The incoming data will be counted , At this time num_batches_tracked The value is 1, That is to record a mini-batch The average of running_mean And variance running_var. Change the code and calculate more times :
if __name__ == '__main__':
model = MyModel()
inputs = torch.randn(size=(128, 3, 32, 32))
for i in range(10):
model(inputs)
print('num_batches_tracked: ', model.bn.num_batches_tracked.numpy())
# num_batches_tracked: 10
In order to be more persuasive , Let's change the code again , Let's compare BatchNorm How are the statistics :
class MyModel(nn.Module):
def __init__(self):
super(MyModel, self).__init__()
self.conv = nn.Conv2d(in_channels=3, out_channels=10, kernel_size=5, stride=1)
self.bn = nn.BatchNorm2d(num_features=10, eps=1e-5, momentum=1.0, affine=True, track_running_stats=True)
self.relu = nn.ReLU()
self.pool = nn.AdaptiveAvgPool2d(output_size=1)
self.linear = nn.Linear(in_features=10, out_features=1)
self.var_data = []
self.mean_data = []
def forward(self, x):
x = self.conv(x)
var, mean = torch.var_mean(x, dim=[0, 2, 3])
self.var_data.append(var)
self.mean_data.append(mean)
x = self.bn(x)
x = self.relu(x)
x = self.pool(x)
x = x.view(x.size(0), -1)
output = self.linear(x)
return output
if __name__ == '__main__':
model = MyModel()
for i in range(10):
inputs = torch.randn(size=(128, 3, 32, 32))
model(inputs)
var = model.var_data[-1]
mean = model.mean_data[-1]
print("x's mean: {}\nx's var: {}".format(mean.detach().numpy(), var.detach().numpy()))
print('-----------------------------------------------------------------------------------')
print("x's mean: {}\nx's var: {}".format(model.bn.running_mean.numpy(), model.bn.running_var.numpy()))
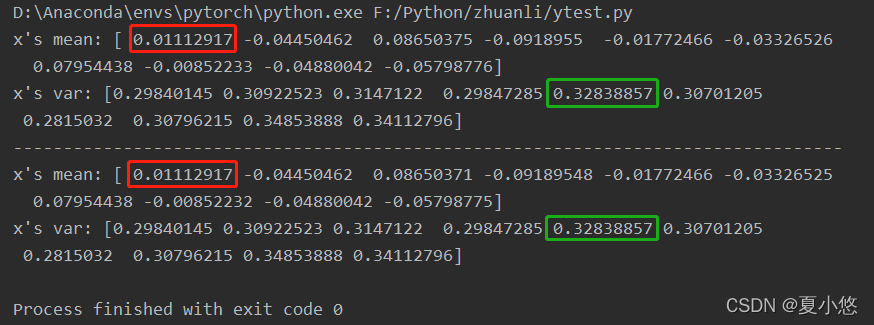
It's not quite what I thought , I think it's the mean and variance of all samples in the past , It's not , According to the actual results ,BatchNorm The recorded mean and variance are always the last mini-batch Mean and variance of samples , That is, only the current data is normalized .
3. Principles of Mathematics
BatchNorm The algorithm comes from Google A paper on :Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift.
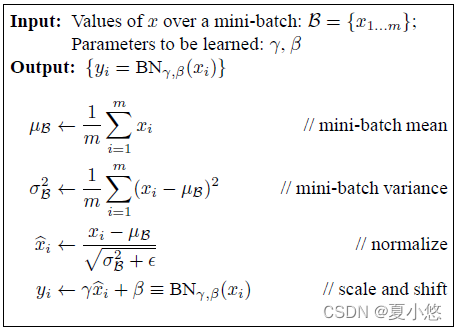
According to the formula in the paper , You can get BatchNorm The expression of the algorithm y = γ ⋅ x − E ( x ) V a r ( x ) + ϵ + β \bm y = \gamma \cdot \frac {\bm x - E(\bm x)} {\sqrt{Var(\bm x) + \epsilon}} + \beta y=γ⋅Var(x)+ϵx−E(x)+β among , x \bm x x Is the value of the input tensor , ϵ \epsilon ϵ Is a smaller floating point number , To prevent the denominator from being 0.
With BatchNorm2d For example , The mean and variance are relative to N、H、W Three directions are calculated and averaged , As follows :
E ( x c ) = 1 N × H × W ∑ N , H , W x c E(\bm x_c)=\frac {1} {N \times H \times W} \sum_{N,H,W} \bm x_c E(xc)=N×H×W1N,H,W∑xc V a r ( x c ) = 1 N × H × W ∑ N , H , W ( x c − E ( x c ) ) 2 Var(\bm x_c)=\frac {1} {N \times H \times W} \sum_{N,H,W} \bigg(\bm x_c-E(\bm x_c)\bigg)^2 Var(xc)=N×H×W1N,H,W∑(xc−E(xc))2 According to the calculation formula, we can know , The output of the statistic is a size of C Vector .
Because the process of calculating statistics includes
mini-batchN The average of , thereforeBatchNormAlso known as batch normalization method , Just change the inputtensorData distribution of , Don't changetensorThe shape of the .
Next, let's follow the formula pytorch Medium BatchNorm2d Parameters of :
Parameters momentum Controlling the calculation of exponential moving average E ( x ) E(\bm x) E(x) and V a r ( x ) Var(\bm x) Var(x) Momentum at , The calculation formula is as follows :
x ^ n e w = ( 1 − α ) x ^ + α x ^ t \hat x_{new} = (1 - \alpha)\hat x + \alpha \hat x_t x^new=(1−α)x^+αx^t among α \alpha α Is the value of momentum , x ^ t \hat x_t x^t It is current. E ( x ) E(\bm x) E(x) or V a r ( x ) Var(\bm x) Var(x) Calculated value , x ^ \hat x x^ Is the estimated value of the exponential moving average in the previous step , x ^ n e w \hat x_{new} x^new Is an estimate of the current exponential moving average .
Parameters affine Determines whether to do affine transformation after normalization , That is, whether to set β \beta β and γ \gamma γ Parameters ,affine=True Express β \beta β and γ \gamma γ Is a trainable scalar parameter ,affine=False Express β \beta β and γ \gamma γ Is a fixed scalar parameter , namely β = 0 \beta=0 β=0, γ = 1 \gamma=1 γ=1.
Parameters track_running_stats Determines whether to use exponential moving average to estimate the current statistical parameters , The default is to use , If you set track_running_stats=False, The calculated value of the current statistic is directly used x ^ t \hat x_t x^t Come on E ( x ) E(\bm x) E(x) and V a r ( x ) Var(\bm x) Var(x) Estimate .
Affine transformation = linear transformation + translation
Conclusion
in application , Usually will mini-batch Set it slightly larger , such as 128, 256, If the setting is too small , It may lead to drastic changes in data , It's hard for the model to converge , After all mini-batch Only a small part of the data in the data set .
版权声明
本文为[Xia Xiaoyou]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231634520407.html
边栏推荐
- Review 2021: how to help customers clear the obstacles in the last mile of going to the cloud?
- 下载并安装MongoDB
- Cloudy data flow? Disaster recovery on cloud? Last value content sharing years ago
- Take according to the actual situation, classify and summarize once every three levels, and see the figure to know the demand
- 力扣-746.使用最小花费爬楼梯
- 漫画:什么是IaaS、PaaS、SaaS?
- Win11 / 10 home edition disables the edge's private browsing function
- Gartner 發布新興技術研究:深入洞悉元宇宙
- linux上启动oracle服务
- Esxi encapsulated network card driver
猜你喜欢

安装及管理程序
Summary according to classification in sail software
第十天 异常机制

众昂矿业:萤石浮选工艺
MySQL master-slave synchronization pit avoidance version tutorial
Hypermotion cloud migration completes Alibaba cloud proprietary cloud product ecological integration certification
Day 10 abnormal mechanism
欣旺达:HEV和BEV超快充拳头产品大规模出货

You need to know about cloud disaster recovery
Creation of RAID disk array and RAID5
随机推荐
Real time operation of vim editor
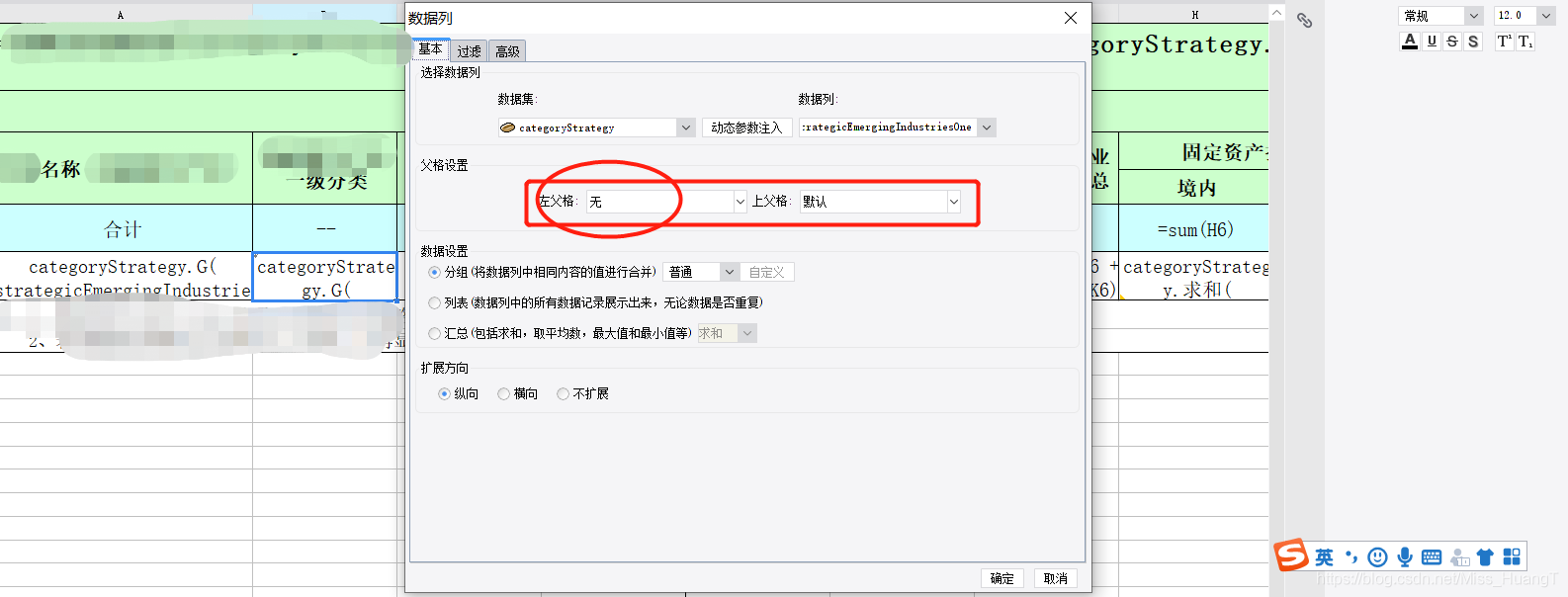
Sail soft calls the method of dynamic parameter transfer and sets parameters in the title
Hyperbdr cloud disaster recovery v3 Release of version 3.0 | upgrade of disaster recovery function and optimization of resource group management function
DanceNN:字节自研千亿级规模文件元数据存储系统概述
The system research problem that has plagued for many years has automatic collection tools, which are open source and free
Loading order of logback configuration file
Execution plan calculation for different time types
How to upgrade openstack across versions
Dlib of face recognition framework
JIRA screenshot
05 Lua control structure
Ali developed three sides, and the interviewer's set of combined punches made me confused on the spot
磁盘管理与文件系统
Gartner predicts that the scale of cloud migration will increase significantly; What are the advantages of cloud migration?
ES常用查询、排序、聚合语句
Introduction notes to PHP zero Foundation (13): array related functions
The most detailed knapsack problem!!!
Sail soft implements a radio button, which can uniformly set the selection status of other radio buttons
Redis "8" implements distributed current limiting and delay queues
Findstr is not an internal or external command workaround