当前位置:网站首页>Robust 3D Object Detection in Cold Weather Conditions
Robust 3D Object Detection in Cold Weather Conditions
2022-08-11 05:23:00 【zhSunw】
Robust 3D Object Detection in Cold Weather Conditions
Method
Point Sampling from 3D Shape Reconstructions
- 对原始点云中的尾气冷凝点云部分使用alpha shapes重建一个三维曲面S
- 从表面S均匀采样N∈[100,1000]个点
- 按最近原则为每个点分配反射强度得到新样本
Point Cloud Augmentation Strategy
- 在生成了大量的尾气冷凝点云样本中按概率放置在干净的点云数据中:
- Pgas概率在目标后中心、右后角或左后角产生
- Ptop概率在目标顶部产生
- Paug总概率控制数据中噪声的变化
- 将每个点转换为球坐标,使用与传感器的参数设置分辨率对点云进行重新采样:解决应用点云增强将会违反数据集传感器的物理特性的问题
Noise Robustness Loss
引入噪声损失:尾气冷凝点云真实框与预测目标框的IoU(减少预测目标框中的噪声——用框内的噪声点个数计算loss:
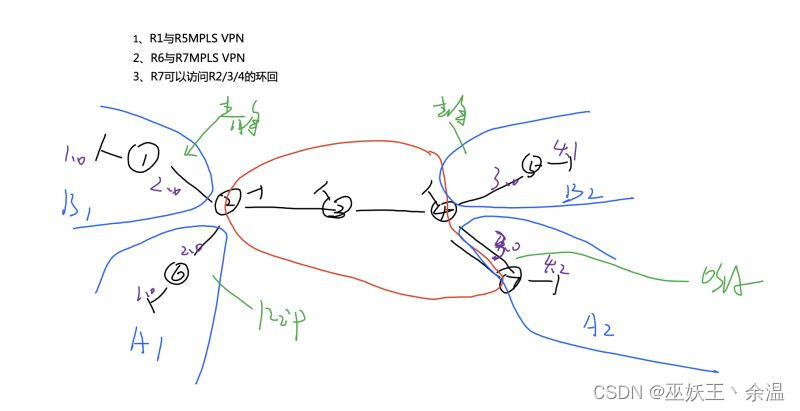
工作原理示意图: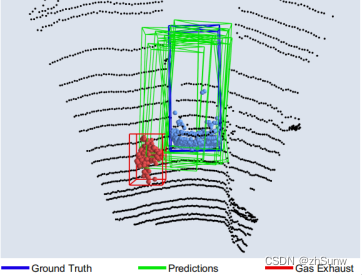
Experiments
DENSE测试集上车辆类别的精度对比:
Aug表示使用数据增强与加入噪声损失之后重新训练的模型。大多数测试数据不包含废气排放,而其他天气影响,会使得模型的增强产生副作用。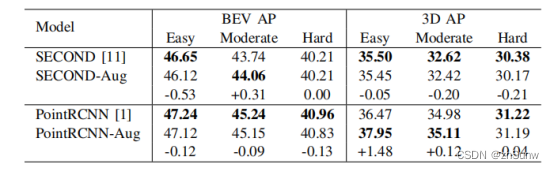
DENSE-GAS测试集上车辆类别的精度对比:
结合噪声鲁棒性损失,迫使网络学习区分车辆和附近的噪声点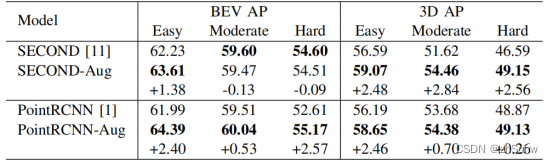
仿照TANet噪声实验在DENSE测试集的精度对比:
Noise表示在目标框内添加的噪声数量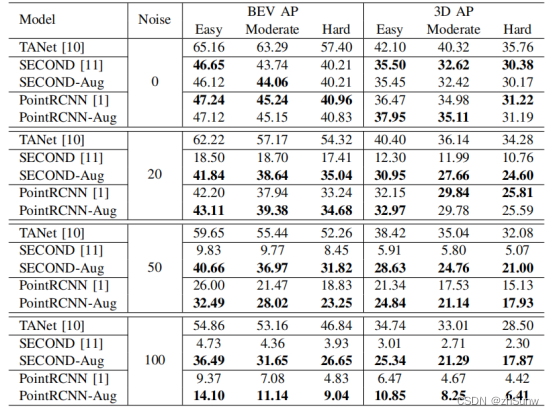
消融实验:
PointRCNN在DENSE-GAS测试集上车辆类别的精度
- 不适用噪声损失,无论是那种数据增强都不利于网络的训练
- 使用提出的生成方法明显好于目标框内添加随机噪声

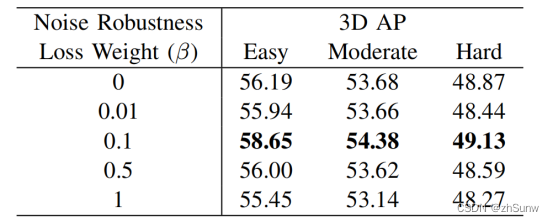
噪声损失权重对模型的影响:
- 过低不利于模型关注到噪声
- 过高容易使模型远离噪声的同时也原理目标位置(只关注噪声)
边栏推荐
猜你喜欢
随机推荐
Fragment 和 CardView
Docker安装Mysql及常用命令
海内外媒体宣发,关键词优化
华为手机软键盘挡住Toast
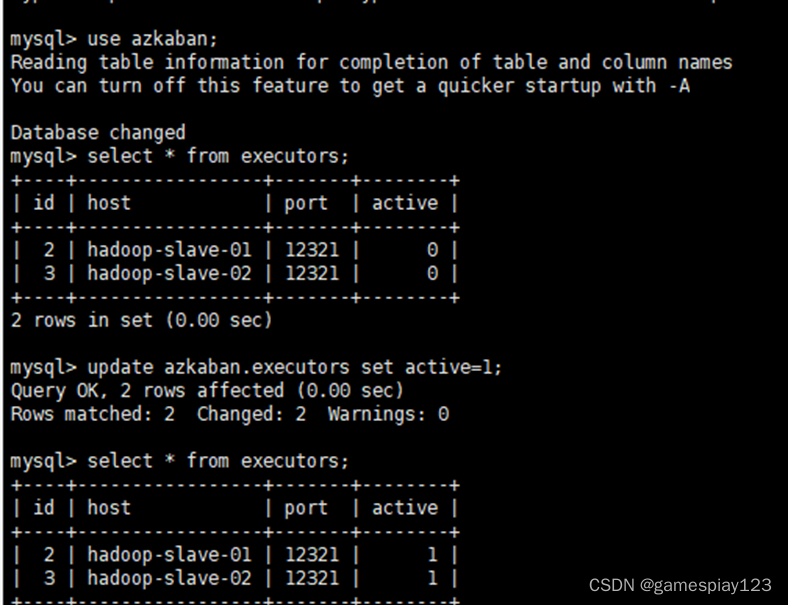
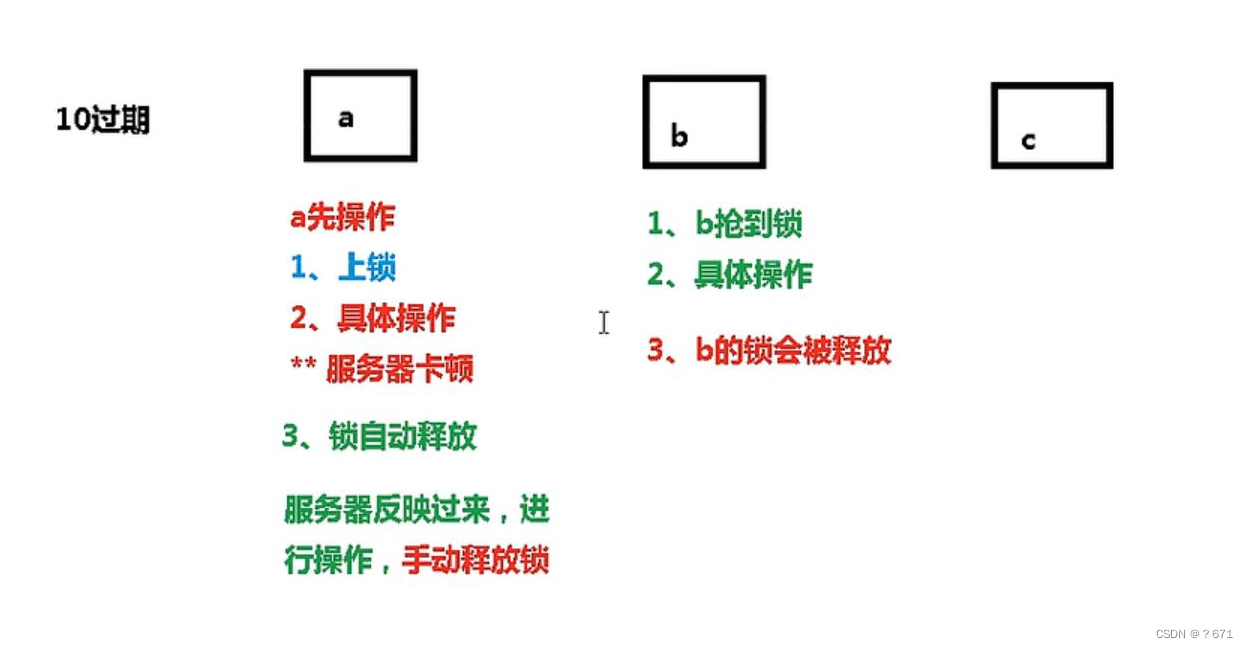
mysql 间隙锁(GAP-LOCK)演示
国内自媒体宣发.多媒体发稿的优势
无字母数字RCE
GBase 8s共享内存中的常驻内存段
xss.haozi靶场通关
OSPF综合实验
代币标准--ERC20协议源码解析
静态综合复习实验
GBASE数据库迁移(Oracle到GBase 8s的数据类型映射)
IDEA本机连接远程TDengine不成功,终于配置成功
Nodered系列—写入tDengine超级表,自动创建子表
BoredApeYachtClub 无聊猿-NFT 源码解析第二节
GBase 8s集中式企业级安全事务型数据库
.Net6 MiNiApi +EFCore6.0高B格操作的WebApi
正则(三剑客和文本处理工具)
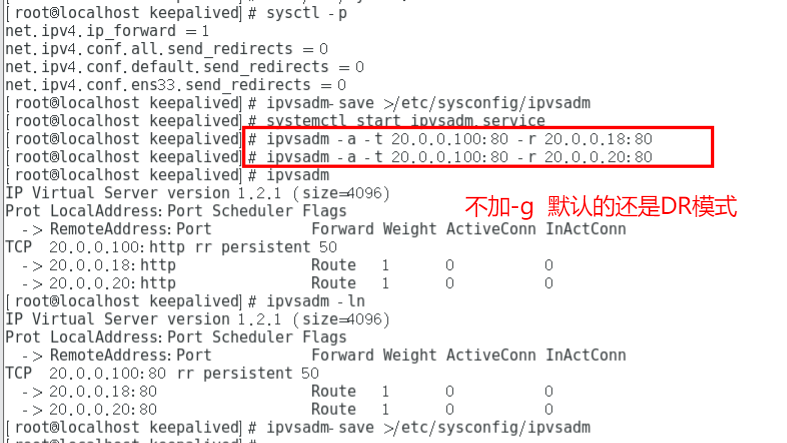
LVS负载群集--DR模式