当前位置:网站首页>AUTOSAR从入门到精通100讲(五十)-AUTOSAR 内存管理系列- ECU 抽象层和 MCAL 层
AUTOSAR从入门到精通100讲(五十)-AUTOSAR 内存管理系列- ECU 抽象层和 MCAL 层
2022-04-23 06:13:00 【格图洛书】
1 MemStack ECU 抽象层和 MCAL 层简介
在本文中,讨论的主题是与 AUTOSAR 中的内存服务 (MemStack) 相关的 ECU 抽象层和 MCAL 层。
用于内存服务的 ECU 抽象层由内存接口 (MemIf)、闪存 EEPROM 仿真(FEE)和 EA(EEPROM 抽象)、外部闪存驱动程序和外部 EEPROM 驱动程序等模块组成。
MCAL 层由内部闪存驱动程序和内部 EEPROM 驱动程序组成。
内存接口(MemIf)负责从下层 Flash 和 EEPROM 模块中进行抽象,并为上层提供统一的地址空间。
2 模拟EEPROM
-
Flash EEPROM Emulation 的概念
EEPROM 和闪存都是非易失性存储器,由一组存储单元组成,每个单元保存一位或多位信息。
可以在字节或字边界上对 EEPROM 进行编程和擦除,这可以在单个单元上完成,而不会干扰其他值。
闪存可以在字或双字边界上编程,也可以使用更大的尺寸,但擦除只能在扇区边界上进行,其中扇区大小主要以Kilobytes为单位。Flash 中的数据以页(必须一次写入的最小字节数)为单位写入,并以扇区(必须一次擦除的最小字节数)为单位进行擦除。
闪存可用于存储数据,这些数据通常使用Flash EEPROM Emulation存储在 EEPROM 中,其中在闪存中实现基于记录的文件系统。
该文件系统中的记录是一组变量,由块的状态(记录+数据)、块的标识符和数据长度组成。
版权声明
本文为[格图洛书]所创,转载请带上原文链接,感谢
https://getuluoshu.blog.csdn.net/article/details/121284617
边栏推荐
- Pymysql connection database
- ArcGIS License Server Administrator 无法启动解决方法
- 5种方法获取Torch网络模型参数量计算量等信息
- Résolution du système
- PyTorch 11.正则化
- Common regular expressions
- Machine learning II: logistic regression classification based on Iris data set
- 第1章 NumPy基础
- 【 planification dynamique】 différentes voies 2
- pth 转 onnx 时出现的 gather、unsqueeze 等算子
猜你喜欢

Mysql database installation and configuration details

【期刊会议系列】IEEE系列模板下载指南
MySQL数据库安装与配置详解
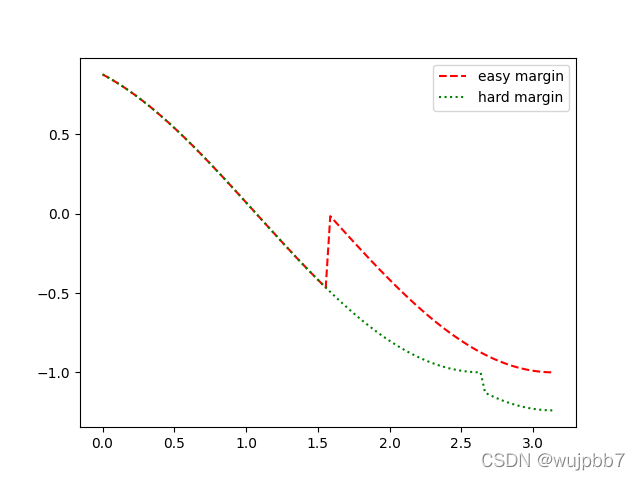
画 ArcFace 中的 margin 曲线

使用 trt 的int8 量化和推断 onnx 模型
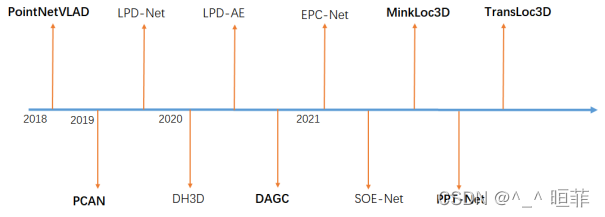
【点云系列】 场景识别类导读
Chapter 2 pytoch foundation 1

Systrace 解析
![[3D shape reconstruction series] implicit functions in feature space for 3D shape reconstruction and completion](/img/4d/6d5821759766a6bf1d77ad51b69e24.png)
[3D shape reconstruction series] implicit functions in feature space for 3D shape reconstruction and completion
![[2021 book recommendation] learn winui 3.0](/img/1c/ca7e05946613e9eb2b8c24d121c2e1.png)
[2021 book recommendation] learn winui 3.0
随机推荐
Gee configuring local development environment
使用 trt 的int8 量化和推断 onnx 模型
ArcGIS license server administrator cannot start the workaround
Gephi tutorial [1] installation
【点云系列】FoldingNet:Point Cloud Auto encoder via Deep Grid Deformation
【点云系列】Neural Opacity Point Cloud(NOPC)
PyTorch 17. GPU并发
Pytorch模型保存与加载(示例)
被 onnx.checker.check_model 检查出的常见错误
PyTorch 9. 优化器
PyMySQL连接数据库
【点云系列】Relationship-based Point Cloud Completion
rearrange 和 einsum 真的优雅吗
【点云系列】Unsupervised Multi-Task Feature Learning on Point Clouds
SSL / TLS application example
【點雲系列】SG-GAN: Adversarial Self-Attention GCN for Point Cloud Topological Parts Generation
Chapter 4 pytoch data processing toolbox
PyTorch 19. PyTorch中相似操作的区别与联系
Handlerthread principle and practical application
[point cloud series] pnp-3d: a plug and play for 3D point clouds