当前位置:网站首页>Robust 3D Object Detection in Cold Weather Conditions
Robust 3D Object Detection in Cold Weather Conditions
2022-08-11 06:16:00 【zhSunw】
Robust 3D Object Detection in Cold Weather Conditions
Method
Point Sampling from 3D Shape Reconstructions
- Use alpha shapes to reconstruct a 3D surface S from the exhaust condensation point cloud in the original point cloud
- Uniformly sample N∈[100,1000] points from surface S
- A new sample is obtained by assigning the reflection intensity to each point according to the nearest principle
Point Cloud Augmentation Strategy
- Probabilistically placed in clean point cloud data in generating a large number of exhaust gas condensation point cloud samples:
- Pgas probability is generated in the rear center, right rear corner or left rear corner of the target
- Ptop probability is generated at the top of the target
- Paug total probability controls the variation of noise in the data
- Convert each point to spherical coordinates, resample the point cloud using the same resolution as the sensor's parameter settings: solves an issue where applying point cloud augmentation would violate the dataset's sensor physics
Noise Robustness Loss
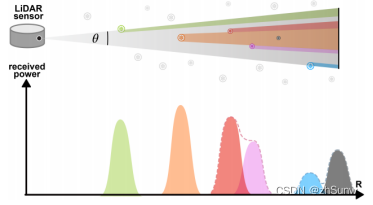
Introduce noise loss: IoU between the real frame of the exhaust gas condensation point cloud and the predicted target frame (reduce the noise in the predicted target frame - calculate the loss with the number of noise points in the frame:
Schematic of how it works: 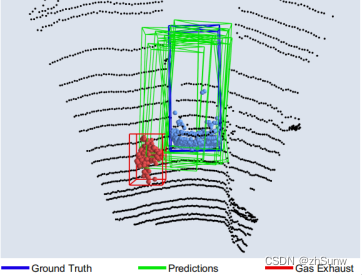
Experiments
Comparison of vehicle classes on the DENSE test set:
Aug represents the model retrained using data augmentation and adding noise loss.Most of the test data does not include exhaust emissions, and other weather effects can side-effect the enhancement of the model.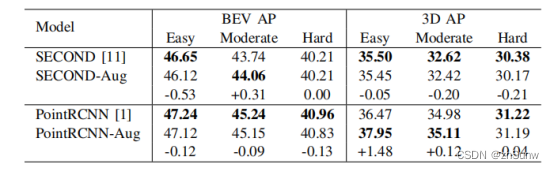
Comparison of vehicle class accuracy on the DENSE-GAS test set:
Combined with a noise robustness loss, forces the network to learn to distinguish between vehicles and nearby noise points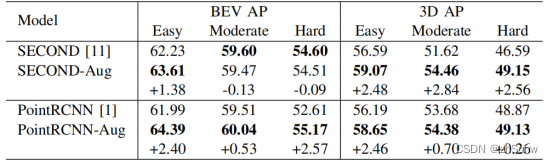
Accuracy comparison on the DENSE test set following the TANet noise experiment:
Noise represents the amount of noise added in the target box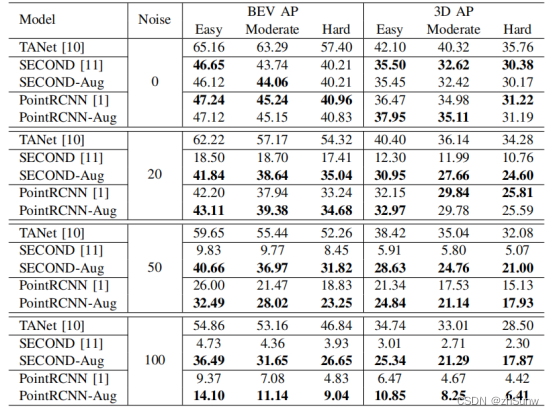
Ablation experiment:
PointRCNN's vehicle class accuracy on DENSE-GAS test set
- No noise loss is applicable, no matter what kind of data augmentation is not conducive to network training
- Using the proposed generation method is significantly better than adding random noise to the target box

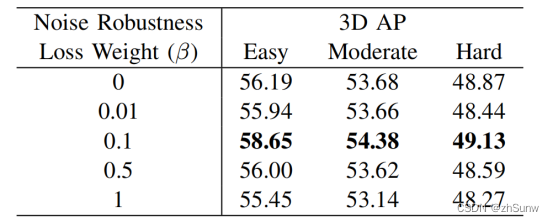
The effect of noise loss weights on the model:
- Too low is not conducive to the model paying attention to noise
- Too high is easy to keep the model away from noise, but also the target position (only focus on noise)
边栏推荐
猜你喜欢

随机推荐
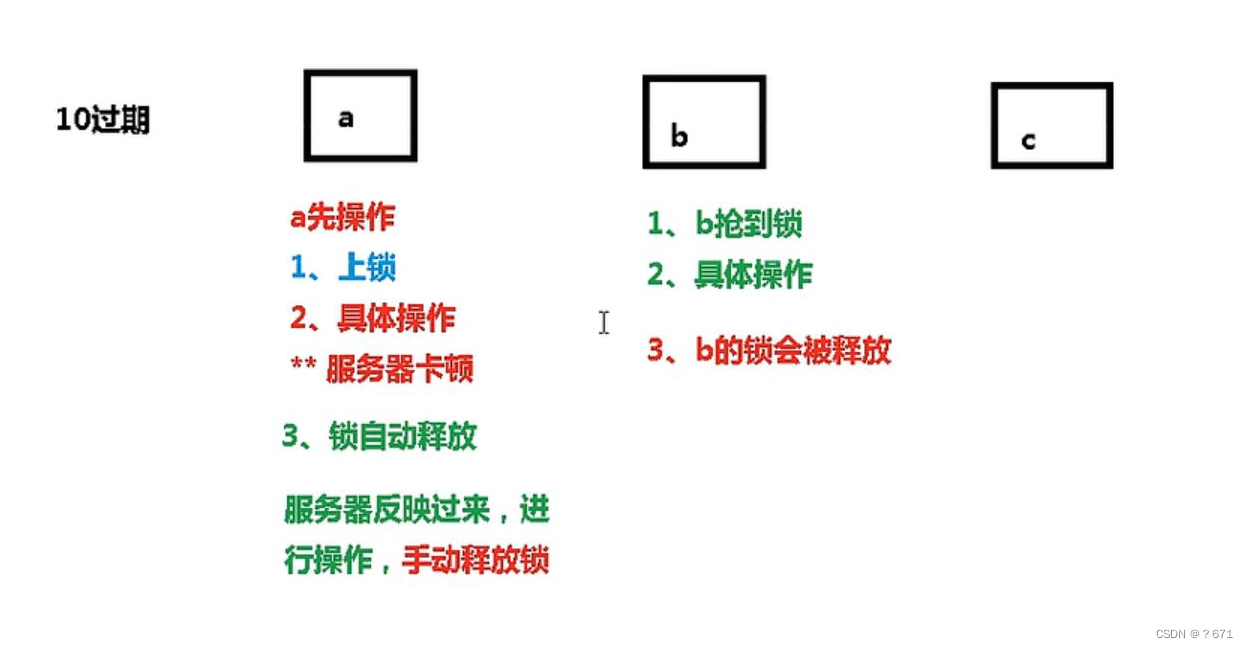
Redis分布式锁
360°大视野安全帽识别系统-深度学习智能视频分析
CVPR2022——Not All Points Are Equal : IA-SSD
基于ijkplayer 0.8.8编译的完整so. libijkffmpeg.so等,支持ssl h265, rm, rmvb
Severe Weather 3D Object Detection Dataset Collection
关于修改挂载到宿主机上的mysql配置文件不生效这件事
Maykle Studio - Second Training in HarmonyOS App Development
MGRE实验
Reconstruction and Synthesis of Lidar Point Clouds of Spray
微信小程序canvas画图,保存页面为海报
GBase 8s 执行计划查询分析
第七届集美大学程序设计竞赛(个人赛)题解
LAGRANGIAN FLUID SIMULATION WITH CONTINUOUS CONVOLUTIONS
Redis持久化方案RDB详解
慢查询语句的优化思路
恶劣天气 3D 目标检测数据集收集
如何修改严格模式让MySQL5.7插入用户表的方式新建用户成功?delete和drop的不同
安全帽识别-施工安全的“监管者”
2022年最新安全帽佩戴识别系统
【docker-compose】mysql安装