当前位置:网站首页>Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
2022-08-11 06:16:00 【zhSunw】
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
Brief introduction~~
Framework PointNet++ as backbone.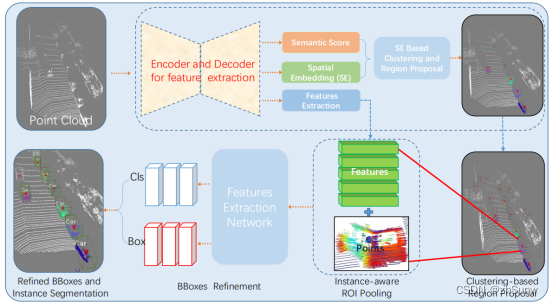
- Backbone segmented the semantic (FG/BG) information for each point after extracting features and predicted the information of BBox (offset, dim, θ).
- Offset and cluster the foreground points, assign an ID to each category of points as an instance, and obtain a BBox by averaging the information of the first 5 predictions for each instance.
- Instance-aware RoI polling: Foreground points that are not in BBox but have corresponding IDs are also used for Refinement; foreground points that are in BBox but do not have corresponding IDs are deleted.(That is, each object proposal in Refinement considers the point of the instance instead of the point in the Box.)
边栏推荐
猜你喜欢
Maykle Studio - Second Training in HarmonyOS App Development
梅科尔工作室-华为云ModelArts第一次培训

基于AI智能图像识别:4个不同的行业应用
梅科尔工作室-深度学习第二讲 BP神经网络
NAT模式 LVS负载均衡群集部署
NodeRed系列—创建mqtt broker(mqtt服务器),并使用mqttx进行消息发送验证
Nodered系列—使用node-red-node-mysql写入mysql详细步骤
若依分离版—增加通知公告预览功能

2022年最新安全帽佩戴识别系统
.Net6 MiNiApi +EFCore6.0高B格操作的WebApi
随机推荐
The working principle and industry application of AI intelligent image recognition
RecycleView
CVPR2022——A VERSATILE MULTI-VIEW FRAMEWORK
GBASE数据库迁移(Oracle到GBase 8s的数据类型映射)
基于AI智能图像识别:4个不同的行业应用
静态综合复习实验
Pay “Attention” to Adverse Weather
CVPR2022——Not All Points Are Equal : IA-SSD
【高德地图】易采坑合集
华为adb wifi调试断线问题解决
梅科尔工作室-第四次PR培训笔记(字幕和标题动画,关键帧动画和声音处理)
Toward a Unified Model
架构设计杂谈
基于ijkplayer 0.8.8编译的完整so. libijkffmpeg.so等,支持ssl h265, rm, rmvb
C语言字节对齐,看这篇就够了
内核与用户空间通过字符设备通信
docker搭建redis主从和哨兵模式集群
>>开发工具:IDEA格式化代码无效
Fragment 和 CardView
SCNet:Semantic Consistency Networks for 3D Object Detection