当前位置:网站首页>CNN-based Point Cloud De-Noising
CNN-based Point Cloud De-Noising
2022-08-11 06:17:00 【zhSunw】
CNN-based Lidar Point Cloud De-Noising in Adverse Weather

Key Knowledgeable:
- Autolabeling for Noise Caused by Rain or Fog
Judging the distance change of each pixel according to the range image to determine whether the pixel is noise caused by rain, fog and water droplets. Label the data:
Why the noise can be marked like this:
The author's understanding is that the rain and fog noise is often the reflection produced by the water droplets in the air, which is described in detail in the article "Fog Simulation on Real LiDAR Point Clouds".When the camera distance is at a certain value, the reflection intensity reaches its peak value. Therefore, there are often circular noise reflections next to the camera in rainy and foggy days. Therefore, when the scanning vehicle is moving, the distance from the non-noise point to the camera will change.There are dense water droplets in the middle, and there are always water droplets with the camera as the center of the circle reflecting noise, so the distance of the noise will not change much, so it can be preliminarily judged whether it is noise by judging whether the point has moved a threshold in each frame.
Of course, this is my personal opinion. The text does not describe this part too much. Corrections are welcome
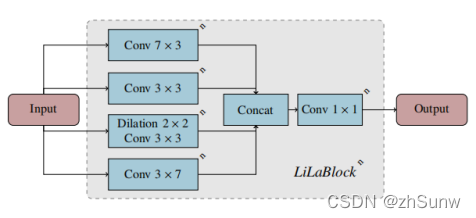
- Network Architecture
Annotated, augmented data for denoising with WeatherNet for semantic segmentation:
- Data Augmentation
Simulation rain and fog weather augmentation training set data: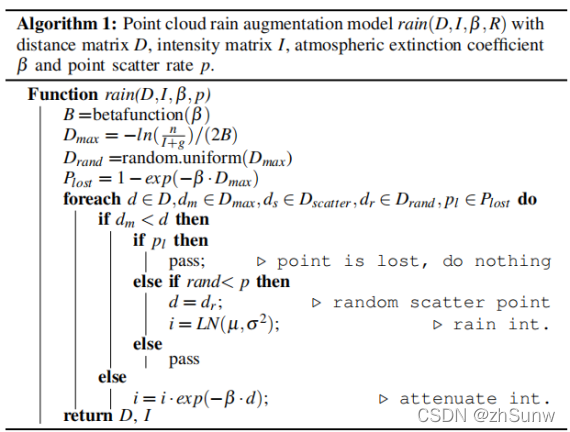
- Experiments
Quantitative denoising results for each weather: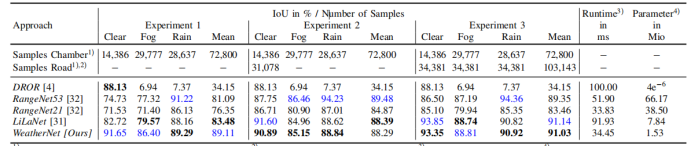
Experiment1, 2, 3 represent three training sets respectivelyThe experimental results below:
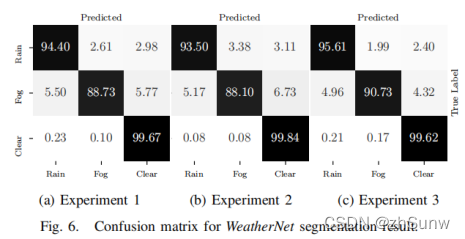
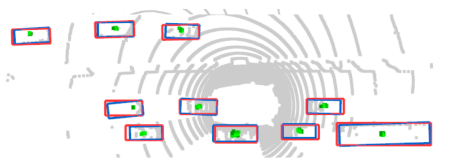
Visualize qualitative results: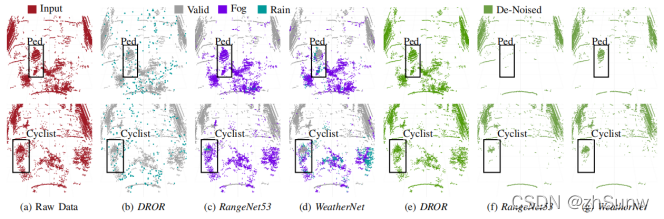
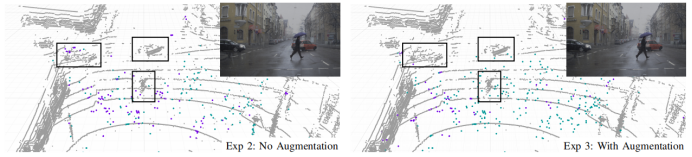
You can see that data enhancement and WeatherNet are denoising (semantic segmentation of rain and fog) work
边栏推荐
- 通过字符设备虚拟文件系统实现kernel和userspace数据交换(基于kernel 5.8测试通过)
- CNN-based Point Cloud De-Noising
- The selection points you need to know about the helmet identification system
- 关于安全帽识别系统,你需要知道的选择要点
- Nodered系列—使用node-red-node-mysql写入mysql详细步骤
- 跳转到微信小程序方法
- 微信小程序canvas画图,保存页面为海报
- 解决Glide图片缓存问题,同一url换图片不起作用问题
- >>技术应用:*aaS服务定义
- @2022-02-22:每日一语
猜你喜欢




随机推荐
emqx创建规则引擎写入tDengine
emqx安装及mqttx连接使用
【高德地图】易采坑合集
RecycleView
mAPH——Waymo数据集
浙江大学软件学院2020年保研上机真题练习
梅科尔工作室-Pr第一次培训笔记(安装及项目创建)
OpenPCDet installs the latest version: spconv in one step
>>技术应用:*aaS服务定义
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第五次培训
The working principle and industry application of AI intelligent image recognition
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
秦始皇到底叫嬴政还是赵政?
四大组件之一BroadCast(其一)
Reconstruction and Synthesis of Lidar Point Clouds of Spray
CVPR2020:Seeing Through Fog Without Seeing Fog
>>数据管理:读书笔记|第一章 数据管理
Use regex to verify whether the file name is legal
Realize data exchange between kernel and userspace through character device virtual file system (passed based on kernel 5.8 test)
CNN-based Point Cloud De-Noising