当前位置:网站首页>ARM 汇编指令 ADR 与 LDR 使用
ARM 汇编指令 ADR 与 LDR 使用
2022-08-11 05:25:00 【Emily_rong_2021】
简介
这两个都是伪指令:ADR 是小范围的地址读取伪指令,LDR 是大范围的读取地址伪指令。可实际使用的区别是: ADR 是将基于 PC 相对偏移的地址值或基于寄存器相对地址值读取的伪指令,而 LDR 用于加载 32 位立即数或一个地址到指定的寄存器中。
adr r0, _start 得到的是_start的当前执行位置,由 pc+offset 决定的 得到有效地址
ldr r0, =_start 得到的是绝对的地址,链接时决定;
------------------------------------------------------------------------
/* 重定位Boot代码到RAM内存,将Boot代码从FLASH移到RAM中 */
relocate: /* relocate U-Boot to RAM */
adr r0, _start /* r0 <- current position of code */
/**************************************************************************
* 把_start的相对地址移到r0, 相对寻址以程序计数器PC 的当前值为基地址,
* 指令中的地址标号作为偏移量,将两者相加之后得到操作数的有效地址。
* 它是与位置无关的,主要看Boot在哪里运行,也就是PC指针在哪里 (假设_start偏移量为0),
* 例如这段代码在 0x02000000 (FLASH起始地址)运行,即此时PC=0x02000000,那么 adr r0, _start 得到 r0 = 0x02000000;
* 如果在地址 0x81008000(Boot在RAM中加载地址)运行,即此时PC=0x81008000,那么r0就是 0x81008000 了。
*
* 此处要注意ldr与adr的区别,看下面的代码片段:
* ldr r0, _start
* adr r0, _start
* ldr r0, =_start
* nop
* mov pc, lr
* _start:
* nop
* 下面是反汇编的结果:
* 0c008000 <_start-0x14>:
* c008000: e59f000c ldr r0, [pc, #12] ; c008014 <_start>
* c008004: e28f0008 add r0, pc, #8 ; 0x8
* c008008: e59f0008 ldr r0, [pc, #8] ; c008018 <_start+0x4>
* c00800c: e1a00000 nop (mov r0,r0)
* c008010: e1a0f00e mov pc, lr
*
* 0c008014 <_start>:
* c008014: e1a00000 nop (mov r0,r0)
*
* 分析:
* ldr r0, _start
* 从内存地址 _start 的地方把值读入。执行这个后,r0 = 0xe1a00000
*
* adr r0, _start
* 取得 _start 的地址到 r0,但是请看反编译的结果,它是与位置无关的。其实取得的是相对的位置。例如这段代码在 0x0c008000 运行,
* 那么 adr r0, _start 得到 r0 = 0x0c008014;如果在地址 0 运行,就是 0x00000014 了。即当前PC值加上_start的偏移量。
*
* ldr r0, =_start
* 这个取得标号 _start 的绝对地址。这个绝对地址是在 link 的时候确定的。看上去这只是一个指令,但是它要占用 2 个 32bit 的空间,
* 一条是指令,另一条是 _start 的数据(因为在编译的时候不能确定 _start 的值,所以不能直接用 mov 指令来给 r0 赋一个 32bit 的常量,
* 所以需要多出一个空间存放 _start 的真正数据,这个数据是在 link 的时候确定的,在这里就是 0x0c008014)。
* 因此可以看出,这个是绝对的寻址,不管这段代码在什么地方运行,它的结果都是 r0 = 0x0c008014
(5条消息) adr指令_读研功夫-CSDN博客_adr指令 https://blog.csdn.net/u010886535/article/details/52800184
https://blog.csdn.net/u010886535/article/details/52800184
边栏推荐
- Maykel Studio - Django Web Application Framework + MySQL Database Second Training
- 梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第五次培训
- Hardhat Recognition System - Solving Regulatory Conundrums
- STM32学习笔记(白话文理解版)—搞懂PWM输出
- 安全帽识别系统
- 红外线应用-红外遥控
- Safety helmet recognition - construction safety "regulator"
- CMT2380F32模块开发10-高级定时器例程
- 梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第四次培训
- 网络七层结构(讲人话)
猜你喜欢
Waymo dataset usage introduction (waymo-open-dataset)
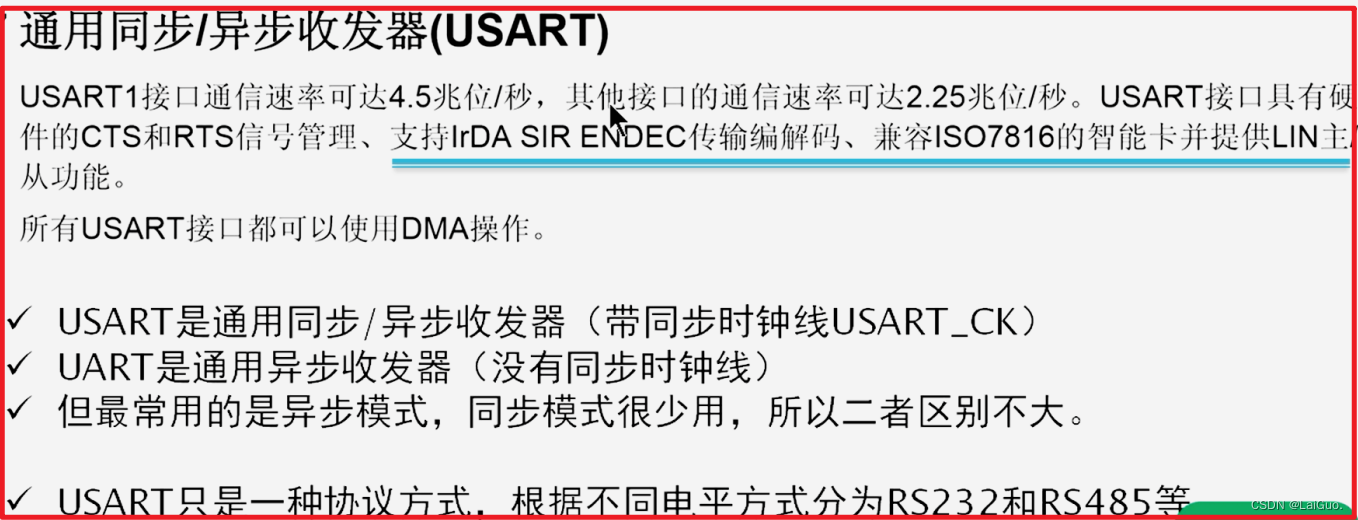
STM32学习笔记(白话文理解版)—USART通信接口
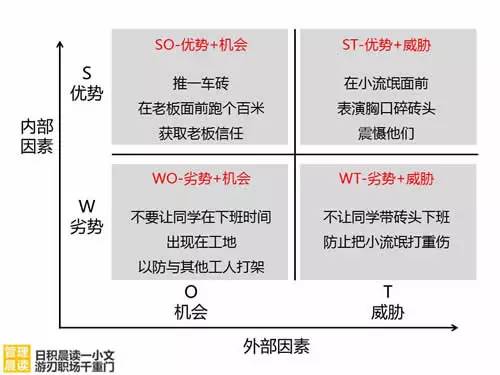
SWOT分析法

关于接口响应内容的解码

pip安装报错:is not a supported wheel on this platform

Maykle Studio - HarmonyOS Application Development First Training

360° large field of view helmet recognition system-deep learning intelligent video analysis
Use regex to verify whether the file name is legal
CVPR2020: Seeing Through Fog Without Seeing Fog
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第四次培训
随机推荐
Hard hat identification
Safety helmet recognition - construction safety "regulator"
360° large field of view helmet recognition system-deep learning intelligent video analysis
智慧工地 安全帽识别系统
安全帽识别系统
STM32学习总结(一)——时钟RCC
Error: Flash Download failed - “Cortex-M4“-STM32F4
目标检测——卷积神经网路基础知识
CMT2380F32模块开发0-总览
MSP430学习总结——时钟UCS
mAPH - Waymo dataset
Maykel Studio - Django Web Application Framework + MySQL Database Second Training
梅科尔工作室-HarmonyOS应用开发第一次培训
Maykle Studio - Second Training in HarmonyOS App Development
支付牌照是什么意思
华为云IOT平台设备获取api调用笔记
Zhejiang University School of Software 2020 Guarantee Research Computer Real Question Practice
张小龙的微信公开课(2019年)
从概念认识AI
CMT2380F32模块开发1-硬件