当前位置:网站首页>CMT2380F32模块开发8-Base Timer例程
CMT2380F32模块开发8-Base Timer例程
2022-08-11 05:24:00 【andylauren】
Base Timer 包含三个定时器 Timer0/1/2。Timer0/1/2 功能完全相同。Timer0/1/2 是同步定时/计数器,可以作为 16 位自动重装载功能的定时/计数器,也可以作为 32 位无重载功能的定时/计数器。Timer0/1/2 可以对外部脉冲进行计数或者实现系统定时。
Timer0/1/2 每个定时/计数器都有独立的控制启动信号,以及外部输入时钟,门控信号。
TIM0/1/2 的定时/计数器支持两种工作模式,模式 1为 32 位自由计数模式。模式 2 是 16 位重载模式。
通过定时器的翻转输出功能可以实现驱动 Buzzer 的功能。还给出了在计数时钟为 4M 情况下 Buzzer 输出不同频率的Timer 重载模式配置值。
bt_cnt例程
本样例Base Timer对内部4M时钟进行计数,直到计数到溢出值时产生中断,并停止计数,LED1点亮,大约上电4.2s左右。
使用内部4MHz,定时器进行256分频,周期为15625Hz,定时器初始值0xFFFF0000,需要16位溢出,计数值65536。
溢出时间为65536/15625=4.19s
en_result_t BtCntTest(void)
{
stc_bt_config_t stcConfig;
en_result_t enResult = Error;
uint32_t u32InitCntData = 0xFFFFFFFA; // 设置初始值,实际使用16位
// INT ENABLE
EnableNvic(TIM0_IRQn, 3, TRUE);
Bt_EnableIrq(TIM0);
//对外部ext0计数,GPIO配置
Gpio_SetFunc_TIM0_EXT_P34();
stcConfig.enGateP = BtPositive;
stcConfig.enGate = BtGateDisable;
stcConfig.enPRS = BtPCLKDiv256;
stcConfig.enTog = BtTogDisable;
stcConfig.enCT = BtCounter;
stcConfig.enMD = BtMode1;
stcConfig.pfnTim0Cb = Bt0Int;
// Bt配置初始化
if (Ok != Bt_Init(TIM0, &stcConfig)) {
enResult = Error;
}
//设置计数值,启动计数
Bt_Cnt32Set(TIM0, u32InitCntData);
Bt_Run(TIM0);
Gpio_InitIO(1, 5, GpioDirOut);
Gpio_SetIO(1, 5, 0);
//等待计数完成后进入中断……
while (1) {
if (0x01 == u32BtTestFlag) {
//进入中断后,停止计数
u32BtTestFlag = (u32BtTestFlag & (~0x01));
Bt_Stop(TIM0);
enResult = Ok;
break;
}
}
Gpio_SetIO(1, 5, 1);
return enResult;
}设置tim0计数器,在开始计数时点亮LED3,当计数到时熄灭LED3.
void Bt0Int(void)
{
if (TRUE == Bt_GetIntFlag(TIM0)) {
Bt_ClearIntFlag(TIM0);
u32BtTestFlag = 0x01;
}
}在中断中置位,主程序此时会退出while循环向下执行,熄灭LED3。
bt_timer例程
本样例使用门控控制定时器定时,定时溢出后产生中断,翻转LED1,并重新载入初值进行定时,并再次溢出进入中断,翻转LED1。
使用内部4MHz,定时器进行256分频,周期为15625Hz,定时器初始值0x2000,溢出需要57344计数。
溢出时间为57344/15625=3.67s
en_result_t BtTimerTest(void)
{
stc_bt_config_t stcConfig;
en_result_t enResult = Error;
uint16_t u16ArrData = 0xF000; // 重载值
uint16_t u16InitCntData = 0xF000; // 计数值
EnableNvic(TIM0_IRQn, 3, TRUE);
Bt_EnableIrq(TIM0);
// P35设置为门控使能IO
Gpio_SetFunc_TIM0_GATE_P35();
stcConfig.pfnTim0Cb = Bt0Int;
stcConfig.enGateP = BtPositive;
stcConfig.enGate = BtGateEnable;
stcConfig.enPRS = BtPCLKDiv256;
stcConfig.enTog = BtTogDisable;
stcConfig.enCT = BtTimer;
stcConfig.enMD = BtMode2;
// Bt初始化
if (Ok != Bt_Init(TIM0, &stcConfig)) {
enResult = Error;
}
//设置重载值和计数值,启动计数
Bt_ARRSet(TIM0, u16ArrData);
Bt_Cnt16Set(TIM0, u16InitCntData);
Bt_Run(TIM0);
//此处进入中断……
while (1) {
//判断是否第二次进入中断
if (0x02 == u32BtTestFlag) {
u32BtTestFlag = u32BtTestFlag & (~0x02);
if (10 == u32Cnt) {
Bt_Stop(TIM0);
enResult = Ok;
break;
}
u32Cnt++;
}
}
return enResult;
}这里是对定时器的设置,已经门控引脚的设置。
void Bt0Int(void)
{
if (TRUE == Bt_GetIntFlag(TIM0)) {
Bt_ClearIntFlag(TIM0);
u32BtTestFlag = 0x02;
Data = ~Data;
Gpio_SetIO(2, 3, Data);
}
}在中断中翻转LED1。
bt_tog例程
本样例展示翻转输出功能,可输出两路相位相反的波形,该功能可用于驱动Buzzer。
使用内部4MHz,定时器进行64分频,周期为62500Hz,定时器初始值0x0BDC,溢出需要62500计数。
溢出时间为1s,间隔1s翻转一次,翻转10次后停止。
en_result_t BtTogTest(void)
{
stc_bt_config_t stcConfig;
en_result_t enResult = Ok;
///<(4Mhz->1000Hz)
uint16_t u16ArrData = 0x0BDC;
uint16_t u16InitCntData = 0x0BDC;
// config P14/P15 as toggleB/toggle
Gpio_SetFunc_TIM2_TOGN_P14();
Gpio_SetFunc_TIM2_TOG_P15();
EnableNvic(TIM2_IRQn, 3, TRUE);
Bt_EnableIrq(TIM2);
stcConfig.pfnTim2Cb = Bt2Int;
stcConfig.enGateP = BtPositive;
stcConfig.enGate = BtGateDisable;
stcConfig.enPRS = BtPCLKDiv64;
stcConfig.enTog = BtTogEnable;
stcConfig.enCT = BtTimer;
stcConfig.enMD = BtMode2;
if (Ok != Bt_Init(TIM2, &stcConfig)) {
enResult = Error;
}
//设置重载值,计数值,启动计数
Bt_ARRSet(TIM2, u16ArrData);
Bt_Cnt16Set(TIM2, u16InitCntData);
Bt_Run(TIM2);
//等待波形输出……
u32Cnt = 10;
while (u32Cnt)
;
Bt_Stop(TIM2);
return enResult;
}在中断中进行自减计数。
void Bt2Int(void)
{
if (TRUE == Bt_GetIntFlag(TIM2)) {
Bt_ClearIntFlag(TIM2);
u32BtTestFlag = 0x04;
u32Cnt--;
}
}定时器在软件设计中非常常用,2380提供的库还是很好用。
这里简单说一下,下一节要将的lpt,低功耗定时器,因为例程中需要用到的引脚模块并没有引出,所以这一节的例程就没有改,也没做,需要用到的时候读一下例程应该就会用了,都差不多。
边栏推荐
猜你喜欢
Node-2.垃圾回收机制
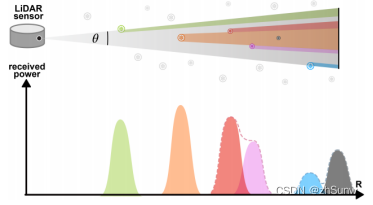
LiDAR Snowfall Simulation for Robust 3D Object Detection
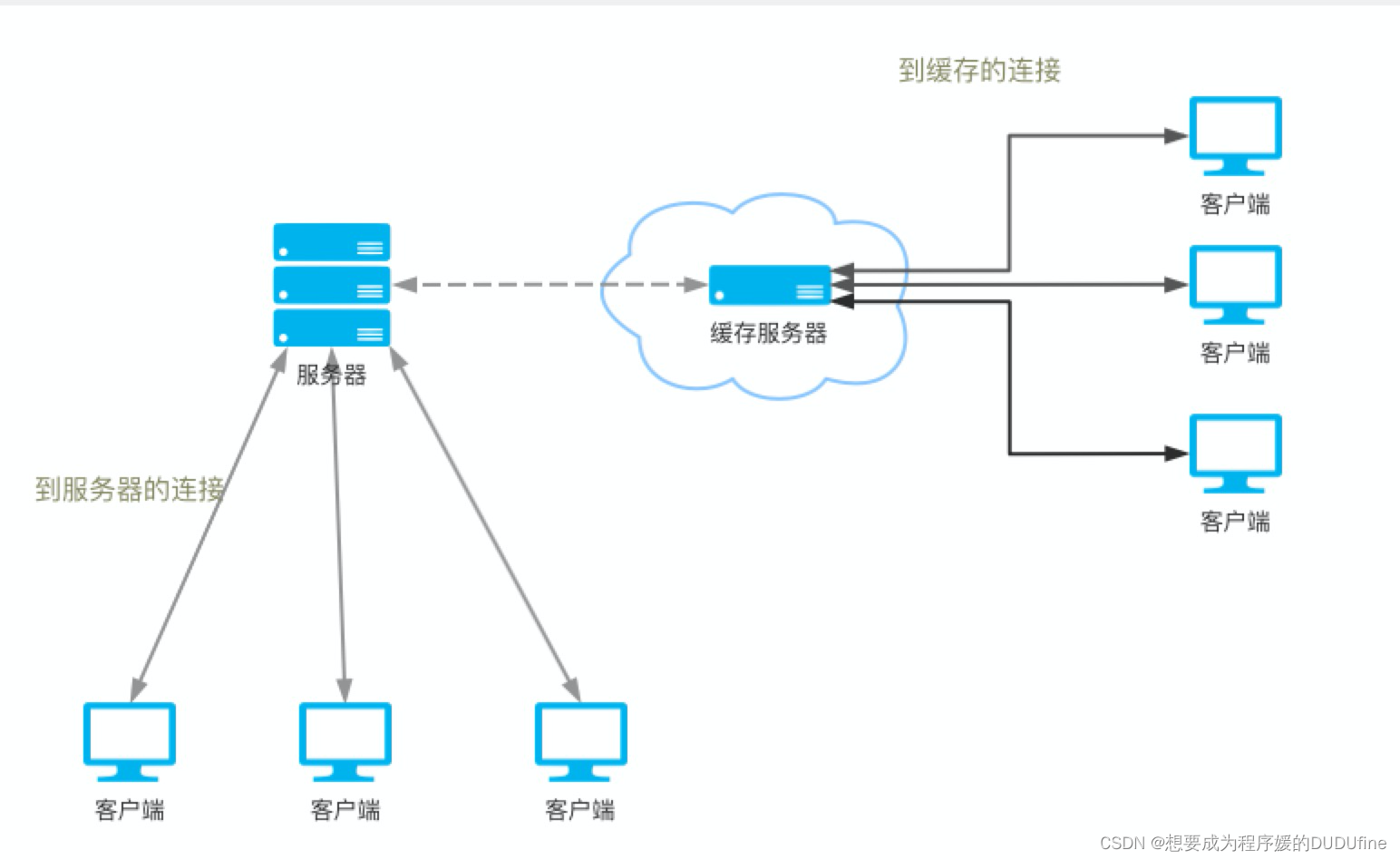
HTTP缓存机制详解
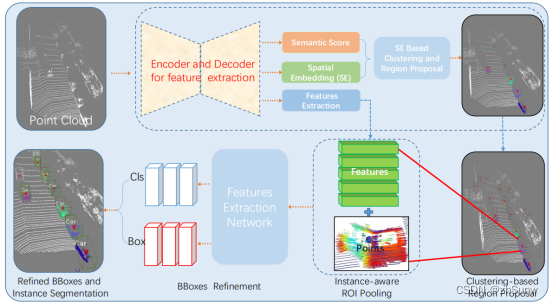
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
Robust 3D Object Detection in Cold Weather Conditions
恶劣天气 3D 目标检测数据集收集
Mei cole studios - deep learning second BP neural network
Toward a Unified Model
Mei cole studios - sixth DjangoWeb application framework + MySQL database training
CVPR2022——A VERSATILE MULTI-VIEW FRAMEWORK
随机推荐
Socket 网络协议 等
第七届集美大学程序设计竞赛(个人赛)题解
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第五次培训
慢查询语句的优化思路
秦始皇到底叫嬴政还是赵政?
Wisdom construction site safety helmet identification system
Hard hat identification
>>开发工具:IDEA格式化代码无效
【高德地图】易采坑合集
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第六次培训
目标检测学习目录(持续更新)
华为手机软键盘挡住Toast
CNN-based Point Cloud De-Noising
Rethinking LiDAR Object Detection in adverse weather conditions
Node-3.构建Web应用(一)
The selection points you need to know about the helmet identification system
数据库(其二)
Toward a Unified Model
安全帽识别系统-解决监管难题
浙江大学软件学院2020年保研上机真题练习