当前位置:网站首页>SCNet: Semantic Consistency Networks for 3D Object Detection
SCNet: Semantic Consistency Networks for 3D Object Detection
2022-08-11 06:16:00 【zhSunw】
The framework uses VoteNet and PointNet++ as the pipeline.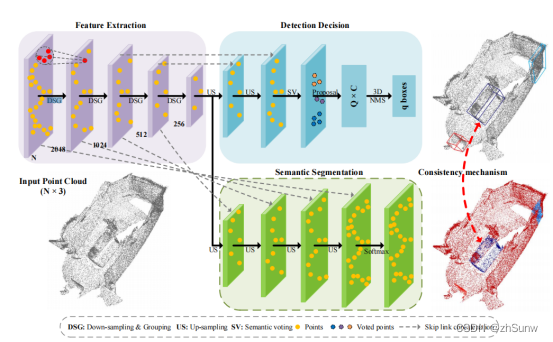
- Semantic Voting: Semantic information is also used as information for each point voting (prediction)
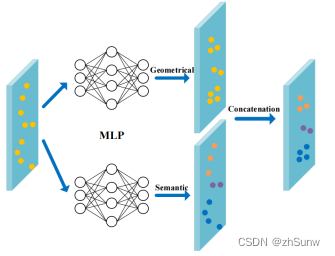
- The two MLP branches complete the voting of normal VoteNet (xyz coordinates and feature features) and Semantic Vote respectively
- Combines the two branch predictions at each point
- Loss Function

Set hyperparameter weights for eachTask loss is weighted - Semantic Consistency Mechanism and Loss
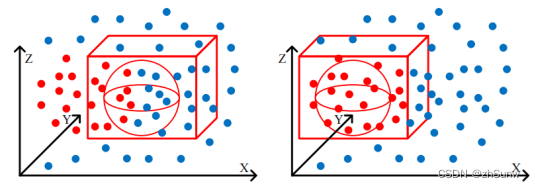
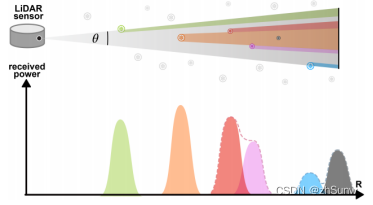
as aboveAs shown, take the center of each BBox as the center of the sphere, and set the point within the sphere with a radius of 0.2m to calculate the semantic consistency loss: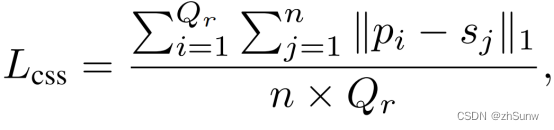
pi is the predicted probability of BBox, sj is the semantic information of each query point.
The model can learn the relationship between geometric information and semantic information, making the prediction of BBOX more accurate.
边栏推荐
猜你喜欢




随机推荐
emqx创建规则引擎写入tDengine
如何修改严格模式让MySQL5.7插入用户表的方式新建用户成功?delete和drop的不同
RIP综合实验
NodeRed系列—nodered安装及基本操作
MPLS 实验
微信小程序-腾讯云即时通信 IM 小程序直播(一)
【uniapp】跨端开发问题记录
GBase 8s是如何保证数据一致性
LiDAR Snowfall Simulation for Robust 3D Object Detection
Pay “Attention” to Adverse Weather
Realize data exchange between kernel and userspace through character device virtual file system (passed based on kernel 5.8 test)
mysql基本概念之存储引擎
TAMNet: A loss-balanced multi-task model for simultaneous detection and segmentation
GBase 8s共享内存中的常驻内存段
关于修改挂载到宿主机上的mysql配置文件不生效这件事
架构设计杂谈
CVPR2022——A VERSATILE MULTI-VIEW FRAMEWORK
动画(其一)
目标检测——Faster R-CNN 之 Fast R-CNN
LAGRANGIAN FLUID SIMULATION WITH CONTINUOUS CONVOLUTIONS