当前位置:网站首页>STM32F407-浅~~析UART异步通信&USART_Init函数入口参数
STM32F407-浅~~析UART异步通信&USART_Init函数入口参数
2022-08-11 05:25:00 【Archimedes' boat】
首先看看 异步通信需要定义的参数:

再看看 此串口运行框图:

下面虚线方框的USART_BRR寄存器是设置USARTDIV分频系数的,可以看到fPCLKx(x=1,2)时钟先经过 /USARTDIV,再经过/(8x(2-OVER8)),由于OVER8一般设置为0,所以就是/8x2,即为16分频,最终发送器时钟和接收器时钟的频率(即为波特率)由下表计算:
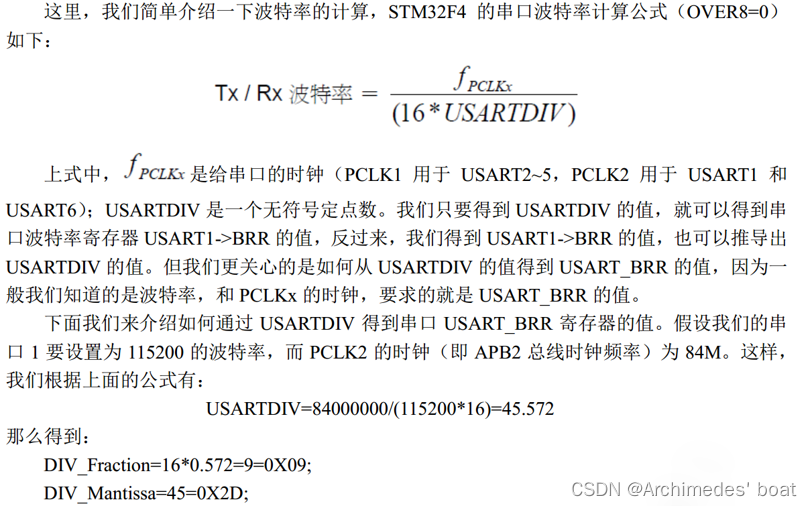
再比如:
如果波特率是96000,那么USARTDIV=54.6875,
那么得到:
DIV_Fraction=16*0.6875=11(正好是11)=0x0B;
DIV_Mantissa=54=0x36;
下面看USART_Init函数
先上代码:
/**
* @brief Initializes the USARTx peripheral according to the specified
* parameters in the USART_InitStruct .
* @param USARTx: where x can be 1, 2, 3, 4, 5, 6, 7 or 8 to select the USART or
* UART peripheral.
* @param USART_InitStruct: pointer to a USART_InitTypeDef structure that contains
* the configuration information for the specified USART peripheral.
* @retval None
*/
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
{
uint32_t tmpreg = 0x00, apbclock = 0x00;
uint32_t integerdivider = 0x00;
uint32_t fractionaldivider = 0x00;
RCC_ClocksTypeDef RCC_ClocksStatus;
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_BAUDRATE(USART_InitStruct->USART_BaudRate));
assert_param(IS_USART_WORD_LENGTH(USART_InitStruct->USART_WordLength));
assert_param(IS_USART_STOPBITS(USART_InitStruct->USART_StopBits));
assert_param(IS_USART_PARITY(USART_InitStruct->USART_Parity));
assert_param(IS_USART_MODE(USART_InitStruct->USART_Mode));
assert_param(IS_USART_HARDWARE_FLOW_CONTROL(USART_InitStruct->USART_HardwareFlowControl));
/* The hardware flow control is available only for USART1, USART2, USART3 and USART6 */
if (USART_InitStruct->USART_HardwareFlowControl != USART_HardwareFlowControl_None)
{
assert_param(IS_USART_1236_PERIPH(USARTx));
}
/*---------------------------- USART CR2 Configuration -----------------------*/
tmpreg = USARTx->CR2;
/* Clear STOP[13:12] bits */
tmpreg &= (uint32_t)~((uint32_t)USART_CR2_STOP);
/* Configure the USART Stop Bits, Clock, CPOL, CPHA and LastBit :
Set STOP[13:12] bits according to USART_StopBits value */
tmpreg |= (uint32_t)USART_InitStruct->USART_StopBits;
/* Write to USART CR2 */
USARTx->CR2 = (uint16_t)tmpreg;
/*---------------------------- USART CR1 Configuration -----------------------*/
tmpreg = USARTx->CR1;
/* Clear M, PCE, PS, TE and RE bits */
tmpreg &= (uint32_t)~((uint32_t)CR1_CLEAR_MASK);
/* Configure the USART Word Length, Parity and mode:
Set the M bits according to USART_WordLength value
Set PCE and PS bits according to USART_Parity value
Set TE and RE bits according to USART_Mode value */
tmpreg |= (uint32_t)USART_InitStruct->USART_WordLength | USART_InitStruct->USART_Parity |
USART_InitStruct->USART_Mode;
/* Write to USART CR1 */
USARTx->CR1 = (uint16_t)tmpreg;
/*---------------------------- USART CR3 Configuration -----------------------*/
tmpreg = USARTx->CR3;
/* Clear CTSE and RTSE bits */
tmpreg &= (uint32_t)~((uint32_t)CR3_CLEAR_MASK);
/* Configure the USART HFC :
Set CTSE and RTSE bits according to USART_HardwareFlowControl value */
tmpreg |= USART_InitStruct->USART_HardwareFlowControl;
/* Write to USART CR3 */
USARTx->CR3 = (uint16_t)tmpreg;
/*---------------------------- USART BRR Configuration -----------------------*/
/* Configure the USART Baud Rate */
RCC_GetClocksFreq(&RCC_ClocksStatus);
if ((USARTx == USART1) || (USARTx == USART6))
{
apbclock = RCC_ClocksStatus.PCLK2_Frequency;
}
else
{
apbclock = RCC_ClocksStatus.PCLK1_Frequency;
}
/* Determine the integer part */
if ((USARTx->CR1 & USART_CR1_OVER8) != 0)
{
/* Integer part computing in case Oversampling mode is 8 Samples */
integerdivider = ((25 * apbclock) / (2 * (USART_InitStruct->USART_BaudRate)));
}
else /* if ((USARTx->CR1 & USART_CR1_OVER8) == 0) */
{
/* Integer part computing in case Oversampling mode is 16 Samples */
integerdivider = ((25 * apbclock) / (4 * (USART_InitStruct->USART_BaudRate)));
}
tmpreg = (integerdivider / 100) << 4;
/* Determine the fractional part */
fractionaldivider = integerdivider - (100 * (tmpreg >> 4));
/* Implement the fractional part in the register */
if ((USARTx->CR1 & USART_CR1_OVER8) != 0)
{
tmpreg |= ((((fractionaldivider * 8) + 50) / 100)) & ((uint8_t)0x07);
}
else /* if ((USARTx->CR1 & USART_CR1_OVER8) == 0) */
{
tmpreg |= ((((fractionaldivider * 16) + 50) / 100)) & ((uint8_t)0x0F);
}
/* Write to USART BRR register */
USARTx->BRR = (uint16_t)tmpreg;
}
实际上不需要完全理解这个函数是怎么写的,只需要会用,然后用熟了之后再考虑原理问题。
再分析入口参数:
其一:USART_TypeDef* USARTx
根据
assert_param(IS_USART_ALL_PERIPH(USARTx));
#define IS_USART_ALL_PERIPH(PERIPH) (((PERIPH) == USART1) || \
((PERIPH) == USART2) || \
((PERIPH) == USART3) || \
((PERIPH) == UART4) || \
((PERIPH) == UART5) || \
((PERIPH) == USART6) || \
((PERIPH) == UART7) || \
((PERIPH) == UART8))
#define USART1 ((USART_TypeDef *) USART1_BASE)
#define USART2 ((USART_TypeDef *) USART2_BASE)
#define USART3 ((USART_TypeDef *) USART3_BASE)
#define UART4 ((USART_TypeDef *) UART4_BASE)
#define UART5 ((USART_TypeDef *) UART5_BASE)
#define USART6 ((USART_TypeDef *) USART6_BASE)
#define UART7 ((USART_TypeDef *) UART7_BASE)
#define UART8 ((USART_TypeDef *) UART8_BASE)

可以看到确实是只定义了6个。:

其二:USART_InitTypeDef* USART_InitStruct
根据
typedef struct
{
uint32_t USART_BaudRate; /*!< This member configures the USART communication baud rate.
The baud rate is computed using the following formula:
- IntegerDivider = ((PCLKx) / (8 * (OVR8+1) * (USART_InitStruct->USART_BaudRate)))
- FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 8 * (OVR8+1)) + 0.5
Where OVR8 is the "oversampling by 8 mode" configuration bit in the CR1 register. */
uint16_t USART_WordLength; /*!< Specifies the number of data bits transmitted or received in a frame.
This parameter can be a value of @ref USART_Word_Length */
uint16_t USART_StopBits; /*!< Specifies the number of stop bits transmitted.
This parameter can be a value of @ref USART_Stop_Bits */
uint16_t USART_Parity; /*!< Specifies the parity mode.
This parameter can be a value of @ref USART_Parity
@note When parity is enabled, the computed parity is inserted
at the MSB position of the transmitted data (9th bit when
the word length is set to 9 data bits; 8th bit when the
word length is set to 8 data bits). */
uint16_t USART_Mode; /*!< Specifies wether the Receive or Transmit mode is enabled or disabled.
This parameter can be a value of @ref USART_Mode */
uint16_t USART_HardwareFlowControl; /*!< Specifies wether the hardware flow control mode is enabled
or disabled.
This parameter can be a value of @ref USART_Hardware_Flow_Control */
} USART_InitTypeDef;
逐个分析每个成员的作用:
USART_BaudRate:
BaudRate就是波特率,顾名思义就是配置波特率的。
USART_WordLength:
指定帧中传输或接收的数据位数,顾名思义就是字长。
USART_StopBits:
指定传输的停止位数。
USART_Parity:
Parity同等的,对等的,就是指定奇偶校验模式。
USART_Mode:
指定启用或禁用接收或发送模式。
USART_HardwareFlowControl:
指定硬件流控制模式是启用还是禁用。
用法下一篇再说。
Fin.
边栏推荐
- CMT2380F32模块开发4-UART例程
- The kernel communicates with user space through character devices
- Safety helmet recognition - construction safety "regulator"
- Hardhat Recognition System - Solving Regulatory Conundrums
- 华为IOT设备消息上报和消息下发验证
- 梅科尔工作室-HarmonyOS应用开发的第二次培训
- Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
- 梅科尔工作室-Pr第二次培训笔记(基本剪辑操作和导出)
- LAGRANGIAN FLUID SIMULATION WITH CONTINUOUS CONVOLUTIONS
- 目标检测——Faster-RCNN 之 RCNN
猜你喜欢


随机推荐
NUC980-镜像烧录
梅科尔工作室-HarmonyOS应用开发第三次培训
Maykle Studio - Second Training in HarmonyOS App Development
安全帽佩戴识别系统介绍
Maykel Studio - Django Web Application Framework + MySQL Database Third Training
目标检测——LeNet
网络七层结构(讲人话)
aPaaS和iPaaS的区别
Safety helmet recognition - construction safety "regulator"
CVPR2020: Seeing Through Fog Without Seeing Fog
Diagnostic Log and Trace——开发人员如何使用 DLT
梅科尔工作室-第四次PR培训笔记(字幕和标题动画,关键帧动画和声音处理)
CNN-based Point Cloud De-Noising
Use regex to verify whether the file name is legal
Rethinking LiDAR Object Detection in adverse weather conditions
SCNet: Semantic Consistency Networks for 3D Object Detection
目标检测——卷积神经网路基础知识
Diagnostic Log and Trace——DLT 离线日志存储
产品版本号是如何确定的
KANO模型——确定需求优先级的神器