当前位置:网站首页>STM32-串口常用寄存器和库函数及配置串口步骤
STM32-串口常用寄存器和库函数及配置串口步骤
2022-08-11 05:25:00 【Archimedes' boat】
目录
常用的串口相关寄存器
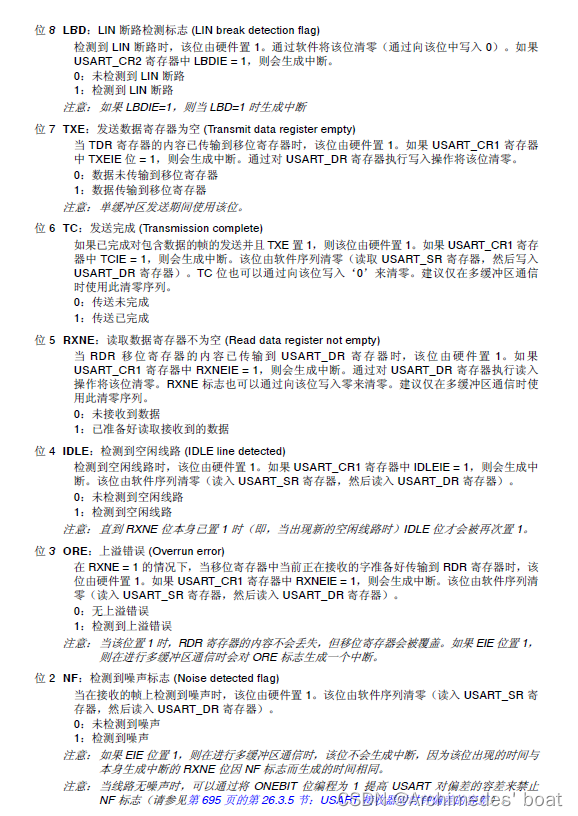
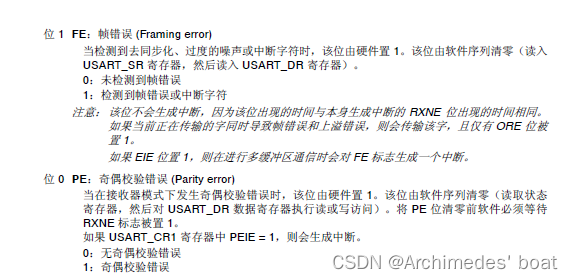
USART_SR状态寄存器:
串口在运行过程中的一些状态由其设定,如,发送完成后其某位为0或1的标志位。
主要用到其0~9位。

那么可以用如下函数来查看:
FlagStatus USART_GetFlagStatus();//获取状态标志位加上定义:
typedef enum {RESET = 0, SET = !RESET} FlagStatus, ITStatus;加上函数全代码:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)
{
FlagStatus bitstatus = RESET;
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_FLAG(USART_FLAG));
/* The CTS flag is not available for UART4 and UART5 */
if (USART_FLAG == USART_FLAG_CTS)
{
assert_param(IS_USART_1236_PERIPH(USARTx));
}
if ((USARTx->SR & USART_FLAG) != (uint16_t)RESET)
{
bitstatus = SET;
}
else
{
bitstatus = RESET;
}
return bitstatus;
}还有USART_GetFlagStatus这个函数入口参数:
#define IS_USART_ALL_PERIPH(PERIPH) (((PERIPH) == USART1) || \
((PERIPH) == USART2) || \
((PERIPH) == USART3) || \
((PERIPH) == UART4) || \
((PERIPH) == UART5) || \
((PERIPH) == USART6) || \
((PERIPH) == UART7) || \
((PERIPH) == UART8))
#define IS_USART_FLAG(FLAG) (((FLAG) == USART_FLAG_PE) || ((FLAG) == USART_FLAG_TXE) || \
((FLAG) == USART_FLAG_TC) || ((FLAG) == USART_FLAG_RXNE) || \
((FLAG) == USART_FLAG_IDLE) || ((FLAG) == USART_FLAG_LBD) || \
((FLAG) == USART_FLAG_CTS) || ((FLAG) == USART_FLAG_ORE) || \
((FLAG) == USART_FLAG_NE) || ((FLAG) == USART_FLAG_FE))我们可以看到最后会返回SET或者RESET这两个值,SET就是1,RESET就是0
然后根据USARTx选择对应串口号,根据USART_FLAG选择相应的位数。
USART_DR数据寄存器:
写数据往其中写,读数据在其中读。
主要用到0~8位,就是一共9位。

那么可以用如下两个函数来查看和写入:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);函数全代码:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
assert_param(IS_USART_DATA(Data));
/* Transmit Data */
USARTx->DR = (Data & (uint16_t)0x01FF);
}uint16_t USART_ReceiveData(USART_TypeDef* USARTx)
{
/* Check the parameters */
assert_param(IS_USART_ALL_PERIPH(USARTx));
/* Receive Data */
return (uint16_t)(USARTx->DR & (uint16_t)0x01FF);
}USART_BRR波特率寄存器:
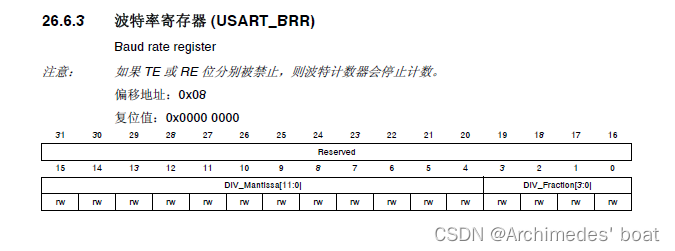
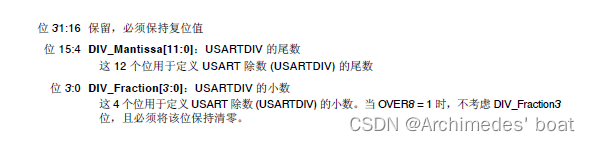
通过上篇笔记的USARTDIV分频系数由BRR寄存器控制可知:

DIV_Fraction就是小数部分,DIV_Mantissa就是整数部分(尾数部分)。
那么可以用如下函数来写入波特率:
USART_Init(上篇文章提到过)
串口配置
左边红圈的是PA9接上RXD(receive external data,即接收外部设备传来的数据,也称为接收数据的引脚),右边红圈的是PA10接上TXD(transmit external data,和RXD相反),都连接USB 232,可以通过USB 232进行串口通信。

串口配置的一般步骤:
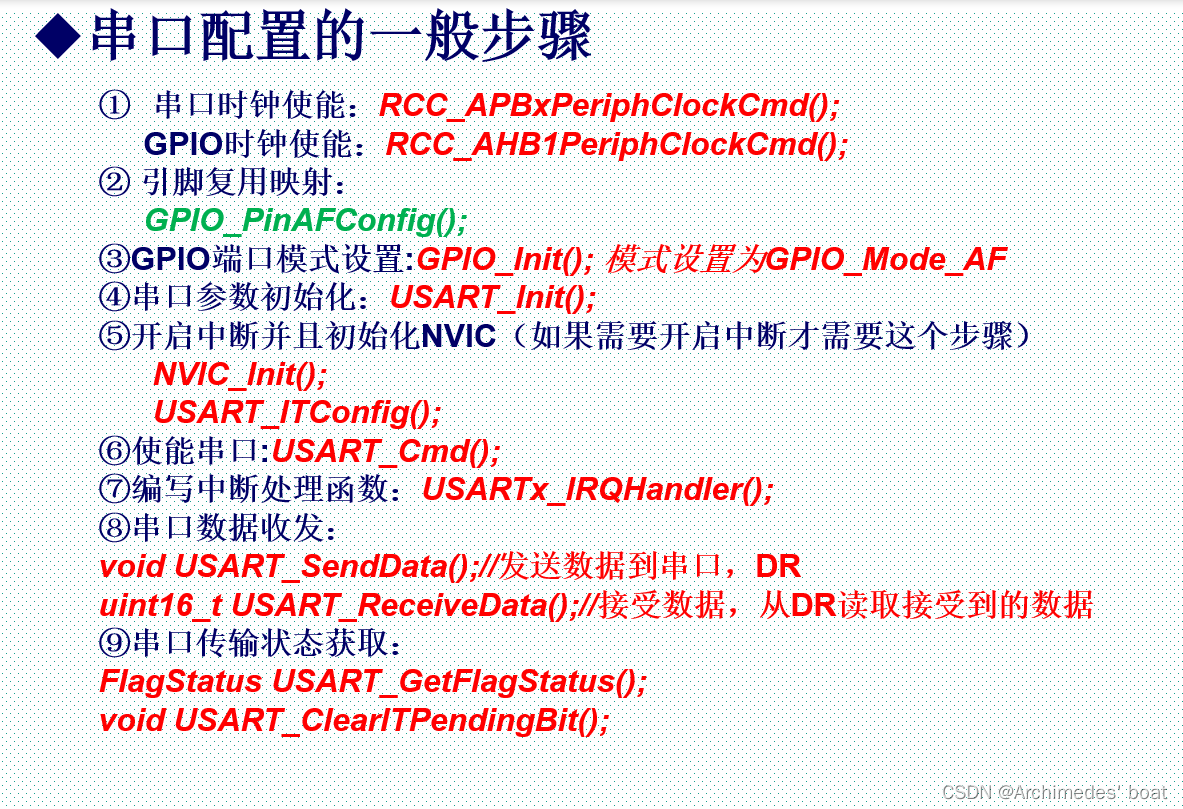
①时钟使能
根据PCLK1用于USART2~5,PCLK2用于USART1、6,比如我想配置USART1,就应该使用
APB2时钟:
调用:void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
这个函数在stm32f4xx_rcc.c中。
使用示例:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//使能UASRT1时钟而GPIO的时钟初始化都用AHB1!
调用:RCC_AHB1PeriphClockCmd;
同样在stm32f4xx_rcc.h中。
使用示例:
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
②引脚复用映射
调用:GPIO_PinAFConfig;
在stm32f4xx_gpio.h中。
使用示例:
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);//°ÑPA9Ó³Éäµ½´¿Ú1③GPIO端口模式设置
调用:GPIO_Init();模式设置为GPIO_Mode_AF
在stm32f4xx_gpio.h中。
使用示例:
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//串口复用
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure);
④串口初始化
调用:USART_Init();
在stm32f4xx_usart.h中。
使用示例:
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=96000;
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//不用硬件流控制
USART_InitStruct.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;//使能发送Rx或者接收Tx都行
USART_InitStruct.USART_Parity=USART_Parity_Odd;
USART_InitStruct.USART_StopBits=USART_StopBits_1;//停止位,有0.5个、1个、1.5个、2个
USART_InitStruct.USART_WordLength=USART_WordLength_8b;//8位字长
USART_Init(USART1, &USART_InitStruct);//注意USART_InitStruct是取地址
⑤开启中断并初始化NVIC
调用:NVIC_Init();
在misc.h中。
USART_ITConfig();
在stm32f4xx_usart.h中。
使用示例:
NVIC_InitTypeDef NVIC_InitStruct;
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//USART_IT_RXNE就是说只要stm32收到数据,就会产生一个中断
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;//注意是串口1
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;//使能串口1
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级是1
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;//响应优先级是1
NVIC_Init(&NVIC_InitStruct);
⑥使能串口
调用:USART_Cmd();
在stm32f4xx_usart.h中。
使用示例:
USART_Cmd(USART1, ENABLE);
⑦、⑧、⑨
调用:
⑦编写中断处理函数:
USARTx_IRQHandler();
⑧串口数据收发:
void USART_SendData();//发送数据到串口,通过DR寄存器
uint16_t USART_ReceiveData();//接受数据,从DR寄存器读取接受到的数据
⑨串口传输状态获取:
FlagStatusUSART_GetFlagStatus();
void USART_ClearITPendingBit();
使用示例:
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1, USART_IT_RXNE))
{
res=USART_ReceiveData(USART1);//½ÓÊÕ´ÓµçÄÔÀ´µÄÊý¾Ý
USART_SendData(USART1, res);//·¢ËÍÊý¾Ýµ½µçÄÔ
}
}
这里编译会显示重复定义,原因是SYSTEM文件夹下有个usart.c里面已经定义了这个函数,可以直接删掉这个文件。
最后上总代码:
#include "stm32f4xx.h"
#include "usart.h"
#include "delay.h"
void My_USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//ʹÄÜUSART1ʱÖÓ
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);//°ÑPA9Ó³Éäµ½´¿Ú1
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);//°ÑPA10Ó³Éäµ½´¿Ú1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStruct.USART_BaudRate=9600;
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//²»ÓÃÓ²¼þÁ÷¿ØÖÆ
USART_InitStruct.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;//ʹÄÜ·¢ËÍRx»òÕß½ÓÊÕTx¶¼ÐÐ
USART_InitStruct.USART_Parity=USART_Parity_No;//ÆæżУÑéλÊÇÎÞ
USART_InitStruct.USART_StopBits=USART_StopBits_1;//ֹͣ룬ÓÐ0.5¸ö¡¢1¸ö¡¢1.5¸ö¡¢2¸ö
USART_InitStruct.USART_WordLength=USART_WordLength_8b;//8λ×Ö³¤
USART_Init(USART1, &USART_InitStruct);//×¢ÒâUSART_InitStructÊÇÈ¡µØÖ·
USART_Cmd(USART1, ENABLE);//ʹÄÜ´¿Ú
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//USART_IT_RXNE¾ÍÊÇ˵ֻҪstm32ÊÕµ½Êý¾Ý£¬¾Í»á²úÉúÒ»¸öÖжÏ
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;//×¢ÒâÊÇ´¿Ú1
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;//ʹÄÜ´¿Ú1
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=1;//ÇÀÕ¼ÓÅÏȼ¶ÊÇ1
NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;//ÏìÓ¦ÓÅÏȼ¶ÊÇ1
NVIC_Init(&NVIC_InitStruct);
}
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1, USART_IT_RXNE))
{
res=USART_ReceiveData(USART1);//½ÓÊÕ´ÓµçÄÔÀ´µÄÊý¾Ý
USART_SendData(USART1, res);//·¢ËÍÊý¾Ýµ½µçÄÔ
}
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//½øÐÐÓÅÏȼ¶·Ö×é
My_USART1_Init();
while(1);//µÈ´ýÆäËûÉ豸·¢ËÍÊý¾Ý£¬ÓÐÊý¾Ý¾Í½øÖжϣ¬¸úÖ÷Ñ»·ÎÞ¹ØÁË
}
通过XCOM串口调试工具我们可以知道发给STM32什么,STM32就会发回来什么。
此处奇偶校验位只能填无,如果是奇校验或者偶校验返回值可能是乱码。
Fin.
边栏推荐
- 基于AI智能图像识别:4个不同的行业应用
- Maykle Studio - Second Training in HarmonyOS App Development
- Robust 3D Object Detection in Cold Weather Conditions
- NUC980-开发环境搭建
- Mei cole studios - deep learning second BP neural network
- Maykle Studio - HarmonyOS Application Development First Training
- Rethinking LiDAR Object Detection in adverse weather conditions
- vmware不可恢复错误vmui
- 使用ActiveReports制作第一张报表
- yolov3+centerloss+replay buffer实现单人物跟踪
猜你喜欢
Robust 3D Object Detection in Cold Weather Conditions

梅科尔工作室-PR第三次培训笔记(效果与转场及插件使用)

LAGRANGIAN FLUID SIMULATION WITH CONTINUOUS CONVOLUTIONS
关于mmdetection框架实用小工具说明
使用ActiveReports制作第一张报表

安全帽识别算法

智慧工地 安全帽识别系统
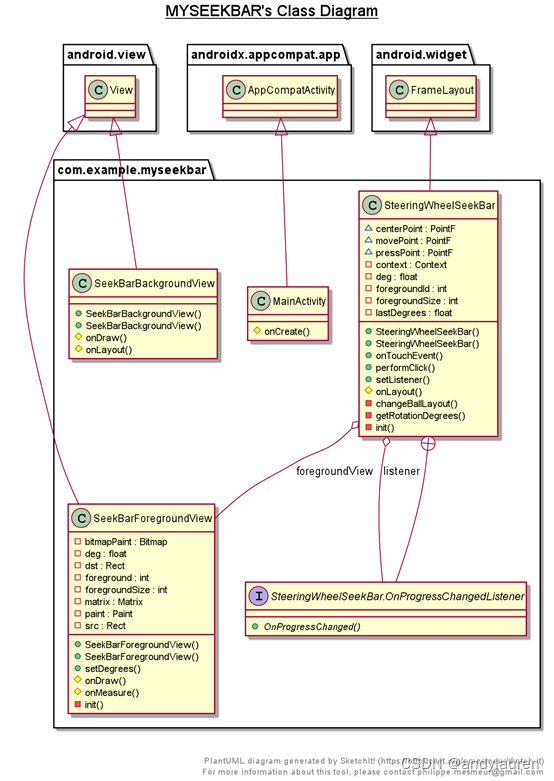
自定义形状seekbar学习--方向盘view
Mei cole studios - sixth DjangoWeb application framework + MySQL database training

关于安全帽识别系统,你需要知道的选择要点
随机推荐
Toward a Unified Model
Waymo dataset usage introduction (waymo-open-dataset)
TAMNet:A loss-balanced multi-task model for simultaneous detection and segmentation
华为IOT平台温度过高时自动关闭设备场景试用
小程序技术原理分析
Reconstruction and Synthesis of Lidar Point Clouds of Spray
CVPR2022——A VERSATILE MULTI-VIEW FRAMEWORK
红外线一认识
梅科尔工作室-DjangoWeb 应用框架+MySQL数据库第六次培训
自定义形状seekbar学习--方向盘view
关于mmdetection框架实用小工具说明
CVPR2022——Not All Points Are Equal : IA-SSD
目标检测——Faster R-CNN 之 Fast R-CNN
使用ActiveReports制作第一张报表
目标检测——LeNet
红外线应用-红外遥控
win10 配置tensorflow(GPU) anaconda3 cuda9.0 cudnn for 9.0
产品经理与演员有着天然的相似
Maykel Studio - Django Web Application Framework + MySQL Database Third Training
浙江大学软件学院2020年保研上机真题练习