当前位置:网站首页>双闭环直流调速系统matlab/simulink仿真
双闭环直流调速系统matlab/simulink仿真
2022-04-23 17:21:00 【叶绿体不忘呼吸】
matlab/simulink搭建文件、完整ppt和word报告:点击查看资源
一、系统原理及框图
因为转速单闭环系统无法按照要求充分控制电流的动态过程,而对于部分生产机械在不同生产状态下需要有不同的转速值和电流值,即要求存在转速和电流两种负反馈,因此采取转速和电流两个调节器。ACR构成内环,ASR构成外环,即双闭环调速系统。
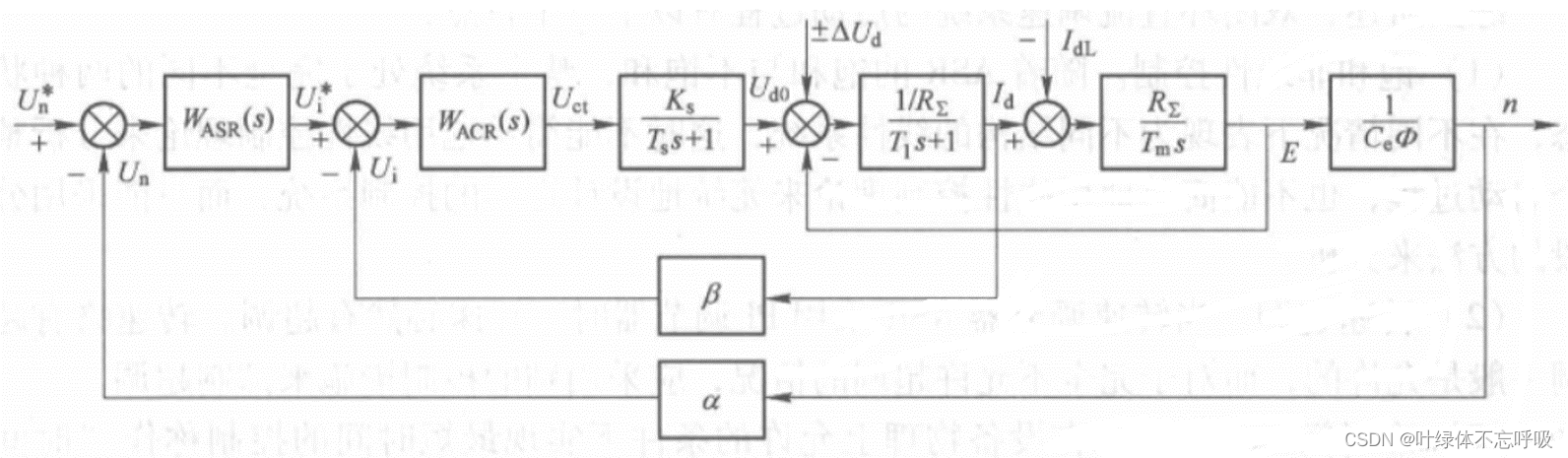
在实际建模中,系统会有一些不一样,反馈环节都要变成一个小惯性环节的低通滤波器,输入端也要有一个相应的惯性环节。(下图分别为电流环和转速换)

二、参数计算与设计

在设计双闭环调速系统时,一般是先内环后外环,调节器的结构和参数取决于稳态精度和动态校正的要求,双闭环调速系统动态校正的设计与调试都是按先内环后外环的顺序进行,在动态过程中可以认为外环对内环几乎无影响,而内环则是外环的一个组成环节。
三、电流环仿真框图
我们需要用积分模块和比例模块搭建PI控制器,然后在输出端加一个限幅模块。设置积分模块的输出限幅,将其设置为和限幅模块相同的限幅值,至此,PI控制器才与实际模拟控制器具有相同工作特性。
四、电流环仿真结果
KT=0.25,无超调,但上升时间长

KT=1,超调大,上升时间短
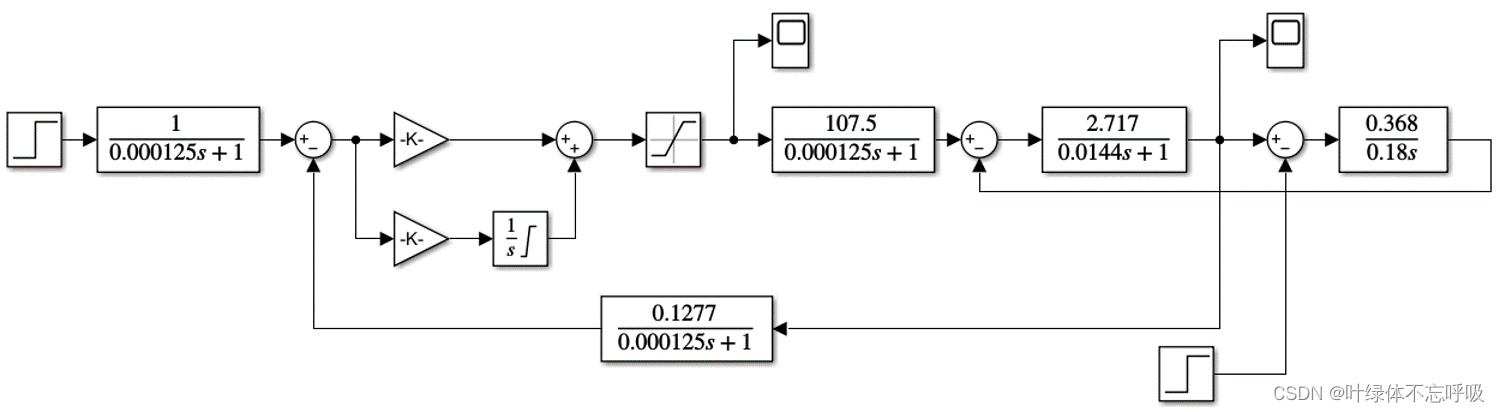
五、双闭环仿真框图

电流调节器作为内环的调节器,在外环转速的调节过程中,它的作用是使电流紧随其给定电压(即外环调节器的输出量)变化。在示波器模块中反应出转速和电流的对应关系。
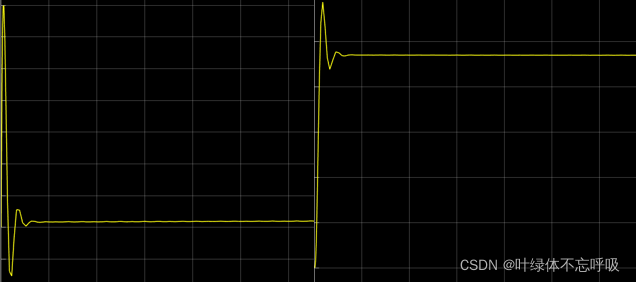
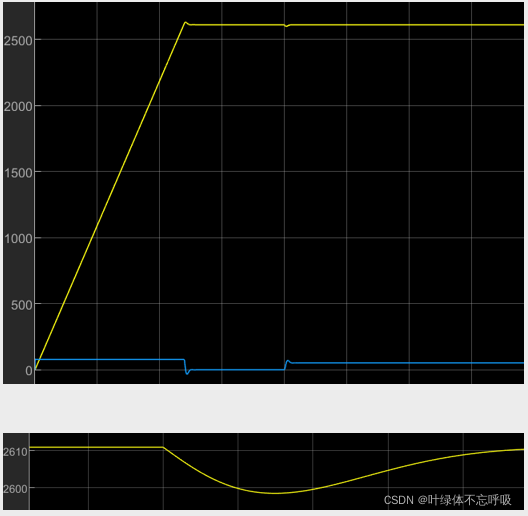
六、双闭环仿真结果
ASR调节器经过了不饱和,饱和,退饱和三个阶段,最终稳定运行于给定转速。当直流电机达到稳态转速后,电流快速下降,保证输出矩阵与负载转矩平衡,电动机进入稳定运行状态。
给定10V,空载

给定10V,满载

在负载电流的输入端加上负载电流。空载起动到稳定运行后在4s时受到额定负载扰动时的转速与电流响应曲线。可以看出加载后转速下降,电流上升拉动转速再次上升,稳态时仍为给定转速。
七、仿真小结
在直流电动机转子转速动态过程中,电流调节器可以保证获得电机允许的最大电流,从而加快动态过程。当电机过载甚至堵转时,限制电枢电流的最大值,保护作用。一旦故障消失,系统立即自动恢复正常。
外环的相应比内环慢,这是按工程设计方法设计多环控制系统的特点,虽然其不利于快速性,但每个控制环本身都是稳定的,有利于对系统的组成和调试。
版权声明
本文为[叶绿体不忘呼吸]所创,转载请带上原文链接,感谢
https://blog.csdn.net/m0_46653805/article/details/124341097
边栏推荐
- Clickhouse table engine
- New keyword learning and summary
- Shell-cut命令的使用
- Excel quickly and automatically fills the contents of a row on a blank cell
- Manually implement simple promise and its basic functions
- [logical fallacy in life] Scarecrow fallacy and inability to refute are not proof
- 1-1 NodeJS
- If you start from zero according to the frame
- How to use the input table one-way service to send (occupy less) picture files (body transmission)? FileReader built-in object involved
- Promise (I)
猜你喜欢
自定义my_strcpy与库strcpy【模拟实现字符串相关函数】

Use between nodejs modules
线性代数感悟之1
Advantages and disadvantages of several note taking software
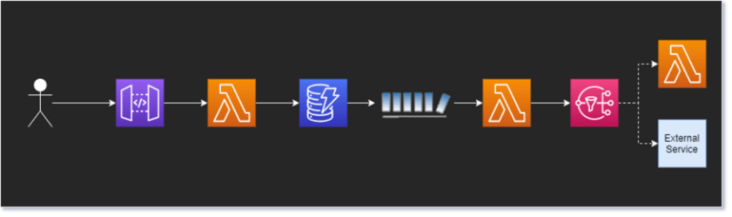
Solution architect's small bag - 5 types of architecture diagrams
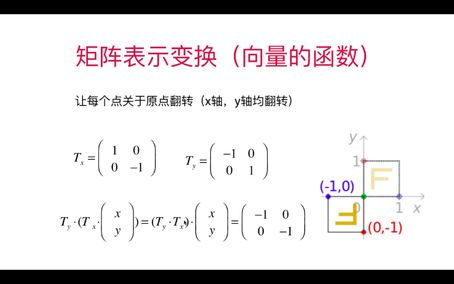
Perception of linear algebra 2
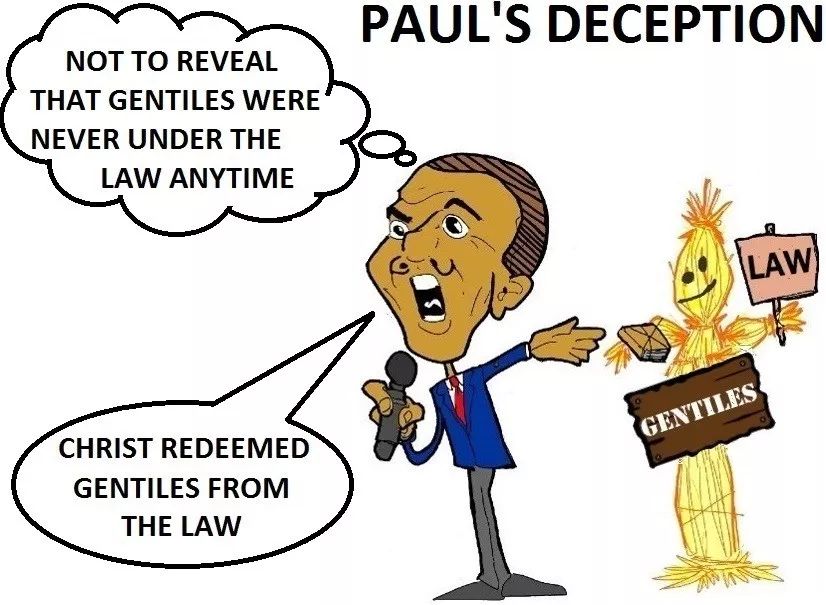
【生活中的逻辑谬误】稻草人谬误和无力反驳不算证明
![Using quartz under. Net core -- operation transfer parameters of [3] operation and trigger](/img/4e/2161fc448f4af71d9b73b7de64a17f.png)
Using quartz under. Net core -- operation transfer parameters of [3] operation and trigger
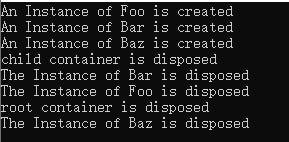
ASP. Net core dependency injection service life cycle
Use of five routing guards
随机推荐
Node template engine (EJS, art template)
Low code development platform sorting
[markdown notes]
ASP. Net core reads the configuration file in the class library project
Collection of common SQL statements
Detailed explanation of C webpai route
Scope and scope chain in JS
JS to find the character that appears three times in the string
Manually implement simple promise and its basic functions
How to change input into text
ClickHouse-SQL 操作
Self use learning notes - connected and non connected access to database
Shell-入门、变量、以及基本的语法
Customize my_ Strcpy and library strcpy [analog implementation of string related functions]
Simulation of infrared wireless communication based on 51 single chip microcomputer
Promise (I)
MySQL modify master database
Go language, array, string, slice
自定义my_strcpy与库strcpy【模拟实现字符串相关函数】
Generate random numbers with high quality and Gaussian distribution