当前位置:网站首页>∑GL-透视投影矩阵的推导
∑GL-透视投影矩阵的推导
2022-04-23 16:39:00 【itzyjr】

计算机显示器是二维表面。由OpenGL渲染的3D场景必须作为2D图像投影到计算机屏幕上。投影矩阵用于此投影变换。首先,它将所有顶点数据从眼睛坐标转换为剪裁坐标。然后,通过与剪裁坐标的w分量相除,这些剪裁坐标也被转换为归一化设备坐标(NDC)。
剪裁坐标:眼睛坐标现在与投影矩阵相乘,成为剪裁坐标。该投影矩阵定义了视锥体——顶点数据投影到屏幕上的方式(透视或正交)。之所以称为剪裁坐标,是因为变换后的顶点(x,y,z)是通过与±wclip进行比较来剪裁的。
视锥体剔除(裁剪)操作是在剪裁坐标中执行的,正好在除以wclip之前。通过与wclip的比较,测试了剪裁坐标xclip、yclip和zclip。因为除以wclip后成为归一化的NDC坐标,所以要满足-1<=xclip/wclip<=1,所以xclip∈[-wclip,wclip];同理yclip∈[-wclip,wclip],zclip∈[-wclip,wclip]。如果任何剪裁坐标小于-wclip或大于wclip,则顶点将被丢弃(剪裁掉)。

因此,我们必须记住,裁剪(视锥体剔除)和NDC变换都集成到投影矩阵中。以下介绍如何从6个参数构建投影矩阵:left、right、bottom、top、near和far边界值。
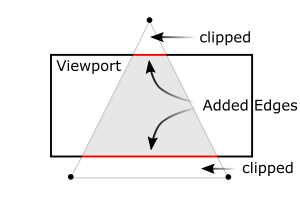
然后,OpenGL将重建发生剪裁的多边形的边(如下图中的两条红线)。
下图中的灰色区域即是保留而未被丢弃的点,满足:xc,yc,zc∈(-wc,wc)
下图展示了透视视锥体和归一化设备坐标(NDC):
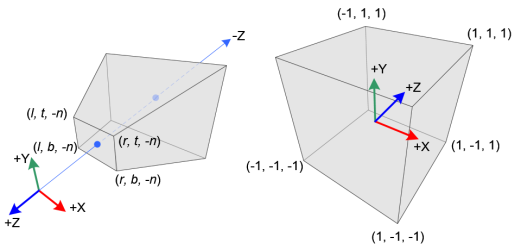
在透视投影中,视锥体的锥台(眼睛坐标)中的3D点被映射到立方体(NDC);x坐标从[l,r]到[-1,1],y坐标从[b,t]到[-1,1],z坐标从[-n,-f]到[-1,1]。
void glFrustum(
// 指定左右垂直剪裁平面的坐标。
GLdouble left, GLdouble right,
// 指定底部和顶部水平剪裁平面的坐标。
GLdouble bottom, GLdouble top,
// 指定到近深度剪裁平面和远深度剪裁平面的距离。两个距离都必须为正。
GLdouble nearVal, GLdouble farVal
);
请注意,眼睛坐标是在右手坐标系中定义的,但NDC使用左手坐标系。也就是说,原点处的相机在眼睛空间中沿-Z轴观看,但在NDC中沿+Z轴观看。由于glFrustum()只接受near和far的正值,因此我们需要在构造投影矩阵时对它们求反。
在OpenGL中,眼睛空间中的一个3D点被投影到近平面(投影平面)上。下图显示了眼睛空间中的一个点(xe,ye,ze)如何投影到近平面上的(xp,yp,zp)。
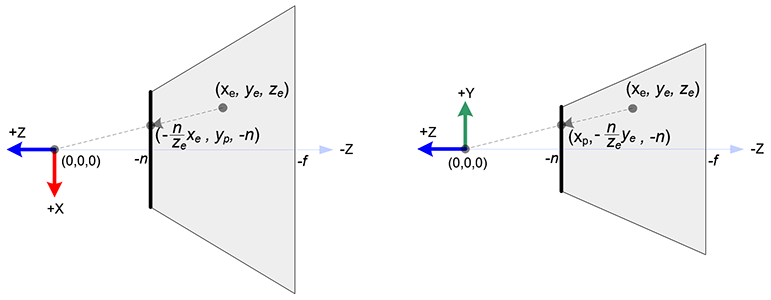
从视锥体的[俯视图],即眼睛空间的x坐标,xe被映射到xp,xp是通过使用相似三角形的比率来计算的:
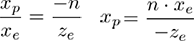
从视锥体的侧面来看,yp也以类似的方式计算:
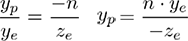
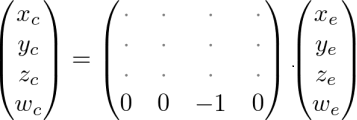
注意xp和yp都依赖于ze;它们与-ze成反比。换句话说,它们都被-ze除。这是构造投影矩阵的第一条线索。通过乘以投影矩阵变换眼睛坐标后,剪裁坐标仍然是齐次坐标。它最终成为标准化设备坐标(NDC),除以剪裁坐标的w分量。(更多细节,见OpenGL_Transformation)

因此,我们可以将剪裁坐标的w分量设置为-ze。投影矩阵的第4行变成(0,0,-1,0)。
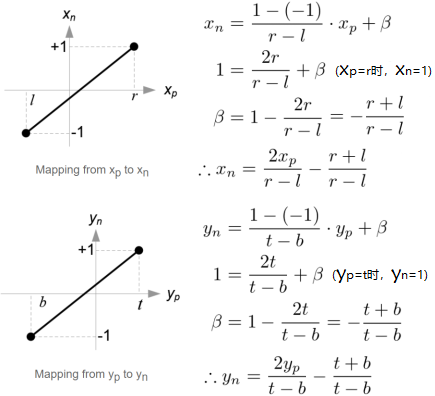
接下来,我们用线性关系将xp和yp映射到NDC的xn和yn;[l,r]⇒ [-1,1]和[b,t]⇒ [-1,1]。
然后,我们将xp和yp代入上述方程。
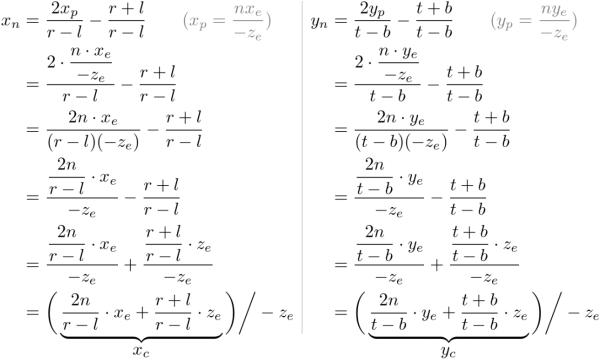
注意,对于透视除法(xc/wc,yc/wc),我们使每个方程的两项都可以被-ze整除。我们在前面将wc设置为-ze,括号内的术语变成了剪裁坐标的xc和yc。
从这些方程中,我们可以找到投影矩阵的第1行和第2行。
现在,我们只需要解第3行投影矩阵。发现zn与其他的有点不同,因为眼睛空间中的ze总是投射到近平面上的-n。但是我们需要唯一的z值来进行裁剪和深度测试。此外,我们应该能够取消投影(逆变换)。因为我们知道z不依赖于x或y值,所以我们借用w分量来寻找zn和ze之间的关系。因此,我们可以这样指定投影矩阵的第3行。
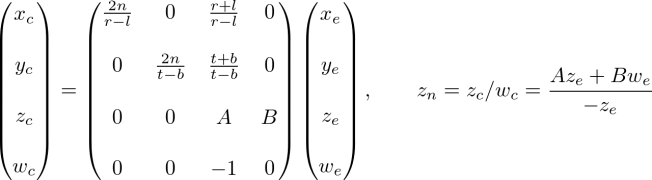
在眼睛空间中,we等于1。因此,方程变为:
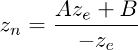
为了求系数A和B,我们使用(ze,zn)关系:(-n,-1)和(-f,1),并将它们放入上述方程中,解出A、B。
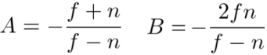
此时,ze与zn的关系变为:
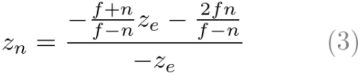
最后,我们找到了投影矩阵的所有条目。完整的投影矩阵是:
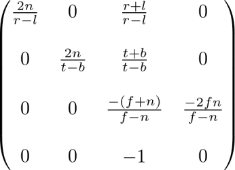
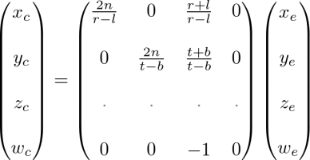
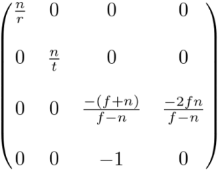
该投影矩阵适用于一般视锥体。如果视体是对称的,即r=-l, t=-b,则可以简化为:
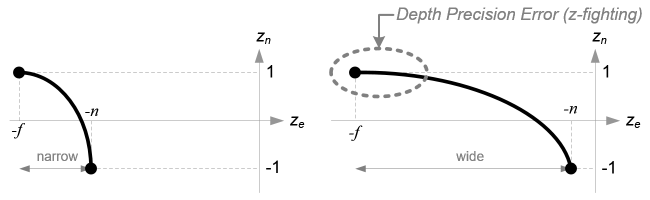
在我们继续之前,请再次看看ze和zn之间的关系,等式(3)。你注意到这是一个有理函数,ze和zn之间是非线性关系(如下图)。这意味着在近平面的精度非常高,但在远平面的精度非常低。如果射程[-n,-f]越来越大,则会导致深度精度问题(z-fighting);远平面附近ze的微小变化不影响zn值。n和f之间的距离应尽可能短,以最小化深度缓冲精度问题。
使用FOV指定的透视投影:
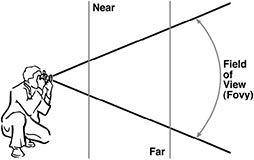
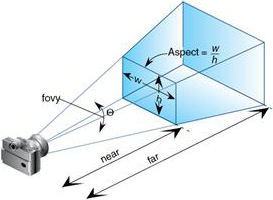
h = 2 × near × tan(θ/2)
w = h × aspect;
对应上述透视投影矩阵中:
r = w/2;t = h/2
所以:
n/r = (2×n)/w
= (2×n)/(h × aspect)
= (2×n)/(2 × n × tan(θ/2) × aspect)
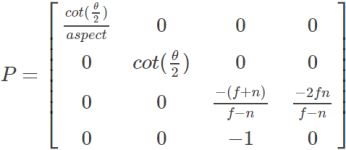
= cot(θ/2)/aspect
同理求得,n/t = cot(θ/2)
则得到透视投影矩阵为:
版权声明
本文为[itzyjr]所创,转载请带上原文链接,感谢
https://blog.csdn.net/itzyjr/article/details/124337143
边栏推荐
- Questions about disaster recovery? Click here
- The most detailed Backpack issues!!!
- MySQL personal learning summary
- How to build tiktok user trust and drive fan growth
- Real time operation of vim editor
- Creation of RAID disk array and RAID5
- MySQL master-slave synchronization pit avoidance version tutorial
- 建站常用软件PhpStudy V8.1图文安装教程(Windows版)超详细
- Research and Practice on business system migration of a government cloud project
- 【PIMF】OpenHarmony啃论文俱乐部—在ACM Survey闲逛是什么体验
猜你喜欢

Best practice of cloud migration in education industry: Haiyun Jiexun uses hypermotion cloud migration products to implement progressive migration for a university in Beijing, with a success rate of 1
欣旺达:HEV和BEV超快充拳头产品大规模出货

What is the experience of using prophet, an open source research tool?

Deepinv20 installation MariaDB
G008-hwy-cc-estor-04 Huawei Dorado V6 storage simulator configuration

安装及管理程序

建站常用软件PhpStudy V8.1图文安装教程(Windows版)超详细
Hypermotion cloud migration completes Alibaba cloud proprietary cloud product ecological integration certification
Day (6) of picking up matlab
文件操作详解(2)
随机推荐
力扣-746.使用最小花费爬楼梯
Sort by character occurrence frequency 451
人脸识别框架之dlib
基于GPU实例的Nanopore数据预处理
Gartner 發布新興技術研究:深入洞悉元宇宙
logback的配置文件加载顺序
Use itextpdf to intercept the page to page of PDF document and divide it into pieces
Redis "8" implements distributed current limiting and delay queues
Qipengyuan horizon credible meta universe social system meets diversified consumption and social needs
JSP learning 2
100 deep learning cases | day 41 - convolutional neural network (CNN): urbansound 8K audio classification (speech recognition)
The solution of not displaying a whole line when the total value needs to be set to 0 in sail software
MySQL的btree索引和hash索引区别
无线鹅颈麦主播麦手持麦无线麦克风方案应当如何选择
Report FCRA test question set and answers (11 wrong questions)
Review 2021: how to help customers clear the obstacles in the last mile of going to the cloud?
Findstr is not an internal or external command workaround
1959年高考数学真题
Day (6) of picking up matlab
Detailed explanation of UWA pipeline function | visual configuration automatic test