当前位置:网站首页>Rtklib 2.4.3 source code Notes
Rtklib 2.4.3 source code Notes
2022-04-23 16:49:00 【haoming Hu】
Last update time :2022-04-20
data structure
prcopt_t Processing options
| Parameters | explain | default setting |
|---|---|---|
| int mode | Positioning mode | PMODE_STATIC |
| int soltype | Solution types (0: forward ,1: backward ,2: Combine ) | 0 |
| int nf | Frequency number (1:L1,2:L1+L2,3:L1+L2+L5) | 2 |
| int navsys | Navigation system , If there are more than one, the macro definition of the system will be defined directly | operation | SYS_CMP | SYS_GPS |
| double elmin | Elevation mask angle | 7.0*D2R |
| snrmask_t snrmask | SNR mask | { { 0,0 } }, |
| int sateph | Almanac Data / The clock (EPHOPT_???) | 0 |
| int modear | AR Pattern 0:off,1:continuous,2:instantaneous,3:fix and hold,4:ppp-ar) | 3 |
| int glomodear | GLONASS AR mode (0:off,1:on,2:auto cal,3:ext cal) | 0 |
| int bdsmodear | BeiDou AR mode (0:off,1:on) | 1 |
| int maxout | obs Interrupt the count to reset the deviation | 5 |
| int minlock | Minimum lock count to fix ambiguity | 0 |
| int minfix | Minimum repair count to maintain ambiguity | 10 |
| int armaxiter | Maximum iteration to resolve ambiguity | 1 |
| int ionoopt | Ionospheric options (IONOOPT_???) | 0 |
| int tropopt | Tropospheric options (TROPOPT_???) */ | 0 |
| int dynamics | The kinetic model (0:none,1:velociy,2:accel) */ | 0 |
| int tidecorr | Earth tide correction (0:off,1:solid,2:solid+otl+pole) | 0 |
| int niter | Filter iterations | 1 |
| int codesmooth | Code smoothing window size (0:none) | 0 |
| int intpref | Insert reference obs( For later tasks ) | 0 |
| int sbascorr | SBAS Correction options | 0 |
| int sbassatsel | SBAS Satellite selection (0:all) | 0 |
| int rovpos | Mobile station location in fixed mode | 0 |
| int refpos | The basic position of the relative pattern 0:pos in prcopt, 1:average of single pos 2:read from file, 3:rinex header, 4:rtcm pos) | 4 |
| double eratio[NFREQ] | code / Phase error rate | {100.0,100.0} |
| double err[5] | Measurement error factor [0]: Retain [1-3]: phase (m) Error factor a/b/c [4]: Doppler frequency (hz) | { 100.0,0.003,0.003,0.0,1.0 } |
| double std[3] | The initial state [0]bias,[1]iono [2]trop | { 30.0,0.03,0.3 } |
| double prn[6] | Process noise std [0]bias,[1]iono [2]trop [3]acch [4]accv [5] pos */ | { 1E-4,1E-3,1E-4,1E-1,1E-2,0.0 } |
| double sclkstab | Satellite clock stability ( second / second ) | 5E-12 |
| double thresar[8] | AR Verify the threshold | { 5.0,0.9999,0.25,0.1,0.05 } |
| double elmaskar | Ascending satellite AR Elevation mask (deg) | 0.0 |
| double elmaskhold | Mask highly to maintain ambiguity (deg) | 0.0 |
| double thresslip | No geometric phase slip threshold (m) | 0.05 |
| double maxtdiff | Maximum time difference ( second ) | 30.0 |
| double maxinno | Reject innovation threshold (m) | 30.0 |
| double maxgdop | Refuse gdop The threshold of | 30.0 |
| double baseline[2] | Baseline length constraint {const,sigma} (m) | { 0 } |
| double ru[3] | Fixed mode {x,y,z} (ecef) (m) Location of mobile station | { 0 } |
| double rb[3] | The relative pattern {x,y,z} (ecef) (m) Basic position of | { 2005046.4452 ,5411158.3826 ,2707856.6022 } |
| char anttype[2][MAXANT] | Antenna type {rover,base} | { “”,“” } |
| double antdel[2][3] | Antenna increment { {rov_e,rov_n,rov_u},{ref_e,ref_n,ref_u}} | { { 0 } } |
| pcv_t pcvr[2] | Receiver antenna parameters {rov,base} */ | { { 0 } } |
| unsigned char exsats[MAXSAT] | Excluded satellites (1:excluded,2:included) */ | { 0 } |
| int maxaveep | Maximum average period | |
| int initrst | Initialize by restarting | |
| int outsingle | adopt dgps/float/fix/ppp Interrupt output single | |
| char rnxopt[2][256] | rinex Options {rover,base} */ | |
| int posopt[6] | Positioning options | |
| int syncsol | Solution synchronization mode | |
| double odisp[2][6*11] | Ocean tide loading parameters {rov,base} */{rov,base} */ | |
| exterr_t exterr | Extended receiver error model | |
| int freqopt | Ban L2-AR | |
| char pppopt[256] | ppp Options | |
solopt_t
| Parameters | explain | default setting |
|---|---|---|
| int posf | Solution format (SOLF_???) | |
| int times | Time system (TIMES_???) | |
| int timef | Time format (0:sssss.s,1:yyyy/mm/dd hh:mm:ss.s) | |
| int timeu | The number of times after the decimal point | |
| int degf | latitude / Longitude format (0:ddd.ddd,1:ddd mm ss) | |
| int outhead | Output head (0: no ,1: yes ) | |
| int outopt | Output processing options (0: no ,1: yes ) | |
| int outvel | Output speed options (0: no ,1: yes ) | |
| int datum | data (0:WGS84,1: Tokyo ) | |
| int height | Height (0: ellipsoid ,1: Geodesic line ) | |
| int geoid | Geoid model (0:EGM96,1:JGD2000) | |
| int solstatic | The solution of static mode (0:all,1:single) | |
| int sstat | Solution statistical level (0: close ,1: state ,2: residual ) | |
| int trace | Debug trace level (0: close ,1-5: debugging ) | |
| double nmeaintv[2] | nmea Output interval (<0:no,0:all) nmeaintv[0]:gprmc,gpgga,nmeaintv[1]:gpgsv | |
| char sep[64] | Field separator | |
| char prog[64] | Program name | |
| double maxsolstd | Maximum standard deviation of solution output (m) (0:all) | |
filopt_t
#define MAXSTRPATH 1024 /* max length of stream path */
| char satantp [MAXSTRPATH] | Satellite antenna parameter file |
|---|---|
| char rcvantp [MAXSTRPATH] | Receiver antenna parameter file |
| char stapos [MAXSTRPATH] | Station file |
| char geoid [MAXSTRPATH] | External geoid data file |
| char iono [MAXSTRPATH] | Ionospheric data file |
| char dcb [MAXSTRPATH] | dcb Data files |
| char eop [MAXSTRPATH] | eop Data files |
| char blq [MAXSTRPATH] | Tide loading blq file |
| char tempdir [MAXSTRPATH] | ftp/http Temporary directory |
| char geexe [MAXSTRPATH] | Google Earth executive file |
| char solstat [MAXSTRPATH] | Solution statistics file |
| char trace [MAXSTRPATH] | Debug trace file |
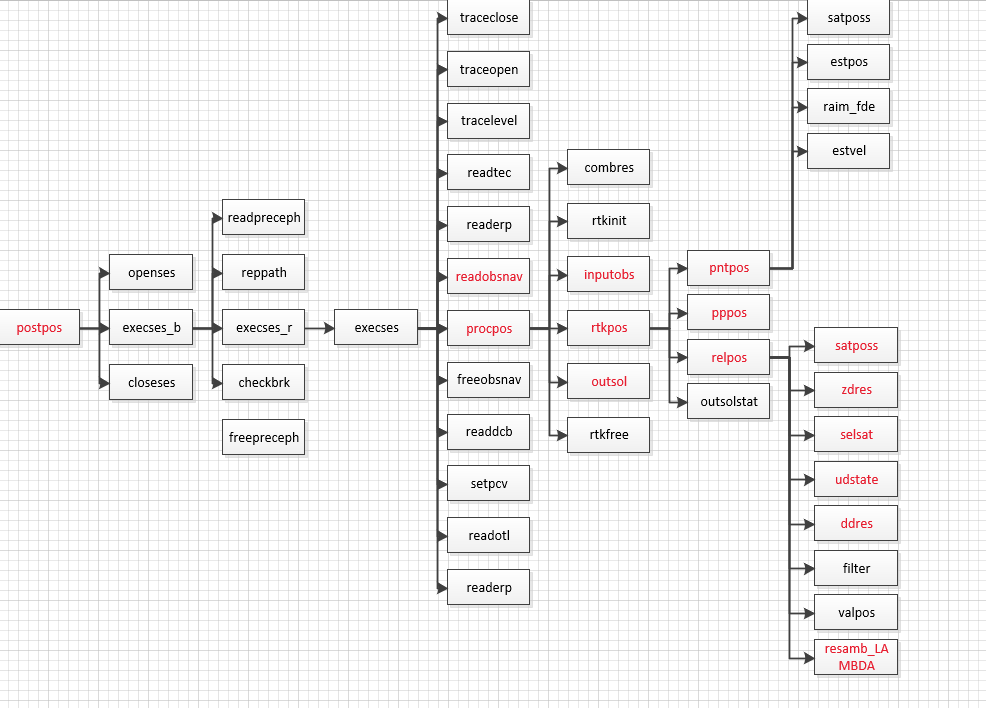
Post positioning :postpos
postpos The function prototype :
extern int postpos(gtime_t ts, gtime_t te, double ti, double tu,
const prcopt_t *popt, const solopt_t *sopt,
const filopt_t *fopt, char **infile, int n, char *outfile,
const char *rov, const char *base)
| gtime_t ts | Processing start time , If 0 Means unlimited |
|---|---|
| gtime_t te | Processing end time , If 0 Means unlimited |
| double ti | Processing interval (s) |
| double tu | Processing unit time (s) |
| prcopt_t *popt | Processing options |
| solopt_t *sopt | Solution options |
| filopt_t *fopt | file option |
| char **infile | Input file |
| int n | Enter the number of files |
| char *outfile | The output file |
| char *rov | Mobile station ID list , use ”” Separate |
| char *base | The base station ID list , use ”” Separate |
return : state (0:ok,0>:error,1:aborted)
* Be careful : The input file should contain observation data 、 Navigation data 、 The precise
* Ephemeris / The clock ( Optional ),sbas Log files ( Optional ),ssr Information ( Optional ).
* Log files ( Optional ) And tech grid files ( Optional ).
* The first observation data file in the input file is considered to be the data of the mobile station .
* The type of input file is recognized by the file extension
* The type of input file is identified by the file extension , As follows .
* .sp3, .SP3, .eph*, .EPH*: Precise ephemeris (sp3c).
* .sbs,.SBS,.ems,.EMS : sbas Message log file (rtklib or ems)
* .lex,.LEX : qzss lex Message log file
* .rtcm3,.RTCM3 : ssr Message log file (rtcm3)
* .*i,.*I : tec Grid files (ionex)
* .FCB,.FCB : satellite FCB
* other :Rinex Observation point 、 Navigation 、 grid 、 Xi Wang 、Q Net or clock
openses function : Preprocessing
static int openses(const prcopt_t *popt, const solopt_t *sopt,const filopt_t *fopt, nav_t *nav, pcvs_t *pcvs, pcvs_t *pcvr)
https://blog.csdn.net/wuwuku123/article/details/106068946
Purpose : By reading the filopt_t fopt Parameters in , among filopt_t The structure is defined as follows , Realize to ‘ File reading ’, The read subfunction is openses!
execses_b
https://blog.csdn.net/wuwuku123/article/details/106068946
Purpose : By reading the filopt_t fopt Parameters in , among filopt_t The structure is defined as follows , Realize to ‘ File reading ’, The read subfunction is openses!
execses_b
Processing base station
版权声明
本文为[haoming Hu]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204231646358699.html
边栏推荐
- ByteVCharts可视化图表库,你想要的我都有
- Phpstudy V8, a commonly used software for station construction 1 graphic installation tutorial (Windows version) super detailed
- Detailed explanation of Niuke - Gloves
- Introduction to how to set up LAN
- Nifi fast installation and file synchronization
- How to build tiktok user trust and drive fan growth
- LVM与磁盘配额
- 如何建立 TikTok用户信任并拉动粉丝增长
- 伪分布安装spark
- 无线鹅颈麦主播麦手持麦无线麦克风方案应当如何选择
猜你喜欢
Construction of promtail + Loki + grafana log monitoring system
English | day15, 16 x sentence true research daily sentence (clause disconnection, modification)
LVM与磁盘配额
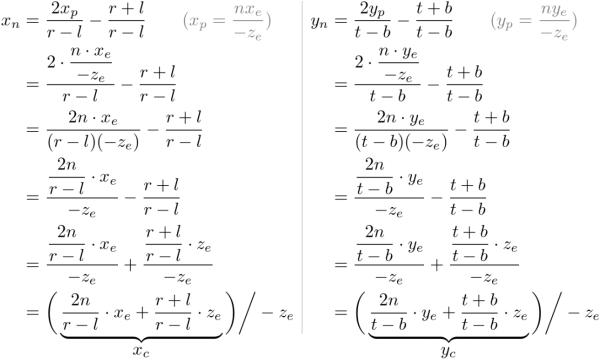
Derivation of Σ GL perspective projection matrix
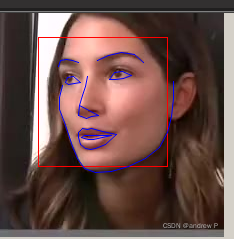
人脸识别框架之dlib
Take according to the actual situation, classify and summarize once every three levels, and see the figure to know the demand
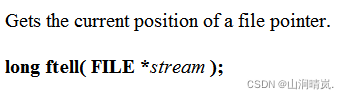
文件操作详解(2)
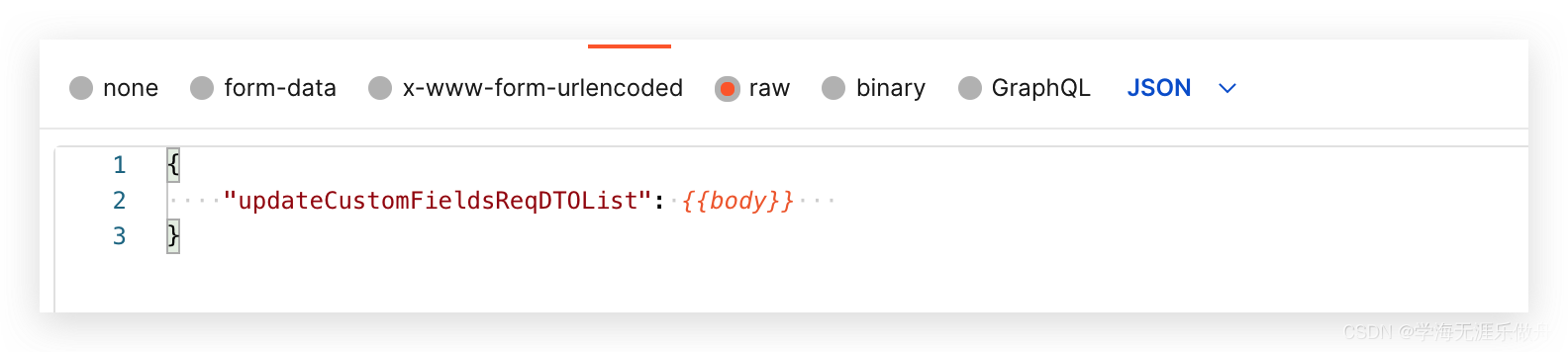
Postman batch production body information (realize batch modification of data)

ByteVCharts可视化图表库,你想要的我都有
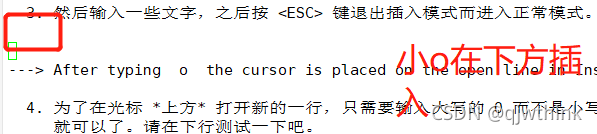
vim编辑器的实时操作
随机推荐
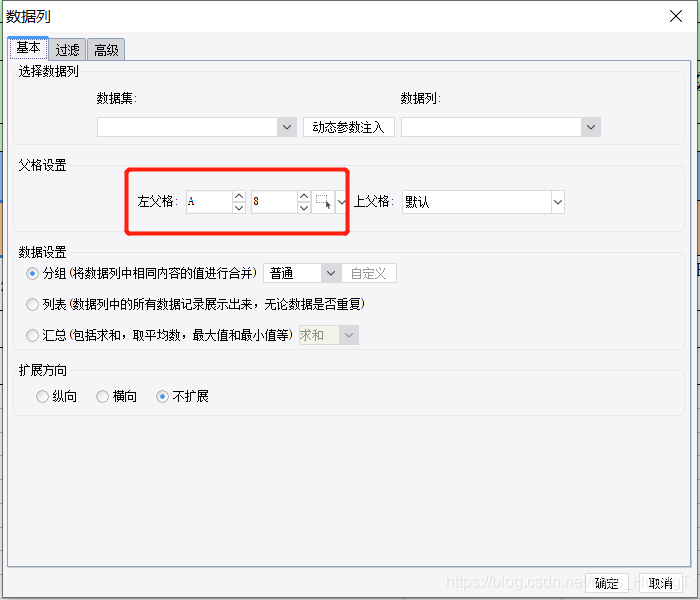
Summary according to classification in sail software
计组 | 【七 输入/输出系统】知识点与例题
Blue Bridge Cup provincial road 06 -- the second game of the 12th provincial competition
Sail soft segmentation solution: take only one character (required field) of a string
org. apache. parquet. schema. InvalidSchemaException: A group type can not be empty. Parquet does not su
Redis "8" implements distributed current limiting and delay queues
MySQL master-slave replication
Real time operation of vim editor
Postman batch production body information (realize batch modification of data)
Gartner announces emerging technology research: insight into the meta universe
织梦DEDECMS安全设置指南
昆腾全双工数字无线收发芯片KT1605/KT1606/KT1607/KT1608适用对讲机方案
DanceNN:字节自研千亿级规模文件元数据存储系统概述
磁盘管理与文件系统
文件操作详解(2)
关于局域网如何组建介绍
各大框架都在使用的Unsafe类,到底有多神奇?
Execution plan calculation for different time types
Copy constructor shallow copy and deep copy
Server log analysis tool (identify, extract, merge, and count exception information)